homing error in x-y axes
-
I also get the following error message: "G1: G0/G1: insufficient axes homed". Could this not be an endstop problem? I have a DueX5 extension board as I drive 3 pcs Z nema17 stepper motors. However, on the DueX5 board, I see a small "crater" on the first chip of the TMC2660 stepper. Could this chip be broken and cause the homing process to fail? I haven't run the M122 command yet.
-
It would seem that if a driver chip was defective you would observe the lack of motion by the associated stepper motor.
When are you seeing this message?
Frederick
-
after switching on, when I want to issue the instructions "home all" or "home x" and "home y". He approaches the x-limit switch correctly, and then, as if he had not sensed the x limit switch, he wants to go x plus further, but obviously he cannot. After that I pressed a quick "emergency stop".
I took a picture of the duex5. as if one of the chips is faulty, but there are still 2 free connectors. is it possible to plug the 3 z stepper connectors through? I think this should be set in config.g.
Also, I am attaching an M122 query, even before issuing the hoing command. All other functions (extruder 0 and 1 heating, extruder 0; 1 fan, tool fans, chamber heating, bed heating) work, I tried them.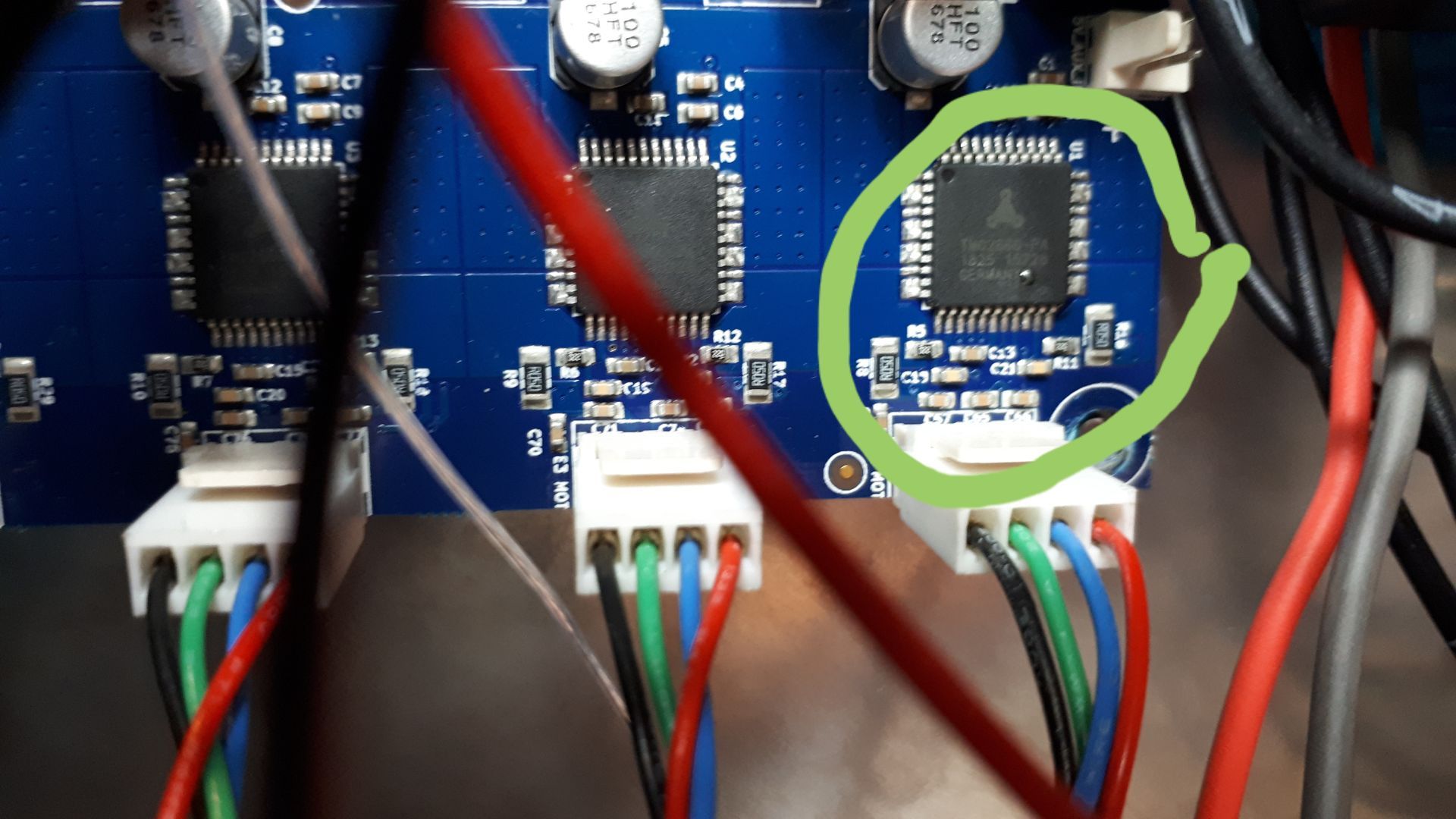 console.txt
console.txt -
Well the driver chip would not cause that behavior.
