Having a hard time geting my printer and Duet Wifi to behave
-
This type of problem is usually caused by incorrect endstop configuration. Are your endstop switches at/near the low end (X=0, Y=0) ends of the axes, or at/near the high (X=260, Y=240) ends?
-
Hi
Yes that has been my main thesis. My end stop are all in the low pos and they respond when touched. Probe is also responding even thou first analog value is at aprox. 0.4.
I have tried to turn of all other end stops in the machine but haven’t succeeded for E0:E1. They are activated in the Machine properties.
I always have the head error on X and Y.
Even thou I struggle I want to thank you for an amazing piece of hardware. Totally configurable and silent, Very nice.
-
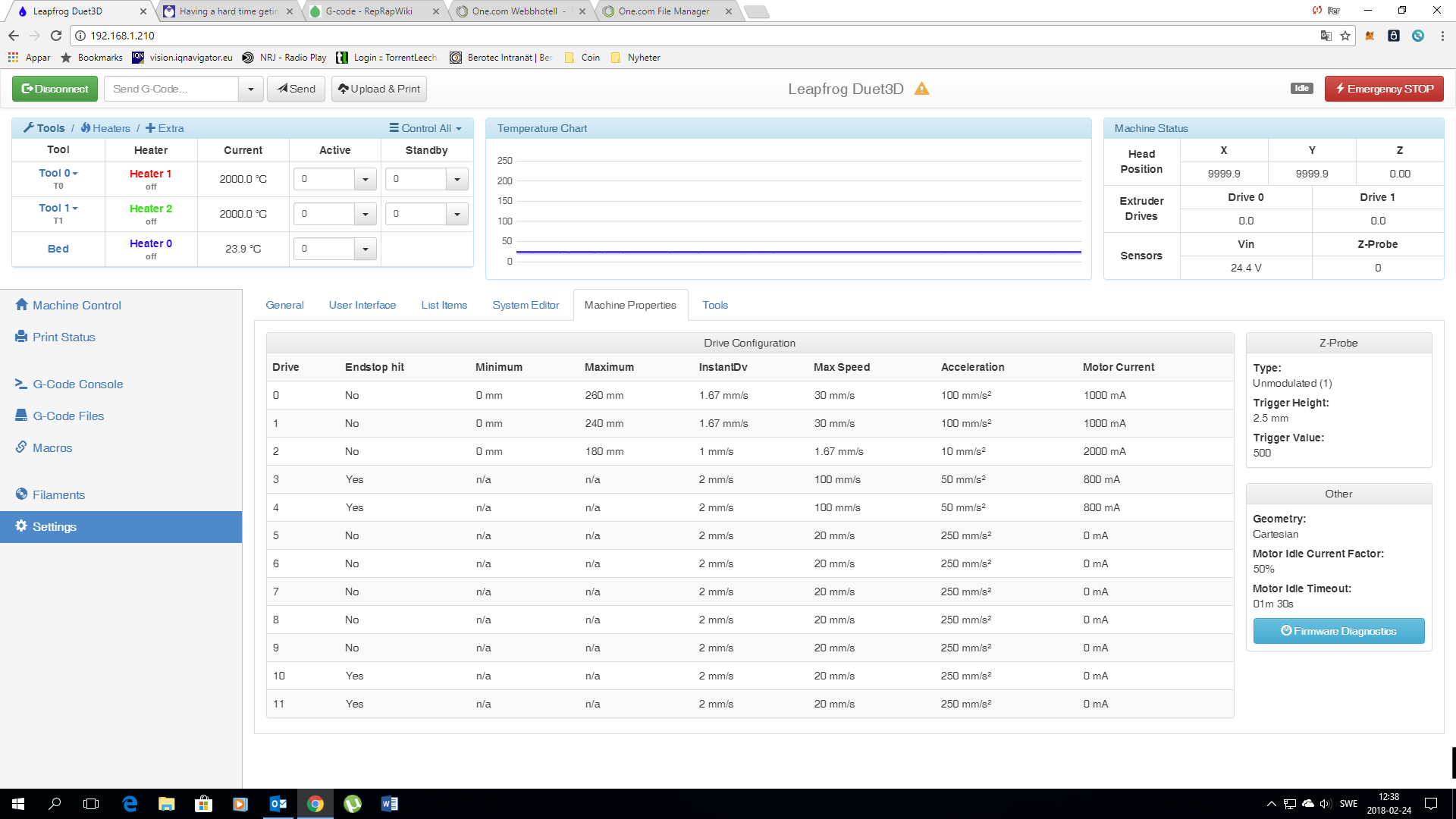
The odd thing about that image is that the X and Y positions are both showing as 9999.9. That's not normal. Once the printer has been homed, limit checking is applied by default; but the firmware thinks the head is already outside limits, which probably explains why it won't accept move commands.
When you use G1 S2 commands to move the X and Y axes, do they move in the correct directions?
Please post your homing files.
Which firmware version are you using?
-
Yes, the axes move correctly
; homex.g
; called to home the X axis
;
; generated by RepRapFirmware Configuration Tool on Sat Feb 24 2018 04:09:19 GMT+0100 (Västeuropa, normaltid)
G91 ; relative positioning
G1 S1 Z5 F1000 ; lift Z relative to current position
G1 S1 X-265 F1000 ; move quickly to X axis endstop and stop there (first pass)
G1 X5 F1000 ; go back a few mm
G1 S1 X-265 F360 ; move slowly to X axis endstop once more (second pass)
G1 Z-5 F1000 ; lower Z again
G90 ; absolute positioning; homey.g
; called to home the Y axis
;
; generated by RepRapFirmware Configuration Tool on Sat Feb 24 2018 04:09:19 GMT+0100 (Västeuropa, normaltid)
G91 ; relative positioning
G1 S1 Z5 F1000 ; lift Z relative to current position
G1 S1 Y-245 F1000 ; move quickly to Y axis endstop and stop there (first pass)
G1 Y5 F1000 ; go back a few mm
G1 S1 Y-245 F360 ; move slowly to Y axis endstop once more (second pass)
G1 Z-5 F1000 ; lower Z again
G90 ; absolute positioning; homez.g
; called to home the Z axis
;
; generated by RepRapFirmware Configuration Tool on Sat Feb 24 2018 04:09:19 GMT+0100 (Västeuropa, normaltid)
G91 ; relative positioning
G1 S1 Z5 F1000 ; lift Z relative to current position
G90 ; absolute positioning
G1 X15 Y15 F1000 ; go to first probe point
G30 ; home Z by probing the bed; Uncomment the following lines to lift Z after probing
;G91 ; relative positioning
;G1 Z5 F100 ; lift Z relative to current position
;G90 ; absolute positioningFirmware Name: RepRapFirmware for Duet WiFi
Firmware Electronics: Duet WiFi 1.0
Firmware Version: 1.20 (2017-12-23)
WiFi Server Version: 1.20
Web Interface Version: 1.20
Web Interface by Christian Hammacher
Licensed under the terms of the GPL v3 -
The homing macros also need to have S1 in them to create motion. So the macro halts half way thru since the later G1 commands does not have S1 or S2 in them.
I can run Z with G1 S0 Z100 F100 commands but it runs 100mm in less than one second so the motor naturally stalls with a short scream.
G92 X Y Z does not clear the X and Y pos error
When G28 Z is called I get errors from deploying the probe. That is a routine not used in my macros.
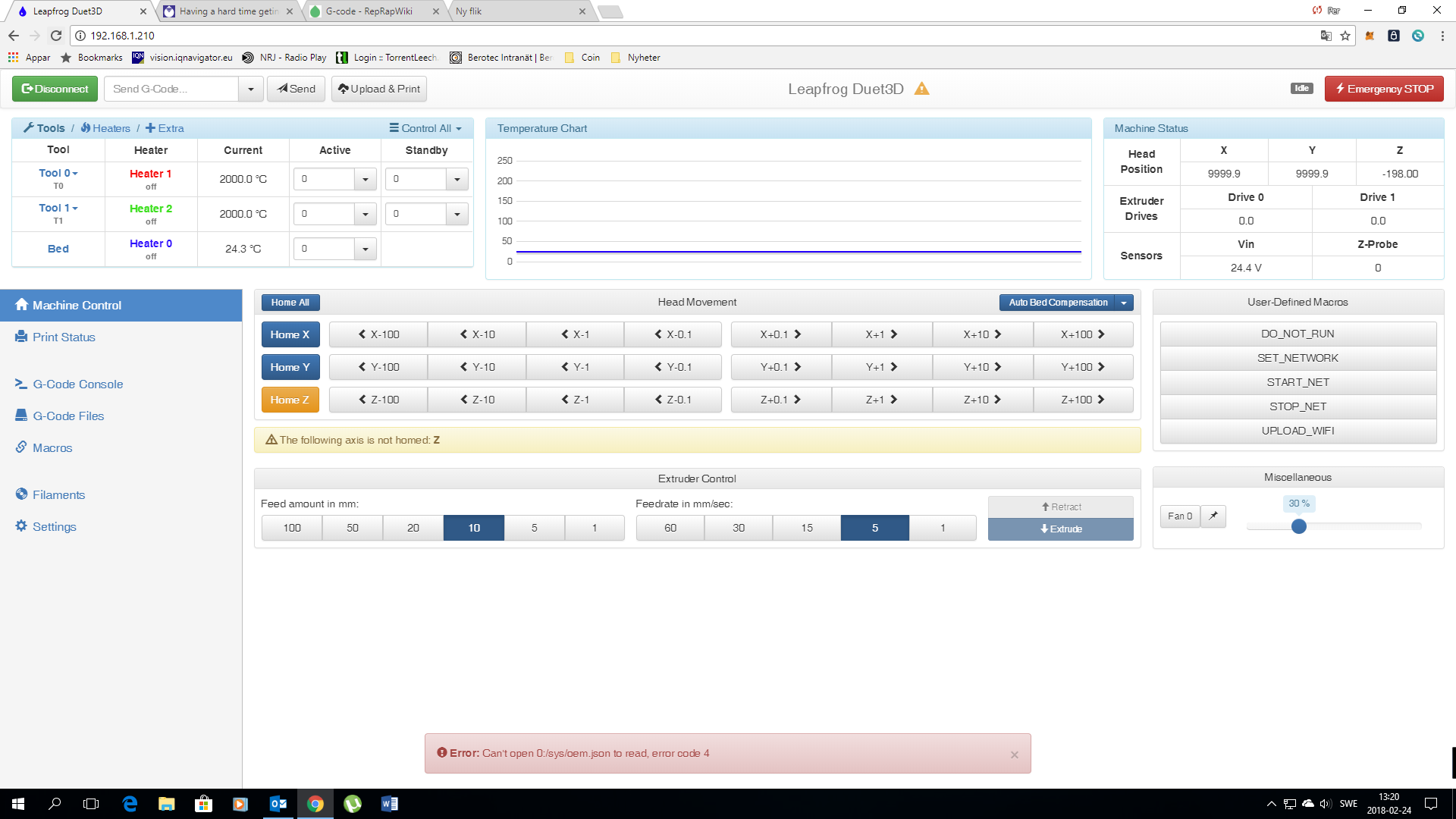
When refreshing the web interface with X and Y in the 0 pos i got this error.
-
