Y axis Hesitates on Homeall and Homey [SOLVED]
-
Hi all.
I decommissioned a delta and repurposed the Mini 5 on an old TAZ 4, which ran solid with the Maestro board, but I thought I'd give it an upgrade. I feel I'm 99% there, but the y axis has me frustrated.
When I command a "homeall", I notice an odd behavior with the y axis, it starts at the same time as x, but then the y stalls, then tries to move again with hesitation, only after the x has finished it's homing procedure. The y restarts slowly, then accelerates hitting the minimum limit hard (I e-stop it here).
I have tried several things, like reversing the direction of y and changing the endstop to high end, no success. Changed the drive assignment physically and in the config to match, same results. M119, show that the endstops are getting triggered when I actuate them by hand. Nonetheless, x and z axis home fine.
Than you!
; Configuration file for Duet 3 Mini 5+ (firmware version 3.3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.3.16 on Sat Sep 30 2023 23:42:55 GMT-0700 (Pacific Daylight Time) ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"Old Man TAZ" ; set printer name ; Network M552 P0.0.0.0 S1 ; enable network and acquire dynamic address via DHCP M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0.0 S0 ; physical drive 0.1 goes backwards (X Axis) M569 P0.1 S0 ; physical drive 0.2 goes forwards (Y Axis) M569 P0.2 S0 ; physical drive 0.3 goes backwards (Z1 Axis) M569 P0.3 S0 ; physical drive 0.3 goes backwards (Z2 Axis) M569 P0.4 S0 ; physical drive 0.0 goes backwards (Extruder) ; Movements M584 X0.0 Y0.1 Z2:3 E0.4 ; set drive mapping M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X100.00 Y100.00 Z1200.00 ; set steps per mm M92 E420.00 ; set extruder E0 steps/mm M566 X1000.00 Y1000.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z20.00 E250.00 ; set accelerations (mm/s^2) M906 X800 Y800 Z800 E1000 I60 ; set motor currents (mA) and motor idle factor in per cent M84 S60 ; Set idle timeout ; Axis Limits M671 X20:140 Y145:145 S2.0 P0.5 ; lead-screws at left and right of X axis, X270:55:270:55 Y235:235:15:15 M208 X0 Y0 Z0 S1 ; set axis minima M208 X295 Y295 Z250 S0 ; set axis maxima ; Endstops M574 X1 S1 P"!io6.in" ; configure switch-type (e.g. microswitch) endstop for low end on X via pin !io6.in M574 Y1 S1 P"!io5.in" ; configure switch-type (e.g. microswitch) endstop for low end on Y via pin !io5.in M574 Z1 S2 ; Z-Probe M950 S0 C"io3.out" ; create servo pin 0 for BLTouch M558 P9 C"io3.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds G31 P10 X0 Y-45 Z1.675 ; set Z probe trigger value, offset and trigger height M557 X20:275 Y30:240 S40 ; define mesh grid ; Heaters M308 S0 P"temp0" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin temp0 M950 H0 C"out0" T0 ; create bed heater output on out0 and map it to sensor 0 M307 H0 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S120 ; set temperature limit for heater 0 to 120C M307 H0 R0.130 K0.150:0.000 D10.00 E1.35 S1.00 B1 ; PID Tuning M308 S1 P"temp1" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin temp1 M950 H1 C"out1" T1 ; create nozzle heater output on out1 and map it to sensor 1 M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit M143 H1 S280 ; set temperature limit for heater 1 to 280C M307 H1 R2.195 K0.334:0.276 D5.26 E1.35 S1.00 B0 V25.0 ; PID Tuning ; Fans M950 F0 C"vfd" Q500 ; create fan 0 on pin vfd and set its frequency M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off M950 F1 C"out5" Q500 ; create fan 1 on pin out5 and set its frequency M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on ; Tools M563 P0 S"E3D_E0" D0 H1 F0 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C ; Custom settings are not definedM122 === Diagnostics === RepRapFirmware for Duet 3 Mini 5+ version 3.4.6 (2023-07-21 14:09:13) running on Duet 3 Mini5plus Ethernet (standalone mode) Board ID: Z4XQ1-1096U-D65J0-40KMA-2T03Z-RQ92N Used output buffers: 1 of 40 (26 max) === RTOS === Static ram: 103712 Dynamic ram: 104764 of which 12 recycled Never used RAM 33104, free system stack 144 words Tasks: NETWORK(ready,27.2%,174) ETHERNET(notifyWait,0.2%,560) HEAT(notifyWait,0.0%,342) Move(notifyWait,0.0%,290) CanReceiv(notifyWait,0.0%,941) CanSender(notifyWait,0.0%,335) CanClock(delaying,0.0%,342) TMC(notifyWait,0.7%,72) MAIN(running,71.0%,423) IDLE(ready,0.0%,30) AIN(delaying,0.8%,263), total 100.0% Owned mutexes: === Platform === Last reset 01:08:54 ago, cause: software Last software reset at 2023-10-01 11:57, reason: User, GCodes spinning, available RAM 33224, slot 2 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00000000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a Error status: 0x00 MCU revision 3, ADC conversions started 4134730, completed 4134729, timed out 0, errs 0 Step timer max interval 752 MCU temperature: min 36.4, current 36.6, max 36.9 Supply voltage: min 24.5, current 24.5, max 24.5, under voltage events: 0, over voltage events: 0, power good: yes Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0 Events: 0 queued, 0 completed Driver 0: standstill, SG min 4, read errors 0, write errors 0, ifcnt 98, reads 549, writes 0, timeouts 0, DMA errors 0, CC errors 0 Driver 1: standstill, SG min 0, read errors 0, write errors 0, ifcnt 110, reads 549, writes 0, timeouts 0, DMA errors 0, CC errors 0 Driver 2: standstill, SG min 2, read errors 0, write errors 0, ifcnt 110, reads 548, writes 0, timeouts 0, DMA errors 0, CC errors 0 Driver 3: standstill, SG min 2, read errors 0, write errors 0, ifcnt 110, reads 549, writes 0, timeouts 0, DMA errors 0, CC errors 0 Driver 4: standstill, SG min 0, read errors 0, write errors 0, ifcnt 89, reads 549, writes 0, timeouts 0, DMA errors 0, CC errors 0 Driver 5: not present Driver 6: not present Date/time: 2023-10-01 13:06:40 Cache data hit count 4294967295 Slowest loop: 1.79ms; fastest: 0.13ms === Storage === Free file entries: 10 SD card 0 detected, interface speed: 22.5MBytes/sec SD card longest read time 0.4ms, write time 0.0ms, max retries 0 === Move === DMs created 83, segments created 5, maxWait 0ms, bed compensation in use: none, comp offset 0.000 === MainDDARing === Scheduled moves 8, completed 8, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === AuxDDARing === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters 0 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0 === GCodes === Segments left: 0 Movement lock held by null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty === CAN === Messages queued 94, received 0, lost 0, boc 0 Longest wait 0ms for reply type 0, peak Tx sync delay 0, free buffers 18 (min 18), ts 52/0/0 Tx timeouts 0,0,52,0,0,42 last cancelled message type 4514 dest 127 === Network === Slowest loop: 3.52ms; fastest: 0.04ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) HTTP sessions: 1 of 8 = Ethernet = State: active Error counts: 0 0 0 0 0 0 Socket states: 5 2 2 2 2 0 0 0 -
@Silrocco I can't see any problems with the config, it is probably worth running M98 p"config.g" to check it for any errors. Could you also post your homing files?
-
@gloomyandy Hi.
I just solved the issue. I noticed in Object Model that the Y endstop was not showing "highEnd" and "type" it was for the X, but it was triggering, but not home as mentioned. So I switched over to another io, io5 to io2 and that solved it!
![Fixed]
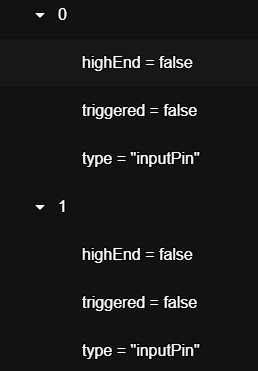 image url)
image url)One more thing, I switched over to Normally Closed.
-
 undefined Phaedrux marked this topic as a question
undefined Phaedrux marked this topic as a question
-
undefined Phaedrux has marked this topic as solved