[3.5.3-SBC] Closed loop position recovery / rehoming
-
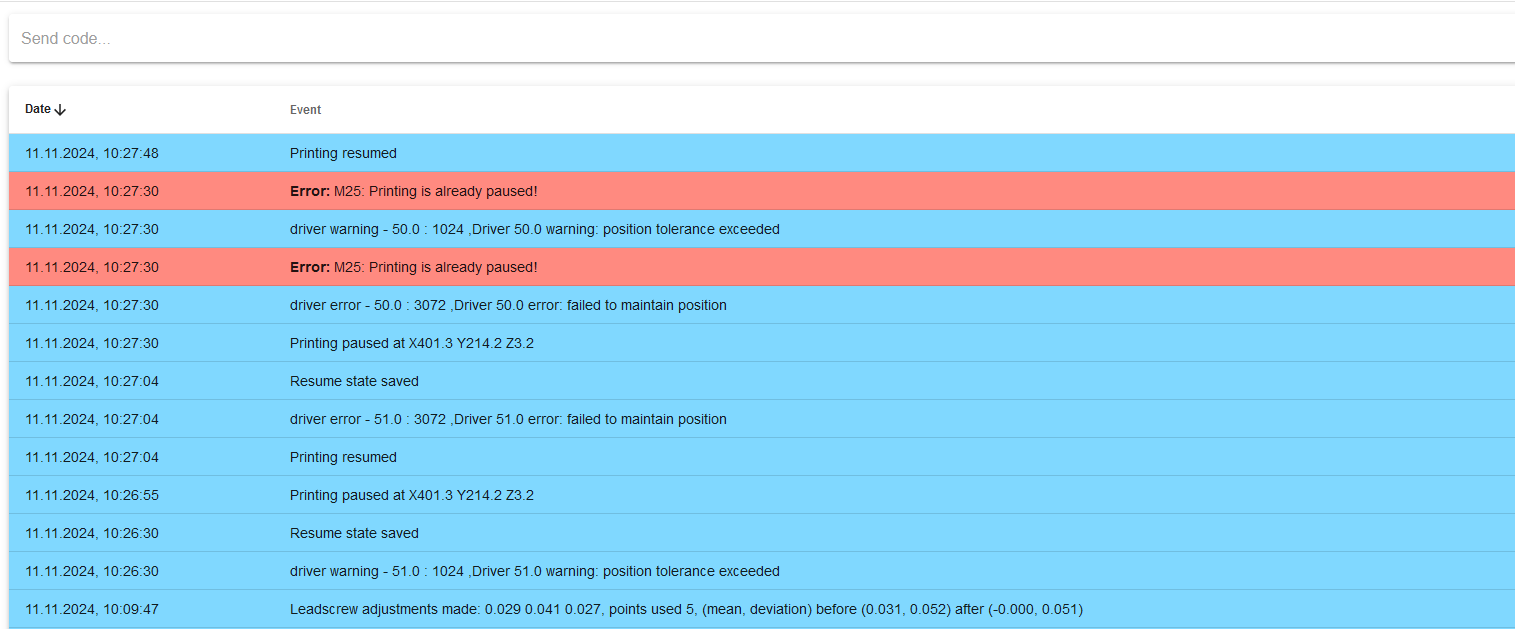
Hello, I am having the following issue with my closed-loop printer in an SBC configuration using CoreXY when a ‘position error’ occurs. I get a motor driver-warning event for each motor, 2 in total, and 1 driver-error event for each motor, again 2 in total, for a total of 4 events for a full crash.
