Delta z axis position is wrong 3.2.2
-
I've been knocking myself today as I can't seem to figure this one out.
I installed a duet3d 2 1.04 board into my Flsun QQ-S delta printer and configured it from a kossel config file and started fine tuning the setup. I got the x+y motors to home until they hit the end-stops, but the z axis doesnt move at all.
I noticed that the machine status says x=0, y=0, z=220. I guess Z should be 0 too as this is a delta printer.The only place I could find a 220 reference when starting the printer is the M665 R104.3 L215 B104 H220 command. The last parameter is 220. and the Z axis gets set to this value when firmware starts up.
I did try to set a G92 at the end of the file but that didnt help -->"G92 X0 Y0 Z0"
For some reason the interface is also weird, it seems like it stops loading. It could mabye have to do with the M665 command and the weird Z position when firmware loads up ?
Heres the config.g file:
G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"qq-spro" ; set printer name M665 R104.3 L215 B104 H220 ; Set delta radius, diagonal rod length, printable radius and homed height M666 X0 Y0 Z0 ; put your endstop adjustments here, or let auto calibration find them ; Network M551 P"pi" ; set password M552 S1 ; enable network M586 P0 S1 ; enable HTTP M586 P1 S1 ; enable FTP M586 P2 S1 ; enable Telnet ; Drives M569 P0 S0 ; physical drive 0 goes backwards M569 P1 S0 ; physical drive 1 goes backwards M569 P2 S0 ; physical drive 2 goes backwards M569 P3 S1 ; physical drive 3 goes forwards M584 X0 Y1 Z2 E3 ; set drive mapping M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X79.30 Y79.30 Z79.30 E95.70 ; set steps per mm M566 X1200.00 Y1200.00 Z1200.00 E6000.00 ; set maximum instantaneous speed changes (mm/min) M203 X18000.00 Y18000.00 Z18000.00 E6000.00 ; set maximum speeds (mm/min) M201 X2000.00 Y2000.00 Z2000.00 E2000.00 ; set accelerations (mm/s^2) M906 X1200 Y1200 Z1200 E1200 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 Z0 S1 ; set minimum Z ; Endstops M574 X2 S1 P"xstop" ; configure active-high endstop for high end on X via pin xstop M574 Y2 S1 P"ystop" ; configure active-high endstop for high end on Y via pin ystop M574 Z2 S1 P"zstop" ; configure active-high endstop for high end on Z via pin zstop ; Z-Probe M558 P5 C"^zprobe.in" H5 F600 T9000 ; set Z probe type to switch and the dive height + speeds G31 P25 X-2 Y-2 Z20 ; set Z probe trigger value, offset and trigger height M557 R100 S40 ; define mesh grid ; Heaters M308 S0 P"bedtemp" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin bedtemp M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0 M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S120 ; set temperature limit for heater 0 to 120C M308 S1 P"e0temp" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin e0temp M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1 M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit M143 H1 S280 ; set temperature limit for heater 1 to 280C ; Fans M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off M950 F1 C"fan1" Q500 ; create fan 1 on pin fan1 and set its frequency M106 P1 S1 H1 T38 ; set fan 1 value. Thermostatic control is turned on M950 F2 C"fan1" Q500 ; create fan 2 on pin fan1 and set its frequency M106 P2 S1 H1:0 T38 ; set fan 2 value. Thermostatic control is turned on ; Tools M563 P0 D0 H1 F0 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C ; Custom settings ; M591 D0 C3 P2 E6.0 ;This is the command for filament monitoring using an optical on/off switch M579 X1.012 Y0.9871 ; Miscellaneous M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss M564 H0 ;allow to axis to be moved before homing -
I did swap Z and X wiring including endstops to see if the Z motor were actually moving.. and it did move just like x and y motors.. just that when X motor came into the Z slot on the board the X motor didnt move either.
-
Can you post the results of M122 and M98 P"config.g"?
What URL are you using to reach DWC? Have you tried a hard refresh of the page? Clear browser cache?
