Recognise obstacle and store position?
-
Hi!
Is there a way to use the sensorless homing option of my Duet 3 Mini 5+ to recognise an obstacle and store its z-position?
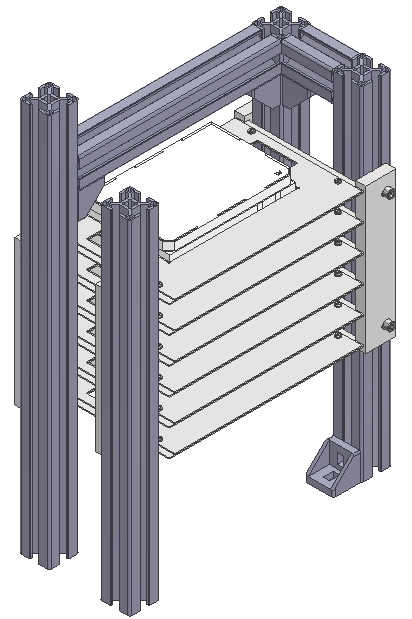
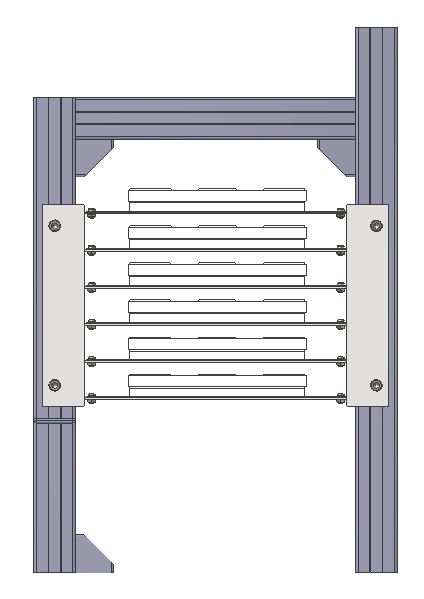
I'm using the board for a pick and place application, where I pick up items out of a shelf. My shelf is fixed to some aluminium profils like in the pictures below. With all the tolerances in the build, it's difficult to define the exact z-distance my pick-up unit will have to travel to reach the first shelf.
My idea was to let the pick-up unit travel in the general position and move down until it touches the top shelf. Like with sensorless homing, the driver should notice the resistance. Then I would like to store the absolute position of the z-axis (and not set the position as new axis 0) as reference for the following pick-and-place movements.
Is there a way to implement the described process?
I'm using a Duet 3 Mini 5+ with the latest RepRap Firmware (3.4.5).
Any suggestions would be appreciated!
")
-
@Saschka why not use a probe and use something like a G30 S-1 move?
-
@jay_s_uk The whole setup will be inside of an incubator, with a very small hole for cables. I simply don't have the space to pull through another cable.
-
@Saschka you may be able to use a G1 H4 move in that case. Just make sure you setup the correct sensorless parameters