Upgrade from Duet 2 wifi to Duet 3 6hc config Issues
-
@Alijambo73 Could this have anything to do with the Z-probe? I havent connected it to the board yet.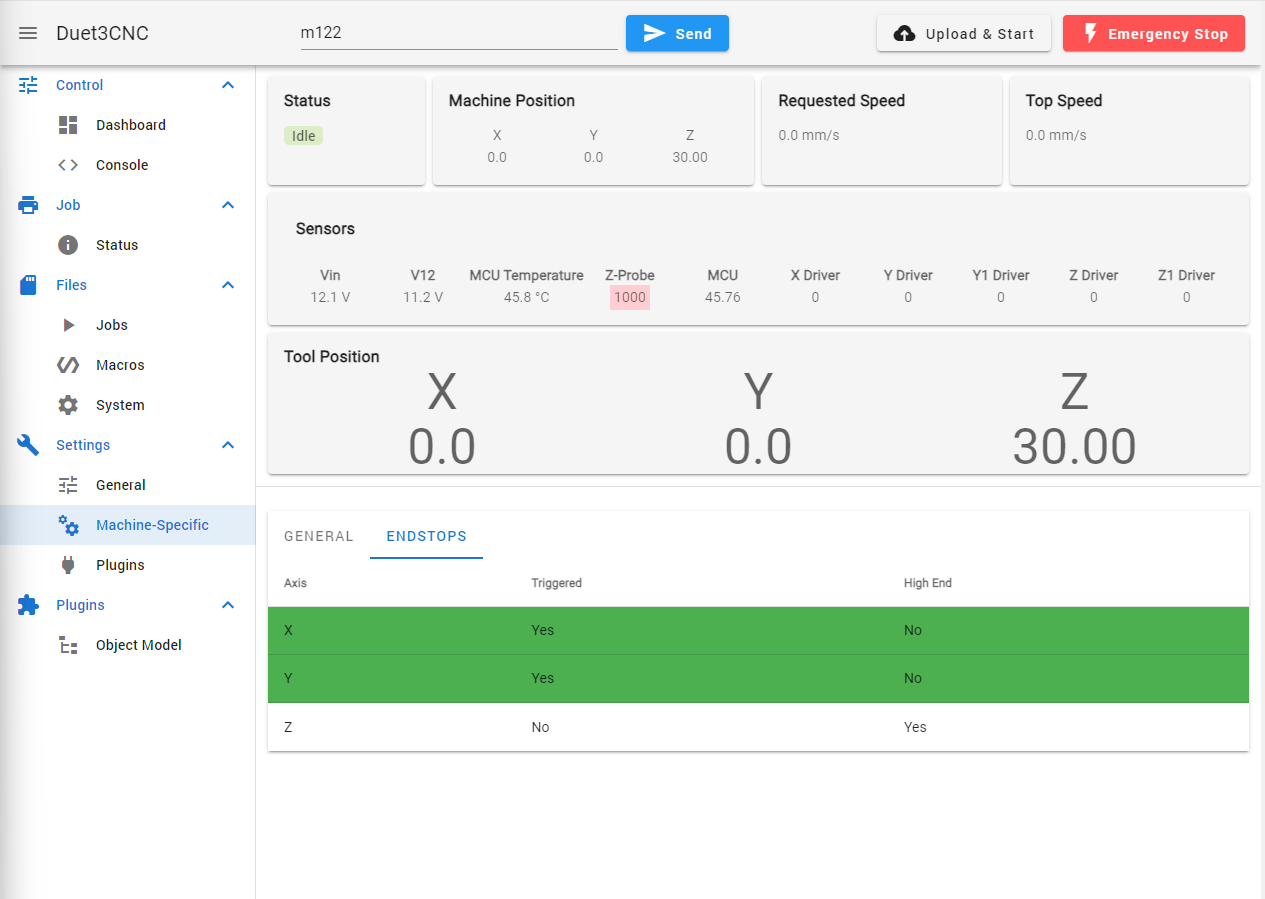
-
@Phaedrux how do I find the macros file the errors is referring to?
-
@Alijambo73 Your Z-Probe is reading 1000, which means it is already triggered, and G30 won't work because it will see that the probe is already triggered. You won't get a sensible reading, going from 0 (not triggered) to 1000 (triggered) if you haven't connected the probe yet.
Are your X and Y endstops connected? If the endstop plugin is saying they are triggered, are the X and Y axes actually touching them? Or are they incorrectly reporting triggered when they are not?
how do I find the macros file the errors is referring to?
