unusual/unnerving noises + error codes
-
If you're still having problems with the probe please post your config.g.
-
@Phaedrux
; Configuration file for Duet WiFi (firmware version 1.21)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.1.4 on Tue Sep 15 2020 08:55:40 GMT+0100 (British Summer Time); General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"Duet 2 Wifi" ; set printer name; Network
M552 S1 ; enable network
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet; Drives
M569 P0 S0 ; physical drive 0 goes backwards
M569 P1 S1 ; physical drive 1 goes backwards
M569 P2 S1 ; physical drive 2 goes forwards
M569 P3 S1 ; physical drive 3 goes forwards
M584 X0 Y1 Z2 E3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z400.00 E93.00 ; set steps per mm
M566 X1200.00 Y1200.00 Z24.00 E300.00 ; set maximum instantaneous speed changes (mm/min)
M203 X30000.00 Y30000.00 Z300.00 E1500.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z100.00 E5000.00 ; set accelerations (mm/s^2)
M906 X400 Y400 Z400 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S300 ; Set idle timeout; Axis Limits
M208 X-5.5 Y-10 Z0 S1 ; set axis minima
M208 X220 Y220 Z250 S0 ; set axis maxima; Endstops
;M574 X1 Y1 S3 ; set endstops controlled by motor stall detection
;M574 Z1 S2 ; set endstops controlled by probe; Endstops
M574 X1 S1 P"xstop" ; configure active-high endstop for low end on X via pin xstop
M574 Y1 S1 P"ystop" ; configure active-high endstop for low end on Y via pin ystop; Z-Probe
M307 H64 A-1 C-1 D-1 ; disable heater on PWM channel for BLTouch
M558 P9 H2.5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
G31 P25 X-31 Y0 Z0.6 ; set Z probe trigger value, offset and trigger height
M557 X20:215 Y20:215 S20 ; define mesh grid; Heaters
M305 P0 T98801 B4185 R4700 ; set thermistor + ADC parameters for heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M305 P1 T98801 B4185 R4700 ; set thermistor + ADC parameters for heater 1
M143 H1 S280 ; set temperature limit for heater 1 to 280C; Fans
M106 P0 S0 I0 F500 H-1 ; set fan 0 value, PWM signal inversion and frequency. Thermostatic control is turned off
M106 P1 S1 I0 F500 H1 T45 ; set fan 1 value, PWM signal inversion and frequency. Thermostatic control is turned on
M106 P2 S1 I0 F500 H0:1 T45 ; set fan 2 value, PWM signal inversion and frequency. Thermostatic control is turned on; Tools
M563 P0 D0 H1 F0 ; define tool 0
;G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
;G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C; Custom settings are not defined
; Miscellaneous
M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss -
ok we'll have to convert more of your config.g over to use RRF3 syntax.
If you send M98 P"config.g" what errors do you get?
-
@Phaedrux said in unusual/unnerving noises + error codes:
M98 P"config.g"
M98 P"config.g"
HTTP is enabled on port 80
FTP is disabled
TELNET is disabled
Error: in file macro line 44: M307: parameter 'H' too high
Error: Missing Z probe pin name(s)
Error: Invalid Z probe index
Error: M305 has been replaced by M308 and M950 in RepRapFirmware 3
Error: Heater 0 does not exist
Error: M305 has been replaced by M308 and M950 in RepRapFirmware 3
Error: Heater 1 does not exist
Error: Fan number 0 not found
Error: Fan number 1 not found
Error: Fan number 2 not found -
The fans aren’t connected so that will be why they can’t be found
-
I've made a config for you to try using the web configurator tool.
First make a backup of your /sys folder in DWC by putting check boxes next to all the files and then right clicking and selecting download as zip. Then save it to you computer. That will be a backup of your current config files.
Here download this and change the extension from .txt to .zip. And then upload the whole zip file as is (don't extract it) to the /sys folder in DWC.
Reboot and it should be a bit closer to working I think.
