Duet 3 mini 5+ need help with wiring and config
-
I am trying to set up my card but i have no clue on how to wire in my bl touch. Also i have no clue how to set it up in the configurator. Do i need to setup "input Pin", "Modulation pin" and "PWM Control Channel (bl touch only)"?
Also having issues figuring out how to setup 2 z motors using the config. I cannot assign a Endstop pin to E0 which is my 2nd z motor.
When it comes to the fans do i need to connect the ground?
I am adding my config if anyone wants to take a look. -
https://duet3d.dozuki.com/Guide/Ender+3+Pro+and+Duet+3+Mini+5++Guide+Part+1:+Wiring/87?lang=en
Here's a wiring guide that includes a section on BLtouch.
The config portion is coming soon, but here's the relevant portion of config for the BLTouch.
M950 S0 C"io3.out" ; create servo pin 0 for BLTouch
M558 P9 C"^io3.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speedsYou cannot setup dual z motors in the config tool, you mave to do it manually by editing the config,g and modifying the M584 command to map both drivers to your Z axis.
https://duet3d.dozuki.com/Wiki/Gcode#Section_M584_Set_drive_mapping
To add a second endstop for the zaxis you'll also have to modify the M574 command in config.g to include both endstop pins.
There's an example here: https://duet3d.dozuki.com/Wiki/Bed_levelling_using_multiple_independent_Z_motors#Section_In_RepRapFirmware_Num_3
I'm not sure I understand you fan question, but hopefully the wiring guide will clear up the fan wiring. But if it's a 2 wire fan you have + and - no ground.
Example config for an Ender3
; Configuration file for Duet 3 Mini 5+ (firmware version 3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.2.0 on Wed Jan 06 2021 00:34:52 GMT-0600 (Central Standard Time) ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"E3D3M5+" ; set printer name M918 P1 E4 F2000000 ; configure direct-connect display ; Network M552 P0.0.0.0 S1 ; enable network and acquire dynamic address via DHCP M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0.0 S0 ; physical drive 0.0 goes backwards M569 P0.1 S0 ; physical drive 0.1 goes backwards M569 P0.2 S1 ; physical drive 0.2 goes forwards M569 P0.3 S0 ; physical drive 0.3 goes backwards M584 X0.0 Y0.1 Z0.2 E0.3 ; set drive mapping M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X80.00 Y80.00 Z1600.00 E93.00 ; set steps per mm M566 X900.00 Y900.00 Z60.00 E300.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z600.00 E3600.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z200.00 E2500.00 ; set accelerations (mm/s^2) M906 X600 Y600 Z600 E900 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X235 Y235 Z260 S0 ; set axis maxima ; Endstops M574 X1 S1 P"io5.in" ; configure active-high endstop for low end on X via pin io5.in M574 Y1 S1 P"io6.in" ; configure active-high endstop for low end on Y via pin io6.in M574 Z1 S2 ; configure Z-probe endstop for low end on Z ; Z-Probe M950 S0 C"io3.out" ; create servo pin 0 for BLTouch M558 P9 C"^io3.