Cant get duet 2 in corexy to move correctly
-
if i move in X, X moves at a 45° and 1 Z motor moves
what is the command you issued?
-
greetings
I see that in the M669 command of config.g you only define the kinematics type as corexy (K1) but you do not define the motion matrix.
i use the following command on my corexy printer and it works fine for me
M669 K1 X1: 1 Y1: -1the console output it gives me is as follows:
M669
Kinematics is CoreXY, matrix:
1.00 1.00 0 0
1.00 -1.00 0 0
0 0 1.00 0
0 0 0 1.00I hope it serves
-
for the default corexy M669 K1 does not need parameters.
you seem to need it because you have 4 axis. -
how i moved it was:
the printer is a 300x300x300 so i moved it to the center on x,y and z and (by hand) and sent a g92 of 150 on all three and then used the paneldue jog screen on move around
-
-
The dzuki is always a good place to start, but movment on Z when i move the X or Y I think shows of a larger underlying problem
I tried it on two seperate duet2wifi's one on 2.xx and 3.xx firmware with the same outcome I must have missed a step some where
I'm going to hard reset one and reload the firmware -
change out of corexy mode and test each motor seperately
-
@Veti I like you idea so I erased a board reloaded firmware to start fresh on and rebuild the sd card files. On Cartesian Kinematics I set the motor output to M584 Z0 Y1 X2 E3 (to match board silkscreen) and placed to motor wires on the board to match and everything works as planed
") then thats when i powered down the board and on reboot with no changes Z and X swaped places? now the motor output is not matching the M584?
then thats when i powered down the board and on reboot with no changes Z and X swaped places? now the motor output is not matching the M584? -
@Szwalkiewicz said in Cant get duet 2 in corexy to move correctly:
M584
run the command in the console and see if it matches
-
@Szwalkiewicz said in Cant get duet 2 in corexy to move correctly:
M584 Z0 Y1 X2 E3
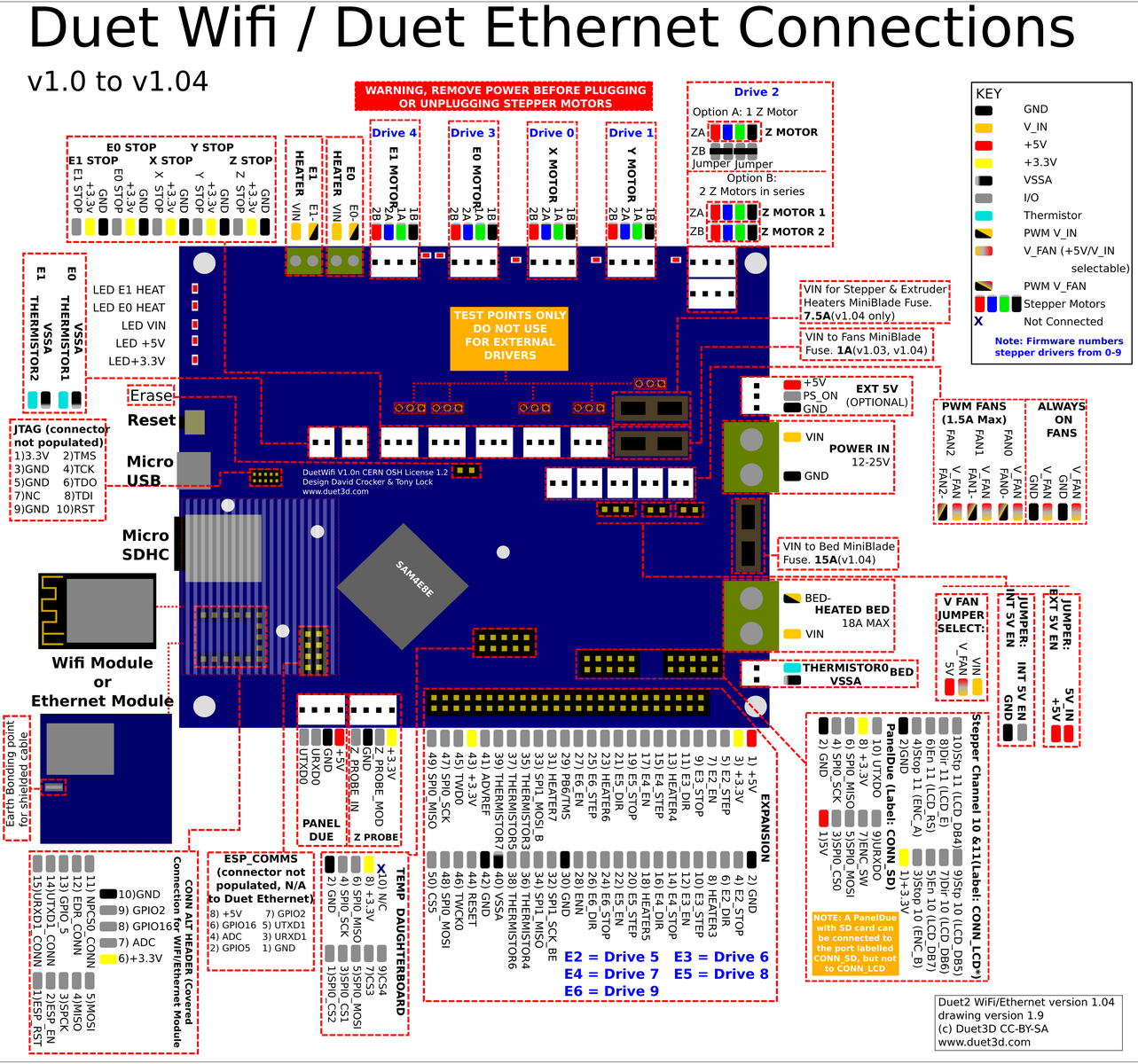
0 is not the Z driver. The default would be M584 X0 Y1 Z2 E3:4
So when you are seeing movement of the Z axis it's probably because you have the x or y motor connected to the z stepper or z axis motor to the x stepper.
-
@Phaedrux Thanks Phaedrux and Veti for your time and help. I incorrectly assumed the drive assignments