-
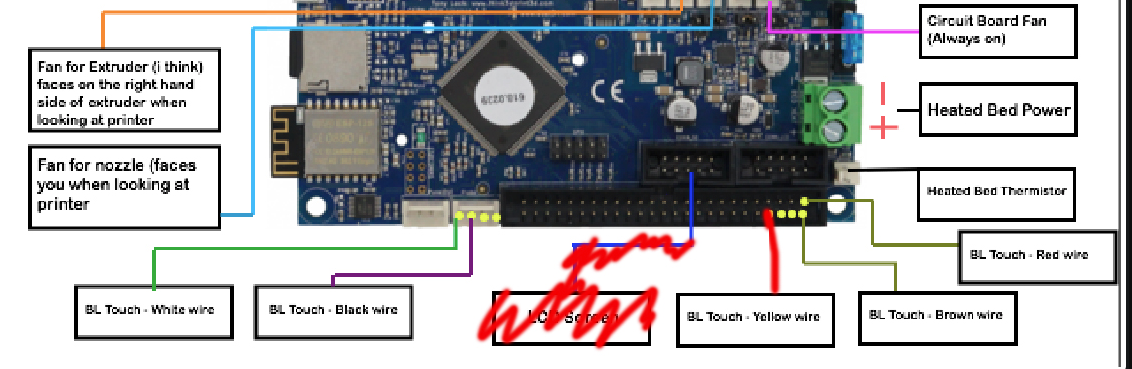
; Configuration file for Duet WiFi (firmware version 3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.1.4 on Wed Sep 16 2020 13:12:28 GMT-0600 (Central Standard Time) ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"Duet2Wifi" ; set printer name ; Network M552 S1 ; enable network M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0 S0 ; physical drive 0 goes backwards M569 P1 S0 ; physical drive 1 goes backwards M569 P2 S1 ; physical drive 2 goes forwards M569 P3 S1 ; physical drive 3 goes forwards M584 X0 Y1 Z2 E3 ; set drive mapping M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X80.00 Y80.00 Z400.00 E93.00 ; set steps per mm M566 X900.00 Y900.00 Z12.00 E1200.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z20.00 E250.00 ; set accelerations (mm/s^2) M906 X600 Y600 Z600 E600 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X-5.5 Y-10 Z0 S1 ; set axis minima M208 X220 Y220 Z250 S0 ; set axis maxima ; Endstops M574 X1 S1 P"xstop" ; configure active-high endstop for low end on X via pin xstop M574 Y1 S1 P"ystop" ; configure active-high endstop for low end on Y via pin ystop M574 Z1 S2 ; configure Z-probe endstop for low end on Z ; Z-Probe M950 S0 C"exp.heater3" ; create servo pin 0 for BLTouch M558 P9 C"^zprobe.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds G31 P500 X-31 Y0 Z0.6 ; set Z probe trigger value, offset and trigger height M557 X9.5:215 Y5:195 S20 ; define mesh grid ; Heaters M308 S0 P"bedtemp" Y"thermistor" T98801 B4185 ; configure sensor 0 as thermistor on pin bedtemp M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0 M307 H0 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S120 ; set temperature limit for heater 0 to 120C M308 S1 P"e0temp" Y"thermistor" T98801 B4185 ; configure sensor 1 as thermistor on pin e0temp M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1 M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit ; Fans M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency M106 P0 C"Heatsink" S0 H-1 ; set fan 0 name and value. Thermostatic control is turned off M950 F1 C"fan1" Q500 ; create fan 1 on pin fan1 and set its frequency M106 P1 C"PartCooling" S1 H1 T45 ; set fan 1 name and value. Thermostatic control is turned on ; Tools M563 P0 S"PrintHead01" D0 H1 F0 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C ; Custom settings are not defined ; Miscellaneous M575 P1 S1 B57600 ; enable support for PanelDue M501 ; load saved parameters from non-volatile memory M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss T0 ; select first toolI took the values from your current config.g. It assumes that your BLTouch is connected to heater pin 3 on the expansion header.
-
Error: in file macro line 9: G30: Z probe 0 not found
Error: Homing failedSo im still getting this error :s
-
When do you get that error?
You are using the config file set I posted?
How is your BLtouch wired?
If you send M558 in the console what does it reply with?
-
@PR1OR said in unusual/unnerving noises + error codes:
M98 P"config.g"
this is looking alot better though!!
M98 P"config.g"
HTTP is enabled on port 80
FTP is disabled
TELNET is disabled
Warning: Macro file config-override.g not found -
So when i click home all, it homes X and Y fine then the Z starts going down then stops and put that error up.
