Настройка SCARA
-
Hello, David! I finally did launch my SCARA. DWC shows all the coordinates in mm correctly, but the movement occurs only in degrees, the G90 also works in degrees. Help me how to transfer commands to the Cartesian coordinate system. I'll be very grateful to you, or I'll soon have "smoke from my ears." Respectfully, Valery.
Duet 0.6 (duet06)
RepRapFirmware for Duet 1.26.1 (2020-02-09b1) -
-
Is it working?
-
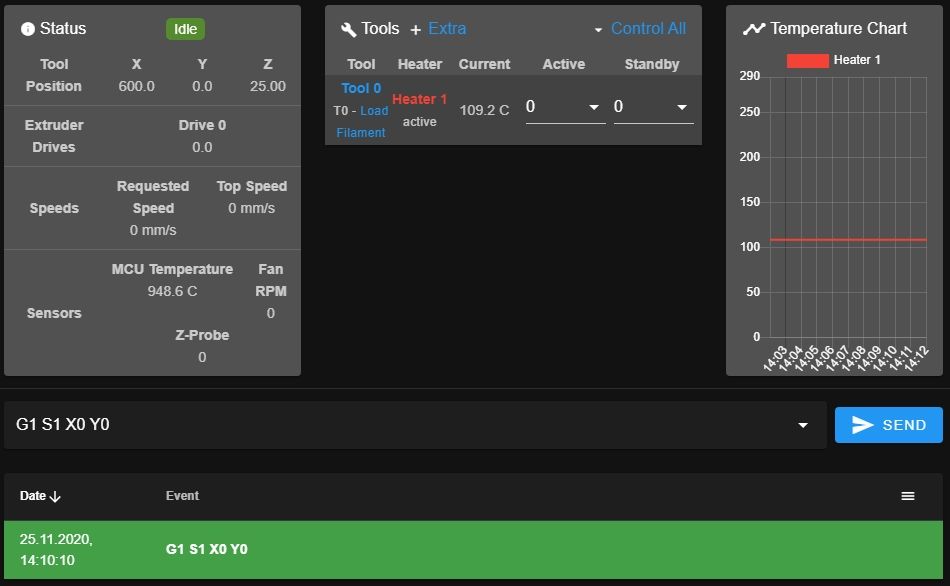
DWC shows all the coordinates in mm correctly, but the movement occurs only in degrees, the G90 also works in degrees.
-
-
The Concies are triggered by the X=0 Y=0
G1 S1 X0 Y0 > X=600(MAX) -
Maybe it makes sense to try the firmware version 1.19 on which you set up your SCARA...
-
David, I'm sorry for perseverance, but there's no one else to turn.
That's what it should be.
Result.What am I doing wrong?
-
@v_gerzha hello!
Your M350 X128 Y128 I0
should be changed to
M350 X16 Y16 I1
because with the I0 setting you will get lost steps probably.
You have to change M92 then also.
Before you change, make some movements, then M122, then look for hiccups. High numbers of hiccups mean lost steps because there are more steps (the signals from Duet controller to the stepper driver) to create than the hardware can do.You should also check the correctness of the following values in config:
- arm length
- angle
- gear ratio
Is e.g. 1:5 correct in the calculation, or is it a gear of 1:5.18 gearbox which is common for steppers? My stepper gearbox is 1: (5+2/11).
-
I'm completely confused in the corners. You can draw in what position the X (min/max) and Y (min/max) sensors should be triggered and how the X and Y coordinates are located in your configuration after homeall.g
-
@v_gerzha I cannot tell you, I have no scara. In general X0Y0 is front left.
The coordinate system is explained in https://duet3d.dozuki.com/Wiki/ConfiguringRepRapFirmwareSCARAPrinter in section Scara description and in section calibration.The three possible errors are from my experience with other rotating arms, in this case the parallel scara, where I had a similar result with wrong settings. You could change the 3 parameters and check whether the result gets better, but I would change only 1 parameter with every test, otherwise you don't know which one was the reason.
arm length: from hinge middle to hinge middle
angle: exact angle when the endstop triggers
gear ratio: recheck the datasheet if it's a stepper with gearbox
fourth: when Z actuator is fixed, the proximal and distal movements must stay horizontal while they rotate
also check: Xxxx and Yyyy X and Y offsets from the location of the proximal joint. (parameters, see documentation of link above)