-
@manpowre said in Delta z axis position is wrong 3.2.2:
For some reason the interface is also weird, it seems like it stops loading. It could mabye have to do with the M665 command and the weird Z position when firmware loads up ?
does your ui version match your firmware? i think you are running an old ui version
-
I was initially thinking it might be the browser, as I use firefox, but then changed to chrome and Edge and the same thing happened.I use http://192.168.2.237 to access the web interface.
I had to run these 2 commands through YAT as the web interface disconnects constantly too.. The wifi firmware is updated to 1.25 as it didnt update with the 3.2.2 package. so I did that separately.
thanks for taking a look at this with me
")
M122 === Diagnostics === RepRapFirmware for Duet 2 WiFi/Ethernet version 3.2.2 running on Duet WiFi 1.02 or later Board ID: 08DGM-917NK-F2MS4-7JTD0-3SN6T-KGU0H Used output buffers: 1 of 24 (12 max) === RTOS === Static ram: 23460 Dynamic ram: 72480 of which 56 recycled Never used RAM 16084, free system stack 187 words Tasks: NETWORK(ready,413) HEAT(blocked,314) MAIN(running,404) IDLE(ready,20) Owned mutexes: USB(MAIN) === Platform === Last reset 00:00:22 ago, cause: power up Last software reset time unknown, reason: User, GCodes spinning, available RAM 16084, slot 2 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0041f000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a Error status: 0x00 Aux0 errors 0,0,0 MCU temperature: min 37.2, current 37.4, max 37.6 Supply voltage: min 1.3, current 1.3, max 1.4, under voltage events: 0, over voltage events: 0, power good: no Driver 0: position 32355, ok, SG min/max not available Driver 1: position 32355, ok, SG min/max not available Driver 2: position 32355, ok, SG min/max not available Driver 3: position 0, ok, SG min/max not available Driver 4: position 0, ok, SG min/max not available Driver 5: position 0 Driver 6: position 0 Driver 7: position 0 Driver 8: position 0 Driver 9: position 0 Driver 10: position 0 Driver 11: position 0 Date/time: 1970-01-01 00:00:00 Cache data hit count 29264375 Slowest loop: 4.54ms; fastest: 0.13ms I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0 === Storage === Free file entries: 10 SD card 0 detected, interface speed: 20.0MBytes/sec SD card longest read time 0.2ms, write time 0.0ms, max retries 0 === Move === DMs created 83, maxWait 0ms, bed compensation in use: none, comp offset 0.000 === MainDDARing === Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === AuxDDARing === Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters = 0 -1 -1 -1, chamberHeaters = -1 -1 -1 -1 === GCodes === Segments left: 0 Movement lock held by null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is ready with "M122" in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 Daemon is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty. === Network === Slowest loop: 201.80ms; fastest: 0.10ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions HTTP sessions: 0 of 8 - WiFi - Network state is active WiFi module is connected to access point Failed messages: pending 0, notready 0, noresp 1 WiFi firmware version 1.25 WiFi MAC address 8c:aa:b5:d5:70:a5 WiFi Vcc 3.35, reset reason Turned on by main processor WiFi flash size 4194304, free heap 24304 WiFi IP address 192.168.2.237 WiFi signal strength -42dBm, mode 802.11n, reconnections 0, sleep mode modem Clock register 00002002 Socket states: 0 0 0 0 0 0 0 0 okM98 P"config.g" HTTP is enabled on port 80 FTP is enabled on port 21 TELNET is enabled on port 23 Error: Pin 'fan1' is not free Error: Fan number 2 not found ok -
I decided to update to latest firmware to see. still getting the buttons on the web interface to collapse. The wifi part is compatible with 1.25 so that didnt get updated.