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds G31 P500 X-44 Y-17 Z2 ; set Z probe trigger value, offset and trigger height M557 X5:190 Y5:215 S10 ; define mesh grid ; Heaters M308 S0 P"temp0" Y"thermistor" T98801 B4185 ; configure sensor 0 as thermistor on pin temp0 M950 H0 C"out0" T0 ; create bed heater output on out0 and map it to sensor 0 M307 H0 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S120 ; set temperature limit for heater 0 to 120C M308 S1 P"temp1" Y"thermistor" T98801 B4185 ; configure sensor 1 as thermistor on pin temp1 M950 H1 C"out1" T1 ; create nozzle heater output on out1 and map it to sensor 1 M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit M143 H1 S240 ; set temperature limit for heater 1 to 240C ; Fans M950 F0 C"out3" Q500 ; create fan 0 on pin out3 and set its frequency M106 P0 C"PartCool" S0 H-1 ; set fan 0 name and value. Thermostatic control is turned off M950 F1 C"out4" Q500 ; create fan 1 on pin out4 and set its frequency M106 P1 C"HotEnd" S1 H1:0 T45 ; set fan 1 name and value. Thermostatic control is turned on M950 F2 C"out5" Q500 ; create fan 2 on pin out5 and set its frequency M106 P2 C"CaseFan" S1 H1:0 T45 ; set fan 2 name and value. Thermostatic control is turned on M950 F3 C"out6" Q500 ; create fan 3 on pin out6 and set its frequency M106 P3 C"LEDs" S1 H-1 ; set fan 3 name and value. Thermostatic control is turned off ; Tools M563 P0 S"HotEnd" D0 H1 F0 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C ; Custom settings M574 Z2 S1 P"io2.in" ; configure active-high endstop for high end on Z M204 P600 T2000 ; Set accelerations (mm/s^2) for print and travel moves M912 P0 S-13 ; CPU temperature calibration M572 D0 S0.35 ; Pressure Advance M207 S6.5 R0.0 F4800 T4800 Z0.0 ; Retraction M280 P0 S160 ; Clear any alarms M402 ; retract pin just in case ; Miscellaneous M575 P1 S1 B57600 ; enable support for PanelDue M501 ; load saved parameters from non-volatile memory M911 S22 R23 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss T0 ; select first tool -
Is till don't get it. He is using just 1 connector but say that i need to connect to io3 and io1.
-
Sorry for the confusion. The io1 has been corrected to io3.
It should be io3.in and io3.out
In takes the trigger signal and out controls the servo pin.
-
-
Can you show a screenshot of what you mean?
-
@Phaedrux nwm i figured it out. You set to sue bltouch further ahead in the config.
-
 Screen Shot 2021-01-05 at 11.40.08 PM.png
Screen Shot 2021-01-05 at 11.40.08 PM.png Screen Shot 2021-01-06 at 12.02.24 AM.png
Screen Shot 2021-01-06 at 12.02.24 AM.png -
@Phaedrux i got everything wired up and the pin extend and retract but it does not light blue and it does not report a value. What could be wrong?
-
you will not see the bltouch value change, it triggers for a fraction of a second.
test it with g30 and triggering it by hand so you can power off if it does not stop.
-
@Veti i tried and the value on the webui will just show 0. I have tried while homing to and it will not report a value, so bed will continue even if the pin is triggered by me. Pretty sure it should light blue when active also.
I used these steps tio manually test also
"To test the setup with the nozzle maybe a 100mm up from the bed you can check if the trigger signal is reaching the Duet by attempting to extend the pin by using the following command:
M280 P0 S10
If all is well the web interface should report a value of ”0” or "N/A" in the Z probe column when the pin is extended. You can then lightly touch the extended probe pin to check that the value in the Z probe Column changes to “1000”
You can retract the pin again with
M280 P0 S90"
-
How exactly do you have it wired? And what does the M558 M950 commands look like in your config.g? Does it match what I showed above?
Are you wired to IO3 like this?
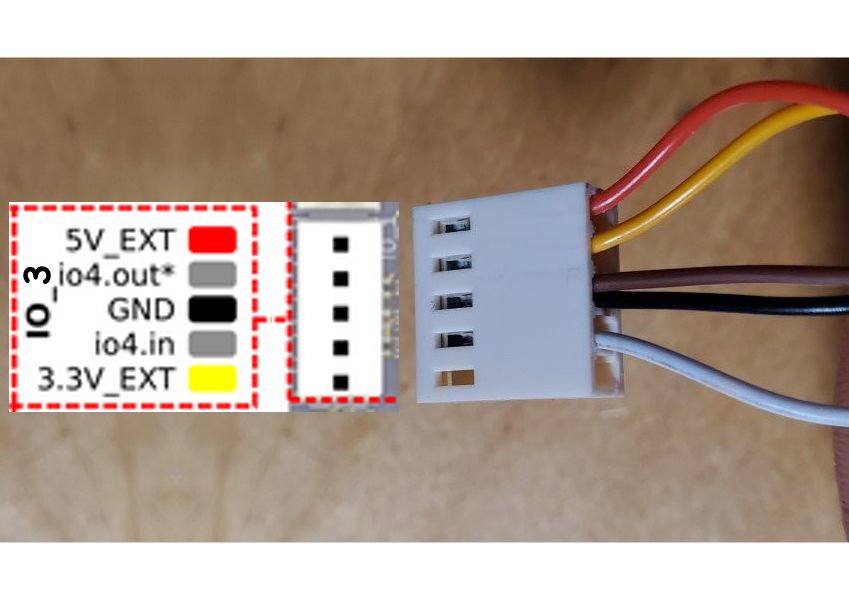
-
@Phaedrux it is just like in the picture, i made sure i have connection all the way to the probe using a multimeter so no broken wire.
i have not amde any changes to M950 or M558, It is just as the config did them.
M950 S0 C"io3.out" ; create servo pin 0 for BLTouch M558 P9 C"^io3.in" H350 F350 T4800 B1 ; set Z probe type to bltouch and the dive height + speeds + heater off while probing -
@Alucardi said in Duet 3 mini 5+ need help with wiring and config:
H350
Change that to H5. 350mm dive height is possibly problematic. But maybe not your problem here.
So just to recap. You're wired up to io_3 just like in the photo. Your config looks ok for io_3. And your deploy and retract macros look correct.
When you power on does the BLTouch do a self test?
Does sending M401 and M402 deploy and retract the pin?
Does sending G30 deploy the pin?
Does touching the pin after doing the G30 stop movement? -
When you power on does the BLTouch do a self test? Yes
Does sending M401 and M402 deploy and retract the pin? Yes
Does sending G30 deploy the pin? Yes it deploys during homing.
Does touching the pin after doing the G30 stop movement? It reacts to me pushing it but wont stop bed going up. -
Then I suspect a bad connection on the white wire to io_3.in. That's the trigger signal wire. Retest continuity. Recrimp it. Make sure it's in the shell properly. Make sure it's on the right pin.
As an additional check, please send M98 P"config.g" and report any errors. Also send M558 P9 and see if it reports back what you'd expect.
Also post your homeall.g
-
@Phaedrux said in Duet 3 mini 5+ need help with wiring and config:
M558 P9
Gives me error
M558 P9
Error: M558: Missing Z probe pin name(s) -
Homeall will be cleaned up and call for separate axels instead but i did it like this when i was trying to config sensorless homeing.
M400 ; finishes all current moves and and thus clears the buffer M913 X50 Y50 ; drop motor current to 33% M569 P0.0 D3 V60 ; reduce V to ensure stealthChop is enabled M569 P0.1 D3 V60 ; reduce V to ensure stealthChop is enabled M915 P0.0 S1 R0 F0 H400 ; sensitivity X, don’t take action, don’t filter M915 P0.1 S1 R0 F0 H400 ; sensitivity Y, don’t take action, don’t filter M400 ; finishes all current moves and and thus clears the buffer G91 ; relative positioning G1 H1 Z10 F5000 ; lift Z relative to current position G1 H1 X5 G4 P300 G1 H1 X20 F3000 G1 H1 X-400 F3000 ; move to X G1 H1 Y-5 G4 P200 G1 H1 Y-20 F3000 G1 H1 Y400 F3000 ; move to Y M913 X100 Y100 ; return current to 100% G90 ; absolute positioning G1 X167.5 Y167.5 F5000 G30 ; home Z by probing the bed M402 ; retract probe G1 Z5 F5000 M400 ; finishes all current moves and and thus clears the buffer M569 P0.0 D2 ; restore default for motor M569 P0.1 D2 ; restore default for motor M913 X100 Y100 ; return current to 100% M400 ; finishes all current moves and and thus clears the buffer -
Ok how bout just M558
-
@Phaedrux M558
Error: M558: Z probe 0 not found