@JoergS5 Ok, thank you! I'll post here if I have any updates
Posts made by YuriConfessor
-
RE: 4 axis palletized robot arm (robot kinematics) for 3D printingposted in MultiAxis Printing
-
RE: 4 axis palletized robot arm (robot kinematics) for 3D printingposted in MultiAxis Printing
Hello guys, I've been able to include the DH parameters directly to the gcode by creating a slicer using grasshopper. But this solution is not pratical in any form. @JoergS5 is it possible to launch a firmware with the DH enabled on the K13 so I can figure the robot directly on the config file? I'm using a cartesian kinematics and tricking the machine with the gcode. Here is a short video of it "building" a cillinder: lRobot kinda working
-
RE: Multiaxis verifying endpoint position and orientationposted in MultiAxis Printing
@dc42 I'm prototyping a "3d bed" for calibrating the arm. The problem is the "donut shaped" movement, but i think I can make something that can be used to calibrated. In the next week or so I'll post it so everyone can help improve it
-
RE: Robotic kinematicsposted in MultiAxis Printing
@JoergS5 I'm reading the discussion so I can know what kind of progress have already been made.
I've noticed that the robot viewer is not avaiable anymore, is there any specific reason for that?
-
RE: 4 axis palletized robot arm (robot kinematics) for 3D printingposted in MultiAxis Printing
@JoergS5 I think I can probably help with it, just need to understand what progress you've made so far and learn a little bit better about RRF microcontrollers
-
RE: 4 axis palletized robot arm (robot kinematics) for 3D printingposted in MultiAxis Printing
@JoergS5 said in 4 axis palletized robot arm (robot kinematics) for 3D printing:
That's interesting. I implement the kinematics with screw theory, but for more complex problems like 6 arm industrial robots I use geometric algebra (eg calculating intersections of two circles of two robot arms). Some ideas like quaternion based slerp for a velocity constant rotation of AC axes is part of geometric algebra, so I want to base a segmentation calculation on this theory. This is however not part of the kinematics, but of the core RRF.
For geometric algebra I use the conformal geometric algebra, originated from Hestenes.I will try to deepen my knowledge of algebra so that it can be applied to robotics. I confess that I have only used it within the study of physics, so I am excited to be able to apply my learning in a more practical way. I have heard of Hestenes; during my undergraduate studies, I was recommended one of his books, "Clifford Algebra to Geometric Calculus".
-
RE: 4 axis palletized robot arm (robot kinematics) for 3D printingposted in MultiAxis Printing
@JoergS5 I'm not familiar with screw theory, but I've been reading about it in the Duet3D documentation and searching for relevant papers. I have a strong understanding of geometric algebra, as I am completing my physics degree.
-
RE: 4 axis palletized robot arm (robot kinematics) for 3D printingposted in MultiAxis Printing
@JoergS5 Ok, I'll wait for it then. If there's something I can help with please let me know
-
RE: 4 axis palletized robot arm (robot kinematics) for 3D printingposted in MultiAxis Printing
@JoergS5 When can we start testing?
-
RE: 4 axis palletized robot arm (robot kinematics) for 3D printingposted in MultiAxis Printing
It was a problem with the e-mail confirmation, now I'am able to reply.
-
4 axis palletized robot arm (robot kinematics) for 3D printingposted in MultiAxis Printing
Hello everyone,
I hope this message finds you well. I am currently embarking on a project involving a 4-axis palletized robot, and I've come across some valuable information in this forum regarding its programming. It seems like there's a collective effort to finalize the details, and I am eager to contribute and become a tester for this exciting endeavor.
Having reviewed the existing discussions, I understand that the project is in the development phase, and there is a need for testers to help refine the software. I would like to express my interest in joining the efforts to bring this 4-axis palletized robot project to fruition.
I have a background in 3d printing and programing grasshopper to slice for robotic arms, and I believe I can bring a unique perspective to the testing process. Additionally, I am keen on contributing to the software development aspect of the project. Collaboration is key in such undertakings, and I am enthusiastic about working alongside the community to ensure the success of this initiative.
If there are specific steps or tasks that need to be completed for testing purposes, please guide me on how I can get involved. I am committed to dedicating time and effort to assist in refining the software and providing valuable feedback.
Looking forward to being part of this innovative project and contributing to its success. Please feel free to reach out if there are further details or specific requirements.
Thank you, and let's build something amazing together!
Best regards,
YuriConfessorEdit: Adding a picture of the model of the robot
This one is from JoergS5 documentation
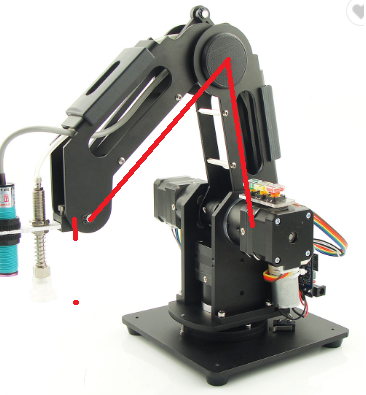
This one is the robot that I have with me:
