Super strong NEMA17 actuator w/o gearbox
-
Hi gents,
after seeing this "jumping squirrel robot" video from Pintobotics, ( https://youtu.be/yWZ1tI-fphQ from 13:00 )
I made my own Cord-Wrangler and lifted 5kg with a NEMA17 at 24V/1.2A.
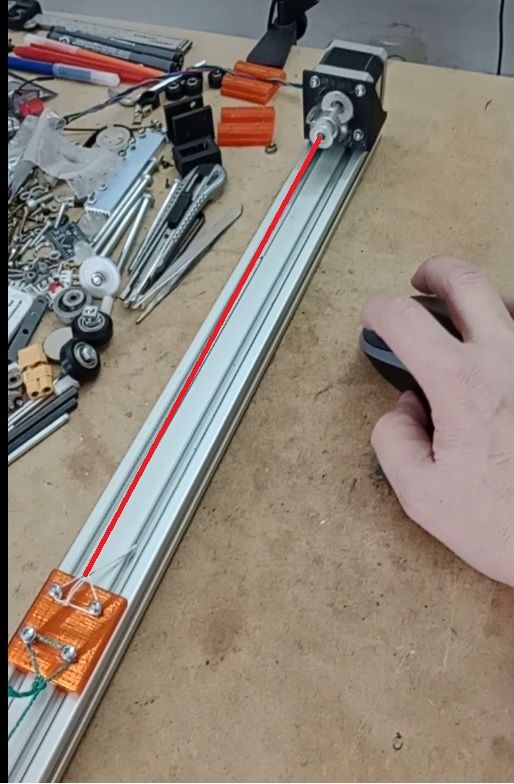
Here's a short video of it.
Has anyone seen this method before? Is it worth investigating, which cord is best?
THX for reading
Olaf//edit corrected the video link THX Ian
-
@o_lampe Nice! But I think you meant this video for the first link: https://youtu.be/yWZ1tI-fphQ
Ian
-
A little follow up:
the guy from Pintobotics contacted me and directed me to his twisted string experiment.
The motion is nonlinear, but his equations made it possible to predict motion.