It could be that something has happened to the endstop switch, the wiring or the input on the board.
Please post your complete CONFIG.G file and your HOMING files.
Thanks.
Frederick
-
can anything be read from the console files? My knowledge does not extend to such a depth. If you see anything from the result of the M122 command, please let me know.
I am attaching the config.g file, I will share the homing.g soon. -
 undefined jonasr75 referenced this topic
undefined jonasr75 referenced this topic
-
It looks like you're running very old firmware.
Duet 2 WiFi/Ethernet version 2.05.1
config.g
; Configuration file for Duet WiFi (firmware version 2.00) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.2.3 on Mon Feb 22 2021 11:00:44 GMT+0100 (közép-európai téli idő) ; General preferences G21 ;work in mm G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"railcore" ; set printer name M667 S1 ; select CoreXY mode ; Network M551 P"" ; set password M552 S1 ; enable network M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0 S0 ; physical drive 0 goes forwards M569 P1 S1 ; physical drive 1 goes forwards M569 P3 S1 ; physical drive 3 goes forwards M569 P4 S0 ; physical drive 4 goes forwards M569 P5 S0 M569 P6 S0 M569 P7 S0 M584 X0 Y1 Z5:6:7 E3:4 ; set drive mapping M671 X-50:-50:378 Y25:270:165 S80 ; leadscrews at front left, rear left and middle right M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X200.00 Y200.00 Z1600.00 E800.00 ; set steps per mm M566 X1000.00 Y1000.00 Z100.00 E1500.00 ; set maximum instantaneous speed changes (mm/min) M203 X24000.00 Y24000.00 Z900.00 E3600.00 ; set maximum speeds (mm/min) M201 X3000.00 Y3000.00 Z100.00 E1500.00 ; set accelerations (mm/s^2) M906 X1200 Y1200 Z1200 E1000 ; set motor currents (mA) M84 S0 ; Disable motor idle current reduction ; Axis Limits M208 X0 Y0 Z-0.5 S1 ; set axis minima M208 X290 Y260 Z330 S0 ; set axis maxima ; Endstops M574 X2 Y1 S1 ; set active high endstops M574 Z1 S2 ; set endstops controlled by probe ; Z-Probe ;///////////////////////////////////HightTemp3D//////////////////////////////////////////////////////////////// M307 H4 A-1 C-1 D-1 ; disable heater on PWM channel for BLTouch M558 P7 I0 ; set Z probe type to bltouch and the dive height + speeds G31 P500 X-26 Y-7,5 Z2.0 ; set Z probe trigger value, offset and trigger height ;////////////////////////////////////////////////////////////////////////////////////////////////////////////// ;//////////////////////////////////3DTouch///////////////////////////////////////////////////////////////////// ;////////////////////////////////////////////////////////////////////////////////////////////////////////////// ;////////////////////////////////////////////////////////////////////////////////////////////////////////////// ; Heaters M305 P0 T100000 B4725 R4700 ; set thermistor + ADC parameters for heater 0 M143 H0 S200 ; set temperature limit for heater 0 to 200C M305 P1 T500000 B3800 R4700 ; set thermistor + ADC parameters for heater 1 M143 H1 S450 ; set temperature limit for heater 1 to 450C M305 P2 T500000 B3800 R4700 ; set thermistor + ADC parameters for heater 2 M143 H2 S450 ; set temperature limit for heater 2 to 450C M141 H3 ; heater 3 is the chamber heater M305 P3 S"PTC Heater" X503 L60 ; heater 3 is monitored by a pt1000 sensor M307 H3 B0 S0.50 A56.7 C112.4 D28.5 ; use bang-bang control for the chamber heater M143 H3 S90 ; Fans M106 P3 S255 I0 H1:2 T50 ; set fan 0 value, PWM signal inversion and frequency. Thermostatic control is turned on M106 P4 S255 I0 H1:2 T50 ; set fan 1 value, PWM signal inversion and frequency. Thermostatic control is turned on M106 P5 S0 I0 H-1 ; set fan 2 value, PWM signal inversion and frequency. Thermostatic control is turned off M106 P6 S0 I0 H-1 ; set fan 3 value, PWM signal inversion and frequency. Thermostatic control is turned off M106 P8 S255 I0 H-1 ; Tools M563 P0 D0 H1 F5:6 ; define tool 0 G10 P0 X0 Y14.6 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C M563 P1 D1 H2 F5:6 ; define tool 1 G10 P1 X0 Y0 Z0 ; set tool 1 axis offsets G10 P1 R0 S0 ; set initial tool 1 active and standby temperatures to 0C ; Custom settings are not defined M501M122
