To build another printer or not !
-
Hi ,
I've been toying with the idea for some time now . My current build has reach it limit I believe . I kinda want a faster printer as well and 48v for stepper motor . My duet 3 only does 32v max , I know the newest one do 48v, that a pretty big step up in torq right there . Not sure what hotend to go with , I do like the mosquito one .
Core xy design as well
2 power supply a 24v for heater and fan , 48v for mobo and stepper motor .
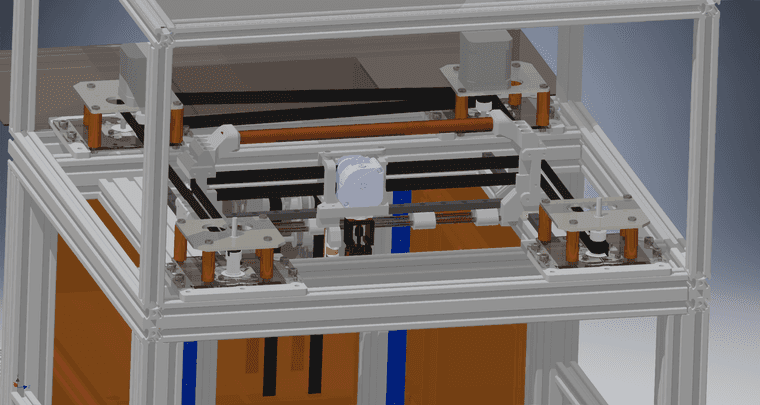
Build area about 250x250x250 , fully enclosed , designed to have the spool within the heated area . Ldo stepper motor 1.8 super powerful one , low inductance max 180 degree , AWD for xy axis .
Overal foot print of the machine , 600x700x800
Belted z axis , non-issue with z bending there .
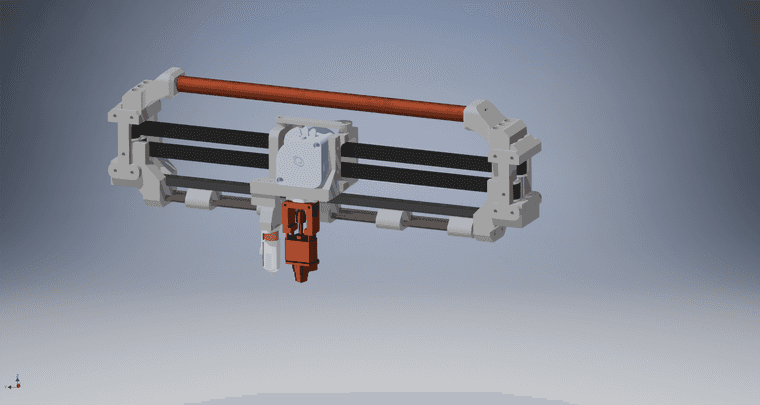
Build with aluminum extrusions 2020,2040,2060,4040 , extra H shape design on gantry base for maximum stiffness and squareness.Bl touch as well .  image url) )
image url) ) -
Side views  image url)
image url) -
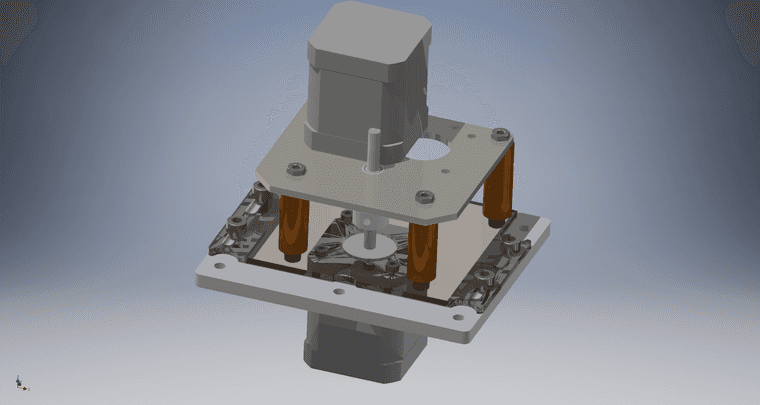
just updating a few things , redesigned my motor mount so that they slide on a U shaped plate attached to the frame making it easy to adjust tension , so that the shaft can be supported with a bearing on the other end , added 5mm carbon fiber rod to support mgn9 rail , giving it a triangle shape like a beam . Since this build all about speed , xy axis is powered by 6 stepper ,
-
@Dad003 6 steppers? If you want high speed and quiet operation, use just two servomotors instead of 6 steppers. Electronics will be simpler and probably cheaper, and it will work better.
I use some cheap 24V, 78W, Chinese servos in my corexy sand table and it can run at 1500 mm/sec. If I installed larger drive pulleys, it could go much faster. Those servos aren't very good for 3D printing (I've tried) , but there are better ones that are. Look at Clearpath. Servomotors can give more than adequate torque to move a 3D printer mechanism at 3000 rpm.
At high speeds (anything over about 200 mm/sec) the belts hitting the pulley teeth are going to make zipping noise no matter what you do. For minimum noise, make the drive pulleys the only ones that the belt's teeth engage. Put twists in the belts so that smooth back of belt runs on smooth pulleys made from stacked ball bearings. Jerk and acceleration are also going to contribute to noise, especially if you want to print at very high speed. Every time a motor reverses direction it's going to go "bang".
I wouldn't use 24V for a bed heater. Why go to the expense of using a regulated power supply to power a resistor? Use line power with an SSR. The same goes for a chamber heater, especially if you want to print ABS.
For the belt lifted Z axis, I get great results from a 30:1 worm gear drive. It is as simple as you can get- the worm gear can't be back driven by the weight of the bed, so when power is cut the bed just sits there. It doesn't drop or move. No brakes, no messing around. Set the steps per mm and it just works. The Duet boards can drive the 24V NEMA-23 motor directly, so no additional motor drivers, wiring, and power supplies are needed. The gears in the drive are very high quality and don't produce any Z artifacts in the prints.

Will that footprint let the machine fit through doors?
-
The noise is not a concern To me , the z axis belt driven is what my actual printer run and it doesn't need any brake , the bed doesn't move even when there no power but then the pulley are 20>60,20>60,20 . Just to move it down by hand you have to considerably put a lot of weight.
All heater will be run on a fast switching SSR. https://www.auberins.com/index.php?main_page=product_info&cPath=2_30&products_id=860
Bed will either be 24 or 48v , but the main mobo will be 48v for sure
-
 undefined Dad003 referenced this topic
undefined Dad003 referenced this topic