content of driver-warning.g
; driver warning - 51.0 : 1024 ,Driver 51.0 warning: position tolerance exceeded if param.B > 0 && param.D == 0 && param.P == 1024 && move.axes[0].homed == false && move.axes[1].homed == false M99 ; ignore warning when drives are not homed echo "driver warning - "^{param.B}^"."^{param.D}^" : "^{param.P}^" ,"^{param.S} if !exists(global.event_driver_stall) global event_driver_stall = true ; check if a printjob is running ; if it is a can connected driver in closed loop mode with error position tolerance exceeded (param.B > 0 && param.D == 0 && param.P == 1024) if job.file.fileName != null if param.B > 0 && param.D == 0 && param.P == 1024 set global.event_driver_stall = true M25 ; pause print and rehome X and Y M207 Z{tools[0].retraction.zHop+0.2} ; raise z-hop 0.2mm to prevent further crashes M24 ; resume print else set global.event_driver_stall = false ; do not rehome while pausing G91 ; relative positioning G1 H2 Z0.5 F600 ; lift Z relative to current position M568 P0 R0 S0 A0 ; disable hotend M25 ; pause printcontent of driver-error.g
; driver-stall.g ; called to home x and y after stall detection ; driver error - 51.0 : 3072 ,Driver 51.0 error: failed to maintain position if param.B > 0 && param.D == 0 && param.P == 3072 && move.axes[0].homed == false && move.axes[1].homed == false M99 ; ignore warning when drives are not homed echo "driver error - "^{param.B}^"."^{param.D}^" : "^{param.P}^" ,"^{param.S} if !exists(global.event_driver_stall) global event_driver_stall = true ; check if a printjob is running ; if it is a can connected driver in closed loop mode with failed to maintain position (param.B > 0 && param.D == 0 && param.P == 3072) if job.file.fileName != null if param.B > 0 && param.D == 0 && param.P == 3072 set global.event_driver_stall = true M207 Z{tools[0].retraction.zHop+0.2} ; raise z-hop 0.2mm to prevent further crashes else set global.event_driver_stall = false ; do not rehome while pausing G91 ; relative positioning G1 H2 Z0.5 F600 ; lift Z relative to current position M568 P0 R0 S0 A0 ; disable hotend M25 ; pause printI have already tried to check if the printer is in the ‘pausing’ or ‘paused’ state to prevent further pauses, but the events are deferred and the first event is processed completely, including the resume print, before the second is processed.
if state.status == "paused" || state.status == "pausing" || state.status == "resuming" M99 ; ignore this event - it is already handledHow can I cancle pending events? or what else should I do?
-
I came up with the following solution:
content of driver-warning.g
; driver-warning.g ; driver warning - 51.0 : 1024 ,Driver 51.0 warning: position tolerance exceeded if param.B > 0 && param.D == 0 && param.P == 1024 && move.axes[0].homed == false && move.axes[1].homed == false M99 ; ignore warning when drives are not homed echo "driver warning - "^{param.B}^"."^{param.D}^" : "^{param.P}^" ,"^{param.S} if state.status == "paused" || state.status == "pausing" || state.status == "resuming" M99 ; ignore this event - it is already handled if !exists(global.event_driver_stall) global event_driver_stall = true ; check if a printjob is running ; if it is a can connected driver in closed loop mode with error position tolerance exceeded (param.B > 0 && param.D == 0 && param.P == 1024) if job.file.fileName != null if param.B > 0 && param.D == 0 && param.P == 1024 set global.event_driver_stall = true M25 ; pause print and rehome X and Y M207 Z{tools[0].retraction.zHop+0.2} ; raise z-hop 0.2mm to prevent further crashes set global.resume_deferred = state.upTime + 5 ; resume print after 5 seconds else set global.event_driver_stall = false ; do not rehome while pausing G91 ; relative positioning G1 H2 Z0.5 F600 ; lift Z relative to current position M568 P0 R0 S0 A0 ; disable hotend M25 ; pause printcontent of driver-error.g
; driver-error.g ; called to home x and y after stall detection ; driver error - 51.0 : 3072 ,Driver 51.0 error: failed to maintain position if param.B > 0 && param.D == 0 && param.P == 3072 && move.axes[0].homed == false && move.axes[1].homed == false M99 ; ignore warning when drives are not homed echo "driver error - "^{param.B}^"."^{param.D}^" : "^{param.P}^" ,"^{param.S} if !exists(global.event_driver_stall) global event_driver_stall = true if state.status == "paused" || state.status == "pausing" || state.status == "resuming" set global.resume_deferred = 0 ; reset resume_deferred M99 ; ignore this event - it is already handled ; check if a printjob is running ; if it is a can connected driver in closed loop mode with failed to maintain position (param.B > 0 && param.D == 0 && param.P == 3072) if job.file.fileName != null if param.B > 0 && param.D == 0 && param.P == 3072 set global.event_driver_stall = true M207 Z{tools[0].retraction.zHop+0.2} ; raise z-hop 0.2mm to prevent further crashes else set global.event_driver_stall = false ; do not rehome while pausing G91 ; relative positioning G1 H2 Z0.5 F600 ; lift Z relative to current position M568 P0 R0 S0 A0 ; disable hotend M25 ; pause printcontent of daemon.g
if exists(global.resume_deferred) && global.resume_deferred > 0 && global.resume_deferred < state.upTime if state.status == "paused" set global.resume_deferred = 0 M24 ; resume printThe magic is done by the
global.resume_deferred. It is set tostate.upTime + 5which means 5 second delay.
The flow looks like the followingdriver-warning event -> check if it is already paused if so, exit else set resume_deferred driver-error event -> check if it is already paused, if so, reset resume_deferred to 0 to disable it and exit daemon.g -> Check whether the delay for resume_deferred has already passed, if so resume the print.