2023. 10. 21. 10:32:07: Connected to 192.168.0.190 2023. 10. 21. 10:32:26: M122: === Diagnostics === RepRapFirmware for Duet 2 WiFi/Ethernet version 2.05.1 running on Duet WiFi 1.02 or later + DueX5 Board ID: 0JD0M-9P61A-J8PSJ-6J1F0-3SD6M-9AR6T Used output buffers: 1 of 24 (7 max) === RTOS === Static ram: 25712 Dynamic ram: 94016 of which 48 recycled Exception stack ram used: 272 Never used ram: 11024 Tasks: NETWORK(ready,676) HEAT(blocked,1232) DUEX(suspended,160) MAIN(running,3760) IDLE(ready,160) Owned mutexes: === Platform === Last reset 00:00:40 ago, cause: power up Last software reset details not available Error status: 0 Free file entries: 10 SD card 0 detected, interface speed: 20.0MBytes/sec SD card longest block write time: 0.0ms, max retries 0 MCU temperature: min 21.8, current 24.7, max 24.7 Supply voltage: min 24.0, current 24.1, max 24.1, under voltage events: 0, over voltage events: 0, power good: yes Driver 0: standstill, SG min/max not available Driver 1: standstill, SG min/max not available Driver 2: standstill, SG min/max not available Driver 3: standstill, SG min/max not available Driver 4: standstill, SG min/max not available Driver 5: standstill, SG min/max not available Driver 6: standstill, SG min/max not available Driver 7: standstill, SG min/max not available Driver 8: standstill, SG min/max not available Driver 9: standstill, SG min/max not available Date/time: 2023-10-21 10:32:26 Cache data hit count 112073486 Slowest loop: 8.06ms; fastest: 0.07ms I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0 === Move === Hiccups: 0, FreeDm: 160, MinFreeDm: 160, MaxWait: 0ms Bed compensation in use: none, comp offset 0.000 === DDARing === Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 === Heat === Bed heaters = 0 -1 -1 -1, chamberHeaters = 3 -1 === GCodes === Segments left: 0 Stack records: 2 allocated, 0 in use Movement lock held by null http is idle in state(s) 0 telnet is idle in state(s) 0 file is idle in state(s) 0 serial is idle in state(s) 0 aux is idle in state(s) 0 daemon is idle in state(s) 0 queue is idle in state(s) 0 autopause is idle in state(s) 0 Code queue is empty. === Network === Slowest loop: 14.21ms; fastest: 0.00ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0) HTTP sessions: 1 of 8 - WiFi - Network state is running WiFi module is connected to access point Failed messages: pending 0, notready 0, noresp 0 WiFi firmware version 1.21 WiFi MAC address e8:68:e7:78:c0:ca WiFi Vcc 3.38, reset reason Turned on by main processor WiFi flash size 4194304, free heap 16392 WiFi IP address 192.168.0.190 WiFi signal strength -54dBm, reconnections 0, sleep mode modem Socket states: 0 0 0 0 0 0 0 0Can you please post your homex.g homey.g homez.g and homeall.g files here so we can see what it's trying to do when homing?
-
@Phaedrux , hello, I'm writing a little comment about the history:
- the previous duet2 mainboard could not be repaired, so I had to order a new one
- I removed the SD card from the old board and inserted it into the new board
- on the new board, I turned on the Wi-Fi with the original USB cable and queried the diagnostics with code M122. I attached this earlier, the firmware is indeed 2.05.1, which may already need to be updated
- when I would have completed the homing process with the new board, I was faced with the error I wrote. I didn't change anything in config.g, homeall.g, homex.g, homey.g and homez.g on the SD card. Nevertheless, an error occurred during the home x and y processes. Maybe the new board doesn't work correctly with this outdated firmware?
From console 5, I gave the following instructions:
M569 P0 S0 ; X motor runs forwards M569 P1 S1 ; Y motor runs forwardsas wrote in config.g, and after checked +x;+y and +x;-y movemet with samall code:
G91 G1 H2 X10 F3000the direction of motions are good, according to documentation:
https://docs.duet3d.com/User_manual/Machine_configuration/Configuration_coreXY)thanks, JR
-
What firmware version were you running on the previous board?
At this point I would suggest you update the firmware on the board and generate a new set of config files using the online configurator.
https://docs.duet3d.com/en/User_manual/RepRapFirmware/Updating_firmware
https://configtool.reprapfirmware.org/Heaters
And treat it like a new printer build and go through commissioning.