@maxgyver Hi Max!
Glad to hear the boards are finally in the hands of users! I've been working on the firmware for these boards most recently, so I'll answer your points ")
-
I'll investigate that at some point this week. Cheers for flagging it - for now I've just amended the documentation. I've also added in something that I don't think was clear enough before - although the 1HCL boards do support the error thresholds, I do not believe the current mainboard firmware does anything with them once they are received. This is something that's on the cards, but hasn't quite been implemented yet in the mainboard firmware.
-
Ah yes - this is an interesting one - so the
M569.3&M569.4commands haven't been added by me as a part of the 1HCL closed loop stuff - I believe they have been added by a member of the community for use on a different board entirely. The otherM569.xcommands should all state which boards they are supported on (e.g.M569.5: "Only supported for drivers on Duet 3 closed loop driver boards that are configured in closed loop mode.") I'll chase up which boardsM569.3is supported on and then add them to the docs so it's clear. We have had conversations about implementingM569.3on the 1HCL board - but it's a fair way down our roadmap right now. -
The default state for the drivers is not to move. Only after a successful full tune (
M569.6 ... V31) should they move.
This is because closed loop systems have the potential to do much worse things that open loop ones if they are configured incorrectly (e.g. if you set a negative P term it will accelerate in the opposite direction to what you want, or an I term that's too large could result in unbounded oscillation)
This means that if the axis still doesn't move after tuning, the tuning was unsuccessful - I'll walk you through what to do in this instance in a sec.
What's more concerning to me is that sometimes it vibrates erratically. It shouldn't pass tuning unless it's pretty sure it will behave. In these instances, are the PID parameters set as you describe (R100 I0 D0)? (i.e. you've not maybe increased them to see if that makes any difference?)
When a tuning move has been unsuccessful (you runM569.6 ... V31and it doesn't move), it should report back how it was unsuccesful. Although you may need to go to the console tab down the left to see the full output. Please could you let me know what it reports back after runningM569.6 ... V31and I'll talk you through what to do. If, for whatever reason,M569.6isn't reporting anything back, please could you let me know the output ofM122 B50(Assuming the board is at address 50, as you give in your example). For future reference, the docs for this should be going up soon. -
Oops, the repo is private. I'll ask someone to change that
Edit: That's been changed now, hopefully you should be able to see it
Cheers,
Louis



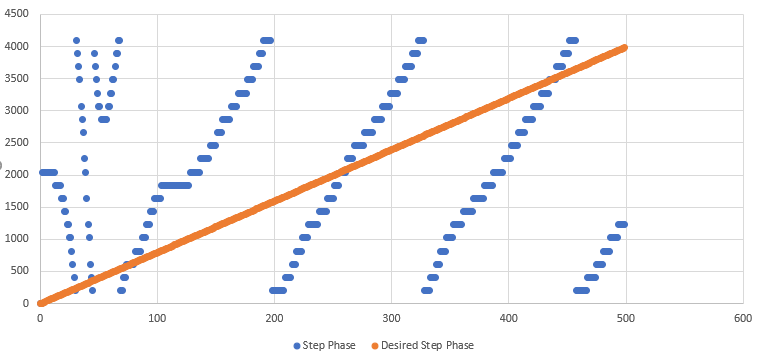
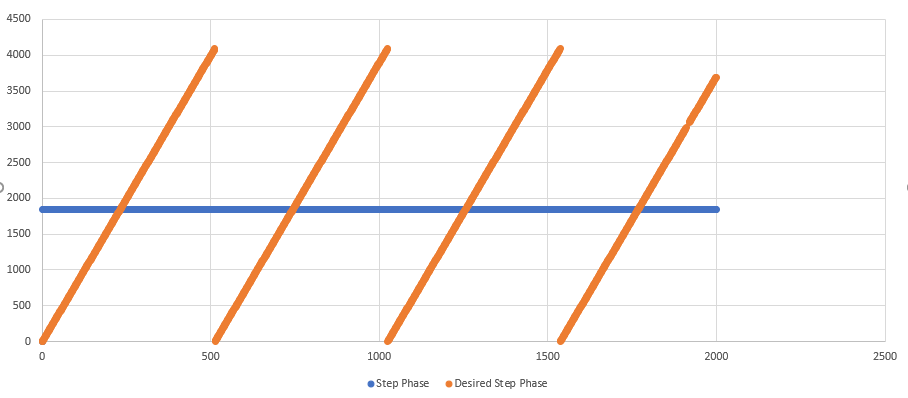
 do you mean that both motors are wired into the single driver output on the 1HCL? What exactly were the issues you were having with the recorded graph?
do you mean that both motors are wired into the single driver output on the 1HCL? What exactly were the issues you were having with the recorded graph? The prints also show a strong stepping pattern.
The prints also show a strong stepping pattern.