Motors Don't Stop At End Stops
-
After reading through all related forum posts and troubleshooting guides, I am at a loss with setting up homing on the X and Y-axis. The motors do not stop when their corresponding end-stops are hit even though using M119 and machine properties in the web GUI, all switches are detected and functional. Any help would be much appreciated as I feel I have tried everything that can be done here. Thank you.
Specs:
Duet 2 Maestro 24V
NEMA 17 steppers
End stops from Ender 3
Custom-built machine (900x320x500mm) x,y,z2 Outer pins on the Ender 3 end stop switches wired to the 2 outer pins on the board (GND & signal (ystop))
; Configuration file for Duet Maestro (firmware version 2.03)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.2.3 on Fri Mar 26 2021 20:19:05 GMT+0000 (Greenwich Mean Time)
M564 S0 H0
; General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"Ender 3 Pro" ; set printer name; Network
M552 P0.0.0.0 S1 ; enable network and acquire dynamic address via DHCP
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet; Drives
M569 P0 S1 ; physical drive 0 goes forwards
M569 P1 S1 ; physical drive 1 goes forwards
M569 P2 S1 ; physical drive 2 goes forwards
M569 P3 S0 ; physical drive 3 goes backwards
M584 X0 Y1 Z2 E3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z1600.00 E93.00 ; set steps per mm
M566 X1200.00 Y1200.00 Z24.00 E300.00 ; set maximum instantaneous speed changes (mm/min)
M203 X9000.00 Y9000.00 Z180.00 E6000.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z100.00 E5000.00 ; set accelerations (mm/s^2)
M906 X800 Y800 Z800 E1000 I50 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
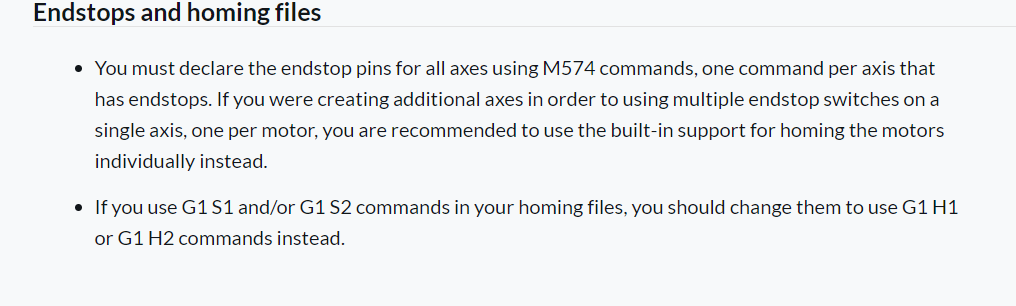
M208 X900 Y320 Z500 S0 ; set axis maxima; Endstops
M574 X2 Y1 Z1 S1 ; set active high endstops; Z-Probe
M558 P0 H5 F120 T6000 ; disable Z probe but set dive height, probe speed and travel speed
M557 X15:215 Y15:195 S20 ; define mesh grid; Heaters
M140 H-1 ; disable heated bed
M305 P1 T100000 B4092 R2200 ; set thermistor + ADC parameters for heater 1
M143 H1 S275 ; set temperature limit for heater 1 to 275C; Fans
M106 P0 S0 I0 F500 H-1 ; set fan 0 value, PWM signal inversion and frequency. Thermostatic control is turned off
M106 P1 S1 I0 F500 H1 T45 ; set fan 1 value, PWM signal inversion and frequency. Thermostatic control is turned on
M106 P2 S1 I0 F500 H1:0 T45 ; set fan 2 value, PWM signal inversion and frequency. Thermostatic control is turned on; Tools
M563 P0 D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C; Custom settings are not defined
; homey.g
; called to home the Y axis
;
; generated by RepRapFirmware Configuration Tool v3.2.3 on Fri Mar 26 2021 20:19:05 GMT+0000 (Greenwich Mean Time)
G91 ; relative positioning
G1 H2 Z5 F6000 ; lift Z relative to current position
G1 H1 Y-325 F3000 ; move quickly to Y axis endstop and stop there (first pass)
G1 H2 Y5 F6000 ; go back a few mm
G1 H1 Y-325 F240 ; move slowly to Y axis endstop once more (second pass)
G1 H2 Z-5 F6000 ; lower Z again
G90 ; absolute positioning -
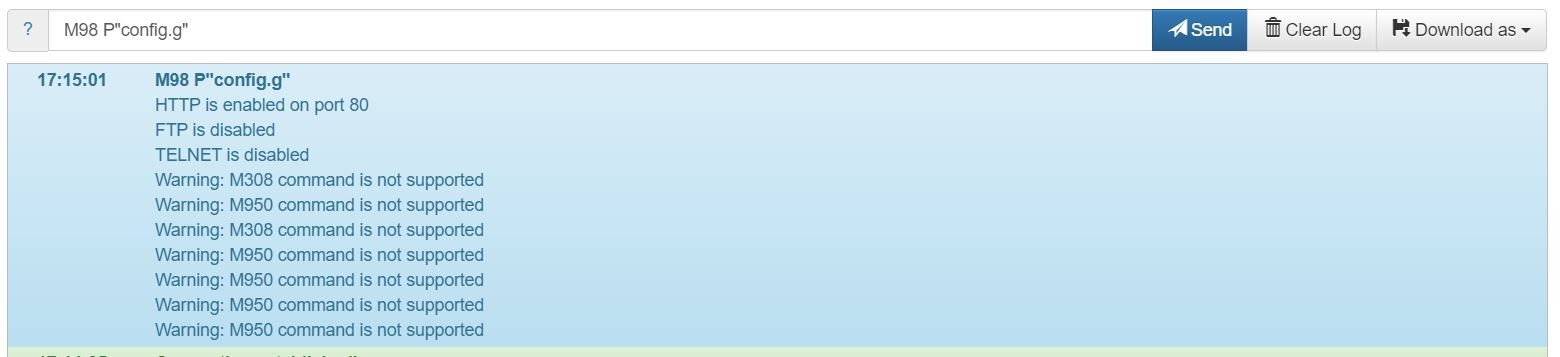
Can you send M122 and M98 P"config.g" and post the results please?