RepRapFirmware does not currently return the name of the macro that reports an error (though this is a feature request). However, it's pretty clear it's the homez.g macro. When homing with G30, X and Y MUST be homed first. But then, without the probe connected, G30 isn't going to work either.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts I have 5 endstops that are all switches. 1 on x 2 on y and 2 on z.
When I use the end stop monitor plug in they all seem to be working correctly. The screenshot shows that x and y are homed which was correct. I can manually trigger the 2 end stops Z and see that thay appear to be working too.
I have a probe to find 0 on the material. The 2 endstops used to home z are set to find the high end.
I'm thinking there is something in the config of the touchplate probe that is incorrect. I commented out the probe but the behavior remained the same.
Can you see where I have made a mistake with between the endstops and touch plate probe?
-
@Alijambo73 What type is your z probe? Is it like a switch?
-
@Alijambo73 Your home Z uses G30 to home, which is using the probe, not the Z endstops. If you want to use the Z endstops, you need to change homez.g to use them. Currently in homez.g you have:
; homez.g ; called to home the Z axis ; ; generated by RepRapFirmware Configuration Tool v3.5.4 on Mon Sep 09 2024 22:47:08 GMT-0600 (Mountain Daylight Time) ; increase Z G91 ; relative positioning G1 H2 Z5 ; move Z relative to current position to avoid dragging nozzle over the bed G90 ; absolute positioning ; home Z var xCenter = move.compensation.probeGrid.mins[0] + (move.compensation.probeGrid.maxs[0] - move.compensation.probeGrid.mins[0]) / 2 - sensors.probes[0].offsets[0] var yCenter = move.compensation.probeGrid.mins[1] + (move.compensation.probeGrid.maxs[1] - move.compensation.probeGrid.mins[1]) / 2 - sensors.probes[0].offsets[1] G1 X{var.xCenter} Y{var.yCenter} F7200 ; go to bed centre G30 ; probe the bedChange it to:
; home Z var zTravel = move.axes[2].max - move.axes[2].min + 5 ; calculate how far Z can travel plus 5mm G91 ; relative positioning G1 H1 Z{-var.zTravel} F600 ; coarse home in the -Z direction G1 H2 Z5 F6000 ; move back 5mm G1 H1 Z-10 F300 ; fine home in the -Z direction G90 ; absolute positioningYou will need to change the 'home Z' section of homeall.g too. You should also be able to home Z without having to home X and Y first.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts I'm using a touch plate like this.

-
@Alijambo73 You want to use a probe like that for setting tool offsets, not for homing the Z axis. Please try what I suggest in my last post.
Note that those type of probes are not much good for setting work offsets in X and Y. This type of probe is better: https://ooznest.co.uk/product/original-workbee-xyz-touch-probe/
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts on my duet 2 board this all worked fine and I used the probe to determine 0 for the work peice while the microswitches were used for homing z.
I have changed the homez and homeall but still getting the 2 errors
Error: in file macro line 14: G1: target position outside machine limits
Error: in file macro line 14: G1: insufficient axes homed
This is how they read now.
Home z.g
; home Z var zTravel = move.axes[2].max - move.axes[2].min + 5 ; calculate how far Z can travel plus 5mm G91 ; relative positioning G1 H1 Z{-var.zTravel} F600 ; coarse home in the -Z direction G1 H2 Z5 F6000 ; move back 5mm G1 H1 Z-10 F300 ; fine home in the -Z direction G90 ; absolute positioninghomeall.g
; homeall.g ; called to home all axes ; ; generated by RepRapFirmware Configuration Tool v3.5.4 on Mon Sep 09 2024 22:47:08 GMT-0600 (Mountain Daylight Time) ; increase Z G91 ; relative positioning G1 H2 Z5 F7200 ; move Z relative to current position to avoid dragging nozzle over the bed G90 ; absolute positioning ; home XY var xTravel = move.axes[0].max - move.axes[0].min + 5 ; calculate how far X can travel plus 5mm var yTravel = move.axes[1].max - move.axes[1].min + 5 ; calculate how far Y can travel plus 5mm G91 ; relative positioning G1 H1 X{-var.xTravel} Y{-var.yTravel} F6000 ; coarse home in the -X and -Y directions G1 H2 X5 Y5 F7200 ; move back 5mm G1 H1 X{-var.xTravel} Y{-var.yTravel} F300 ; fine home in the -X and -Y directions G90 ; absolute positioning ; home Z var zTravel = move.axes[2].max - move.axes[2].min + 5 ; calculate how far Z can travel plus 5mm G91 ; relative positioning G1 H1 Z{-var.zTravel} F600 ; coarse home in the -Z direction G1 H2 Z5 F6000 ; move back 5mm G1 H1 Z-10 F300 ; fine home in the -Z direction G90 ; absolute positioning -
@Alijambo73 Can you describe, from turning on the machine, exactly what you are doing, and post all the responses coming back from the console? ie of the two errors you report above, which is from running homez.g, and which is from running homeall.g?