You can ignore the "can't find oem.json" message, although the fact that you are getting it suggests that you have enabled debugging (M111).
Please try the following:
1. Run the following commands without any parameters, and check that the values they report match the values you specified in config.g:
M669 (should report that your printer is Cartesian)
M574
M208
M92
M5842. Restart the Duet and connect DWC. What X and Y head positions does DWC display?
3. Press the Home X button. When it finishes, what X and Y positions does DWC display?
4. Press the Home Y button. When it finishes, what X and Y positions does DWC display?
5. Repeat #1 again.
What I think is happening is that your X and Y steps/mm are somehow getting set to zero.
-
1. Run the following commands without any parameters, and check that the values they report match the values you specified in config.g:
M669 Kinematics is Cartesian
M574 X: low end active high switch, Y: low end active high switch, Z: low end Z probe
M208 Axis limits - X: 0.0 min, 260.0 max, Y: 0.0 min, 240.0 max, Z: 0.0 min, 180.0 max
M92 Steps/mm: X: 66.667, Y: 66.667, Z: 960.000, E: 120.000:120.000
M584 Driver assignments: X0 Y2 Z1 E3:4, 3 axes visibleAll good
2. Restart the Duet and connect DWC. What X and Y head positions does DWC display?
X9999.9 Y9999.93. Press the Home X button. When it finishes, what X and Y positions does DWC display?
X9999.9 Y9999.94. Press the Home Y button. When it finishes, what X and Y positions does DWC display?
X9999.9 Y9999.95. Repeat #1 again.
M669 Kinematics is Cartesian
M574 X: low end active high switch, Y: low end active high switch, Z: low end Z probe
M208 Axis limits - X: 0.0 min, 260.0 max, Y: 0.0 min, 240.0 max, Z: 0.0 min, 180.0 max
M92 Steps/mm: X: 66.667, Y: 66.667, Z: 960.000, E: 120.000:120.000
M584 Driver assignments: X0 Y2 Z1 E3:4, 3 axes visibleAll good
-
Please try changing S0 in your M556 command to a value greater than zero, or remove or comment out the M566 command completely. I think it may be causing a divide-by-zero error.
-
Good call! Have you considered a nano cryptocurrency wallet to accept small donations? After all you saved me endless of frustrating hours and did so on a Satuarday.
Thanks a million!
-
I'm glad it solved the problem. I've fixed the source code to avoid this happening in future releases.
I receive a share of the profits on Duet sales; so assuming you bought a genuine Duet from Duet3D or one of our distributors, there is no need for a donation - it's all part of the service.