I wonder if your firmware version matches your config.
-
-
-
Those warnings would indicate a mismatch between your firmware and your config.
The config you posted is for RRF2, but it doesn't have the commands that are showing the warnings. Are you sure that the config you posted is the config you're using in the system folder?
Your firmware is quite out of date.
If you still have access to DWC. Upload these 3 zip files, one at a time in the system tab. Don't extract them. Reboot after each. Use M115 to verify the firmware has been applied.
https://github.com/Duet3D/RepRapFirmware/releases/download/2.05.1/Duet2Firmware-2.05.1.zip
https://github.com/Duet3D/RepRapFirmware/releases/download/3.0/Duet2and3Firmware-3.0.zip
https://github.com/Duet3D/RepRapFirmware/releases/download/3.2.2/Duet2and3Firmware-3.2.2.zip
That will get your firmware and DWC up to date.You can see the change logs here:
https://github.com/Duet3D/RepRapFirmware/wiki/Changelog-RRF-3.xFor your config, might be a good idea to run through the configurator tool and generate a fresh set for RRF3.
https://configtool.reprapfirmware.org/StartBackup your existing config files in the sys folder in case you want to switch back to RRF3. IT’s easy to switch back and forth, just upload the zip file for the version you want and then upload your config files.
These documents will come in handy during the conversion.
https://duet3d.dozuki.com/Wiki/RepRapFirmware_3_overview
https://duet3d.dozuki.com/Wiki/Gcode -
@Phaedrux I have uploaded the first .zip however during the upload an error appeared saying that some files were not uploaded because they were not suitable for the board... Is this still alright?
-

-
Yes it looks like you're on 3.2.2 now.
Your DWC doesn't look like it's updated yet. Or you're still using an old URL that is pointing to the older version.
Can you connect to DWC by just the ip address of the Duet?
You can check the DWC version as well in one of the tab views on DWC.
You can upload the 3.2.2 zip file again. Sometimes it won't all update on the first attempt.
-
@Phaedrux
 M122
M122
=== Diagnostics ===
RepRapFirmware for Duet 2 Maestro version 3.2.2 running on Duet Maestro 1.0
Board ID: 08DJM-9X66L-LG3SN-6JTDJ-3S06Q-T8X2P
Used output buffers: 1 of 24 (19 max)
=== RTOS ===
Static ram: 22284
Dynamic ram: 66232 of which 40 recycled
Never used RAM 26276, free system stack 222 words
Tasks: NETWORK(ready,254) HEAT(blocked,353) TMC(blocked,117) MAIN(running,498) IDLE(ready,21)
Owned mutexes:
=== Platform ===
Last reset 00:01:13 ago, cause: software
Last software reset details not available
Error status: 0x00
Aux0 errors 0,0,0
MCU temperature: min 37.2, current 37.4, max 38.1
Supply voltage: min 0.0, current 24.1, max 24.2, under voltage events: 0, over voltage events: 0, power good: yes
Driver 0: position 0, standstill, read errors 0, write errors 1, ifcnt 50, reads 12270, writes 6, timeouts 0, DMA errors 0
Driver 1: position 0, standstill, read errors 0, write errors 1, ifcnt 50, reads 12270, writes 6, timeouts 0, DMA errors 0
Driver 2: position 0, standstill, read errors 0, write errors 1, ifcnt 49, reads 12270, writes 6, timeouts 0, DMA errors 0
Driver 3: position 0, standstill, read errors 0, write errors 1, ifcnt 49, reads 12270, writes 6, timeouts 0, DMA errors 0
Driver 4: position 0, standstill, read errors 0, write errors 1, ifcnt 47, reads 12270, writes 6, timeouts 0, DMA errors 0
Driver 5: position 0, assumed not present
Driver 6: position 0, assumed not present
Date/time: 2021-03-27 17:35:43
Slowest loop: 98.76ms; fastest: 0.17ms
I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0
=== Storage ===
Free file entries: 10
SD card 0 detected, interface speed: 15.0MBytes/sec
SD card longest read time 0.9ms, write time 95.4ms, max retries 0
=== Move ===
DMs created 83, maxWait 0ms, bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== AuxDDARing ===
Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters = 0 -1, chamberHeaters = -1 -1
=== GCodes ===
Segments left: 0
Movement lock held by null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
Daemon is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty.
=== Network ===
Slowest loop: 98.79ms; fastest: 0.02ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions
HTTP sessions: 1 of 8
Interface state active, link 100Mbps full duplex -
 This may be the issue
This may be the issue -
Your DWC is still not updated. I think you will need to manually update it by pulling the SD card from the duet and using your PC to replace the /www folder.
Download this zip file and use it to replace the contents of the /www folder on the SD card.
https://github.com/Duet3D/RepRapFirmware/releases/download/3.2.2/DuetWebControl-SD.zipAs for your config and homing files I suggest you use the config tool linked above to generate a new set for RRF3.
-
Thanks for all the help, I have now got it all updated and looks to be the new version, whole new web GUI... end stops now work perfectly, cannot thank you enough for the help.

-
No problem. Glad we got you sorted.