Bltouch not always triggering during bed probe
-
Our bltouch started randomly stopping mid probe. Sometimes its on the first probe, sometimes later but it never finishes the entire bed anymore. Also sometimes its seems to lag between probe moves occasionally. The probe used work but seems to have slowly gotten worse over time to where now its 50/50 whether the pin will retract or not.
I'm guessing it may be a wiring issues or something with the probe itself? Its fairly large printer with a long run for the cable from the hotend to the mainboard, could interference be a problem?
; Z-Probe M950 S0 C"exp.heater3" ; create servo pin 0 for BLTouch M558 P9 C"^zprobe.in" H5 F200 R0.2 T15000 ; set Z probe type to bltouch and the dive height + speeds G31 P25 X-14.9 Y-30.5 Z0.9 ; set Z probe trigger value, offset and trigger height M557 X0:335 Y0:300 P4 ; define mesh grid M376 H10 ; Set bed compensation taperI have a video of the problem but not enough reputation to posy it yet.
-
@emofes I've given you some reputation, so you can now post links.
Is the BLTouch in a heated chamber? They are quite susceptible to heat, which causes them to fail. Otherwise, check the wiring for loose connections. It's also possible that the wires have fatigued with the motion of the printer, and need to be replaced.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts its on old Fusion3 F410. The chamber is not actively heated but the printer is enclosed and we sometimes times run the bed up to 100°C. It doesn't have issues resetting the probe or running the stow, deploy, or self test commands. I will check the wiring connections today.
-
@emofes From your video, I'd say the issue was with the probe. The Z seems to stop when the probe is triggered, and the probe retracts on the first three probe attempts. On the third probe, there does seem to be a delay before probe moves on. On the fourth probe, the Z stops when the probe is triggered, but the pin doesn't retract, and the probe goes into fault mode. I think the pin is probably sticking, or needs adjustment. From this page: https://www.3dprintbeast.com/bltouch-blinking-red/
The BLTouch can blink red in two different patterns, where the blinking is fast in one (50% uptime of the LED) and slow in the other (80% uptime of the LED), with each pattern signaling a separate issue.
I'd say the error pattern is the first pattern. While it says this happens during self-test, it also happens during operation.
BLTouch Blinking Red Quickly
The first BLTouch red LED pattern that signifies an error is when the LED flashes quickly with an uptime of 50%.
A quickly flashing red LED on the BLTouch tells us that the BLTouch is in alarm mode due to failing the self-test process where the probe conducts the necessary checks before becoming ready.
As the BLTouch going into alarm mode can be a result of many different things that go wrong during the self-test process, here is a list of the common culprits that accommodate most cases but isn’t exhaustive:
- Obstruction of the pin, causing it to be incapable of moving up and down freely, which can be due to either internal factors (damaged probe) or external factors (dust, dirt, etc.)
- The pin hitting the build plate
- Issues with the homing of the Z-axis, such as the speed being too slow
- Physical damage to the probe, preventing the pin from functioning correctly
- Firmware issues
- Defective probe
While this list isn’t exhaustive by any means, as we have mentioned, it should give you a good idea of why the probe can go into alarm mode.
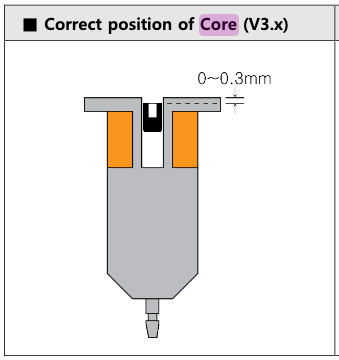
You can also adjust the 'core'. There isn't much explanation about what this does, though. See https://www.antclabs.com/_files/ugd/f5a1c8_d40d077cf5c24918bd25b6524f649f11.pdf
If push-pin deploy fails, turn the core by up to 180 degrees with an Allen-key so that the core is further inside the casing.
Perhaps if the opposite is true, ie fails to retract, unscrew the core 180 degrees so it is nearer the top.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts Thanks Ian, I will mess with the pin and see if that does anything. I also have a cr touch and knockoff bltouch at home I can test out or swap the pins from.