Good call, Just tried doing 20 degrees to see, no difference. Looking at the servo datasheet I'm seeing
Operating Travel: 40±5°/ONE SIDE PULSE TRAVELING 400usec
Direction: CLOCK WISE/PULSE TRAVELING 1500 TO 1900 usec
To try and eliminate variables I've also been using an Arduino driving a servo from 0-60°, it did seem to be driving the servo 60 degrees. I recreated the wiring diagram using an external variable power supply and confirmed I am able to drive the digital servo successfully using the voltage regulator and a relay. I confirmed this was true with analogs as well.
Meaning I only had the PWM pin connected to the arduino, and the voltage being driven elsewhere. Grounds were tied together for reference on a breadboard.
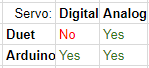
Again, with an arduino the digital servo and analogs commanded the correct move position every time
However, when I took this identical wiring arrangement, and only changing the PWM pin going into the PWM on the Duex, I am ONLY able to drive analog servos. The digital one continues to not move.
The only thing I can think of is the PWM frequency between the two devices is different. I'll probably hook it up to an osciloscope to see if I can see the frequency, but at this point I'm pretty compelled of the origin of the issue, and would be willing to go so far as to ship you a digital servo if necessary.