Somehow, it seems some other macro is being called, and it's that macro that has got the error in it. Please could you zip your whole sys folder (so it has all the files) from your SD card and post it here? If you add '.txt' to the end after .zip, you should be able to upload it to the forum.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts after power up if I use home z I get " Error: in file macro line 14: G1: insufficient axes homed"
If I then home x and y, then use home z i get "Error: in file macro line 14: G1: target position outside machine limits"
After power up if I hit homeall (this is new) it will home correctly but then if I try to lower Z by -25 it tries to raise z even though the endstops are triggered.
This just keeps getting more weird.
-
@Alijambo73 said in Upgrade from Duet 2 wifi to Duet 3 6hc config Issues:
after power up if I use home z I get " Error: in file macro line 14: G1: insufficient axes homed"
This is normal if homeZ uses the Z probe to home, because you would be probing at a random position, possibly off the bed.
If I then home x and y, then use home z i get "Error: in file macro line 14: G1: target position outside machine limits"
You are doing this:
var xCenter = move.compensation.probeGrid.mins[0] + (move.compensation.probeGrid.maxs[0] - move.compensation.probeGrid.mins[0]) / 2 - sensors.probes[0].offsets[0] var yCenter = move.compensation.probeGrid.mins[1] + (move.compensation.probeGrid.maxs[1] - move.compensation.probeGrid.mins[1]) / 2 - sensors.probes[0].offsets[1] G1 X{var.xCenter} Y{var.yCenter} F7200 ; go to bed centreMy guess is that the calculation of yCenter and/or xCenter is going wrong. Have you set up the grid in config.g? Why not use bed centre calculated from the M208 limits instead?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 I don't want it to use the center of the bed. I want the z to home at x0 y0.
I inverted the zprobe and it now reads 0 in DWC and I changed this lineG1 H1 Z{-var.zTravel} F600 ; coarse home in the -Z directionto
G1 H1 Z{var.zTravel} F600 ; coarse home in the -Z directionI also reversed the direction on the Z steppers and now the homeall seems works correctly.
If I try to just home Z i get "G28 Z
Error: Failed to home axes Z"Here is the homeall.g that is working
; homeall.g ; called to home all axes ; ; generated by RepRapFirmware Configuration Tool v3.5.4 on Mon Sep 09 2024 22:47:08 GMT-0600 (Mountain Daylight Time) ; increase Z G91 ; relative positioning G1 H2 Z5 F7200 ; move Z relative to current position to avoid dragging nozzle over the bed G90 ; absolute positioning ; home XY var xTravel = move.axes[0].max - move.axes[0].min + 5 ; calculate how far X can travel plus 5mm var yTravel = move.axes[1].max - move.axes[1].min + 5 ; calculate how far Y can travel plus 5mm G91 ; relative positioning G1 H1 X{-var.xTravel} Y{-var.yTravel} F6000 ; coarse home in the -X and -Y directions G1 H2 X5 Y5 F7200 ; move back 5mm G1 H1 X{-var.xTravel} Y{-var.yTravel} F300 ; fine home in the -X and -Y directions G90 ; absolute positioning ; home Z var zTravel = move.axes[2].max - move.axes[2].min + 5 ; calculate how far Z can travel plus 5mm G91 ; relative positioning G1 H1 Z{var.zTravel} F600 ; coarse home in the -Z direction G1 H2 Z5 F6000 ; move back 5mm G1 H1 Z-10 F300 ; fine home in the -Z direction G90 ; absolute positioningHere is the homez.g that is giving the error
; home Z G91 ; relative positioning var maxTravel = move.axes[2].max - move.axes[2].min + 5 ; calculate how far Z can travel plus 5mm G1 H1 Z{var.maxTravel} F600 ; coarse home in the +Z direction G1 Z-5 F6000 ; move back 5mm G1 H1 Z{var.maxTravel} F300 ; fine home in the +Z direction G90 ; absolute positioning -
@Alijambo73 said in Upgrade from Duet 2 wifi to Duet 3 6hc config Issues:
G1 H1 Z{var.zTravel} F600
@Alijambo73 said in Upgrade from Duet 2 wifi to Duet 3 6hc config Issues:
G1 H1 Z{var.maxTravel} F600
Do you see the difference?
-
@Phaedrux That was it. Thank you for your help.