Yeah this was using your Config file you just sent
wired like in this diagram
And this is what i get in return of M558
m558
Z Probe 0: type 9, input pin zprobe.in, output pin nil, dive height 5.0mm, probe speed 120mm/min, travel speed 6000mm/min, recovery time 0.00 sec, heaters normal, max taps 1, max diff 0.03Let me know if i can give you anymore info, im very confused now haha
-
Can you go through this testing procedure for the probe and tell me how far you get?
https://duet3d.dozuki.com/Wiki/Test_and_calibrate_the_Z_probe#Section_Static_test_of_the_Z_probe
We're getting closer.
-
So i got to step 4
'With the Z probe deployed (if applicable) but not close enough to the bed to trigger it, check that the Z probe reading in Duet Web Control is zero or close to zero.'
its not showing the right distance i dont think
-
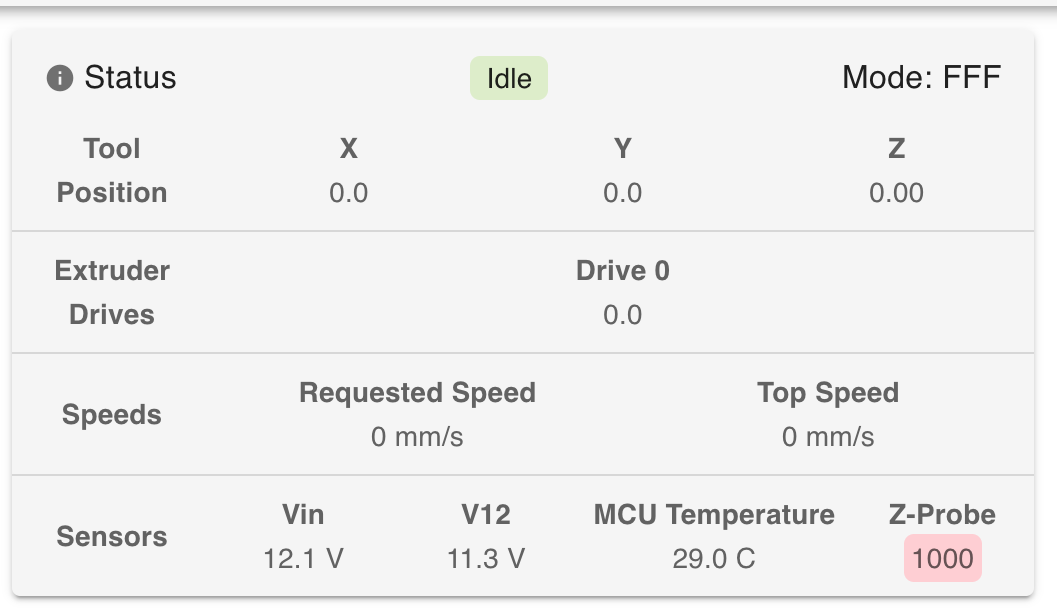
That's not the Z probe reading it's talking about.
It should either show 0 or 1000. In the case of the BLtouch it should show 0 most of the time and when it triggers it would very briefly flash 1000.
-
Where would i see that?
-
The bottom right corner of that same display box under the heading Z-Probe
-
@Phaedrux so im not sure what just happened but it seems to be working now however when homing the x axis it shakes for a couple seconds and then is fine. the y axis homes but stays to far away so i had to manually flick the bl touch probe. But it worked. Is this just playing around with the axis limits?
-
Well you should still verify the basics.
I suggest you take a look through these guides.
https://duet3d.dozuki.com/Guide/Ender+3+Pro+and+Duet+Maestro+Guide+Part+3:+Commissioning/39
https://duet3d.dozuki.com/Guide/Ender+3+Pro+and+Duet+Maestro+Guide+Part+4:+Calibration/40
-
Thank you for this!!! i now have everything homing correctly and no weird noises or shaking which is great.
Apologies for this, i am trying to find pages that help and i really appeciate all the help you have given me to far. But...
I have been following this
https://duet3d.dozuki.com/Guide/Ender+3+Pro+and+Duet+Maestro+Guide+Part+3:+Commissioning/39
Ive got to step 8 and as soon as i get to roughly 30 degree it stops and shows this message
Error: Heater 0 fault: temperature rising much more slowly than the expected 1.7°C/sec
i did some googling and found this
it says i need to do this 'Therefore, you must perform a PID auto tuning to give the firmware a model for bed heater performance. Failure to do so will result in an error message that the heater temperature is not rising fast enough'
But i dont know what a PID is or how to run it. Are you able to help with this?
-
Pid tuning is part of the calibration guide.