Per phase rating
-
Hello,
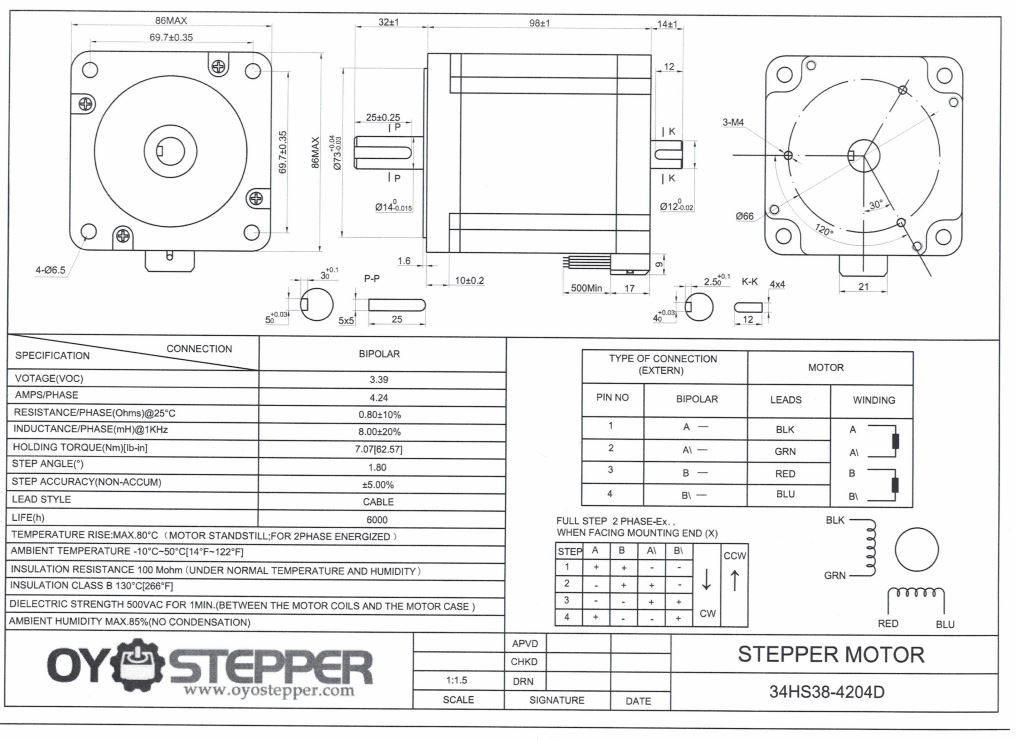
I'm considering buying a duet 3 to build a heavy duty 3d printer. I already have the motors, but I'm a little confused regarding the current draw. I'm gonna run these motors on 24V and they are rated for 4.24A/phase
The Duet 3 is rated for 4.4A for both winding at the same time. Does it means that in reality my motors being bipolar will draw 8.48A and won't be able to be used with the Duet3 correctly?
Thank you for you help.
-
They are rated to 4.24A at 3.39V.
So if you gave them unlimited current at 24V they would draw way more than 4A and burn out.
(specifically, based on the datasheet, at 24V they could draw ~30A, if you let them).However, stepper drives inherently limit the current they supply to the motor. So, assuming you don't exceed the rated current of the motor (for too long, as its really a thermal limit) they will work.
As to if they are a good match to the driver?
Maybe... Worth a try!
Isolate, substitute, verify.
-
Thanks a lot !
-
@theruttmeister Thank you for you answer. I'm pretty green regarding motors and I appreciate your input.
I understand that the driver will limit the current and that I can applied 4.4A per motor using the Duet3.
My understanding is that more voltage will allow me to get more speed. Current will allow me to Hold the torque. Am I correct ?
My understanding is that the duet3 will not be able to energize both phase at 4.4A at the same time, but will provide a 4.4A to the whole motor, so the torque will be about the half of the motor capacity ? Am I correct ?
Thanks again !
-
@Fabmonkey You are wrong. Duet3 will handle this motor just fine.
https://duet3d.dozuki.com/Wiki/Duet_3_Expansion_Hardware_Overview
Three high-current advanced TMC5160 stepper drivers: SPI controlled will all the latest Trinamic features. >Maximum motor current 6.3A peak per phase (4.45A RMS).
Also You should not run motor at 100% current - by the rule of thumb use about 75%-80%. Configure it 3200mA - 3400mA and You are set.
-
@Fabmonkey said in Per phase rating:
@theruttmeister Thank you for you answer. I'm pretty green regarding motors and I appreciate your input.
I understand that the driver will limit the current and that I can applied 4.4A per motor using the Duet3.
My understanding is that more voltage will allow me to get more speed. Current will allow me to Hold the torque. Am I correct ?
Yes. The driver is applying an alternating voltage to the coils, it takes time for the current to rise in the coil. Higher voltage causes the current to rise faster, so you can generate more torque at a given speed. Torque is the real speed limit, higher voltage is just letting you generate more at speed.
Torque curves for the motor should make it more clear.My understanding is that the duet3 will not be able to energize both phase at 4.4A at the same time, but will provide a 4.4A to the whole motor, so the torque will be about the half of the motor capacity ? Am I correct ?
Thanks again !
Motors and drivers use the same conventions for current rating, so a 4.4A driver should give you 100% torque.
And because its a thermal limit, you can hit a much higher peak (and Trinamic drivers actively scale current) and a lower sustained (RMS). The motor rating is normally the sustained value.
But motors don't have thermal protection devices, so its better to under drive them. -
It's slightly more complicated.
The rated current for a stepper motors is invariably quoted for full stepping with both coils energised. So a motor rated at 4.2A/phase is specified with 4.2A current in both phases at once.
When you use microstepping, the full current is never applied to both phases at once. The current may be specified as RMS or as peak.
In theory, a motor specified at 4.2A could be run at 4.2A RMS, which is 4.2 * sqrt(2) amps peak. It would dissipate the same power as having 4.2A in each winding, but the power would be split differently between the windings depending on the microstep position. Splitting it differently doesn't matter provided that it is stepping at a reasonable speed (e.g. >= 10 full steps per second). When the motor is stationary, you should not exceed 4.2A per phase. The drivers on Duet 3 have the facility to reduce the current automatically when the motor is not moving.
In practice the motor will get very hot it you run it at full rated current, so it's normally recommended to run motors at a peak per-phase current no greater than about 80% of their rated current. But if you can handle the heat dissipation, then you can go higher. The drivers on Duet 3 MB6HC can provide up to 6.3A peak when the motor is moving, and up to 4.5A when it is at standstill.
HTH David
-
Thank you all for your explanation. It really helps ! I'll give it a try.
Have a wonderful evening !
-
We're pretty gentle with steppers on a whole since to maximize their life. The 80-85% rule of thumb is largely to maximize motor lifetime and gives a fairly universal set it and forget it answer.
Per nema standards the typical NEMA 17 motor is class B and the insulation for it is rated for 80c (176f) rise over 40C (104f) ambient plus 10C to allow for Hotspot. So if the the insulation on the windings is fine until 130C (266F). You have about a 30C temperature drop between windings and the case, so as long as your motors case where you would measure stays below 100C ( 212F), you are within specs. Most people worry when their motor gets uncomfortable to touch which is probably around 40-60c.
That said, the cooler your motor stays the better lifetime it has as well as the insulation rating doesn't consider other things like how that temperature affects motors bearing lifetime which is very much impacts our print quality, or the need to provide cooling for the drivers (which on other control boards is often not simple and necessary much sooner on for a given current)