M115 FIRMWARE_NAME: RepRapFirmware for Duet 2 WiFi/Ethernet FIRMWARE_VERSION: 3.3beta2 ELECTRONICS: Duet WiFi 1.02 or later FIRMWARE_DATE: 2021-03-10 13:24:09M122 === Diagnostics === RepRapFirmware for Duet 2 WiFi/Ethernet version 3.3beta2 running on Duet WiFi 1.02 or later Board ID: 08DGM-917NK-F2MS4-7JTD0-3SN6T-KGU0H Used output buffers: 1 of 24 (13 max) === RTOS === Static ram: 21568 Dynamic ram: 74340 of which 0 recycled Never used RAM 18508, free system stack 186 words Tasks: NETWORK(notifyWait,218) HEAT(delaying,310) MAIN(running,405) IDLE(ready,20) Owned mutexes: WiFi(NETWORK) USB(MAIN) === Platform === Last reset 00:03:54 ago, cause: software Last software reset time unknown, reason: User, GCodes spinning, available RAM 16084, slot 2 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0041f000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a Error status: 0x00 Aux0 errors 0,0,0 MCU temperature: min 40.0, current 40.5, max 40.9 Supply voltage: min 1.3, current 1.4, max 1.4, under voltage events: 0, over voltage events: 0, power good: no Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0 Driver 0: position 32355, ok, SG min/max not available Driver 1: position 32355, ok, SG min/max not available Driver 2: position 32355, ok, SG min/max not available Driver 3: position 0, ok, SG min/max not available Driver 4: position 0, ok, SG min/max not available Driver 5: position 0 Driver 6: position 0 Driver 7: position 0 Driver 8: position 0 Driver 9: position 0 Driver 10: position 0 Driver 11: position 0 Date/time: 1970-01-01 00:00:00 Cache data hit count 268341907 Slowest loop: 5.33ms; fastest: 0.14ms I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0 === Storage === Free file entries: 10 SD card 0 detected, interface speed: 20.0MBytes/sec SD card longest read time 0.2ms, write time 0.0ms, max retries 0 === Move === DMs created 83, maxWait 0ms, bed compensation in use: none, comp offset 0.000 === MainDDARing === Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === AuxDDARing === Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters = 0 -1 -1 -1, chamberHeaters = -1 -1 -1 -1 === GCodes === Segments left: 0 Movement lock held by null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is ready with "M122" in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 Daemon is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty. === Network === Slowest loop: 199.89ms; fastest: 0.09ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions HTTP sessions: 0 of 8 - WiFi - Network state is active WiFi module is connected to access point Failed messages: pending 0, notready 0, noresp 1 WiFi firmware version 1.25 WiFi MAC address 8c:aa:b5:d5:70:a5 WiFi Vcc 3.35, reset reason Turned on by main processor WiFi flash size 4194304, free heap 24304 WiFi IP address 192.168.2.237 WiFi signal strength -44dBm, mode 802.11n, reconnections 0, sleep mode modem Clock register 00002002 Socket states: 0 0 0 0 0 0 0 0 okM98 P"config.g" HTTP is enabled on port 80 FTP is enabled on port 21 TELNET is enabled on port 23 Error: Pin 'fan1' is not free Error: Fan number 2 not found ok -
And i updated the web interface as the instructions here
https://duet3d.dozuki.com/Wiki/Installing_and_Updating_Firmware#Section_Updating_DuetWebControl_filesand new web interface.. and the collapse is gone and I see the updated one.
now back to my original problem.
the Z axis reports 220 in status area for Machine position while x and y is 0.
-
@manpowre the Z in the status window is the height not the Z tower.
That implies the nozzle is at the centre of the bed, 220mm away from the build surface -
@manpowre As @jay_s_uk says, the web interface reports the nozzle position in X, Y and Z cartesian coordinates, not the position of each tower, on a Delta. So this is normal and correct.
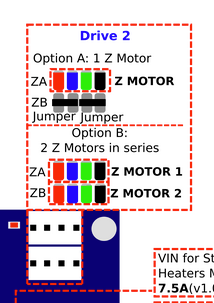
If the Z axis isn't moving at all, check that you have the jumpers on the second Z motor pin header. See the wiring diagram here: https://duet3d.dozuki.com/Wiki/Duet_Wiring_Diagrams
Otherwise, as you've already tested the Z motor on another axis and it works, and tested another working motor on the Z axis and it doesn't work, it's possible that the motor driver has failed. Check both sides of the board around the to see if there's any obvious damage, or if the pins of the motor connectors are not soldered (occasionally happens). Post a picture if you're not sure.
Finally, the Z axis is close to the mounting hole; check that it's not shorting on the back of the board across to any mounting screws.
If it does look like the stepper driver has failed, please let me know when and where you bought it from.
Finally (again) you could move the Z axis onto the spare driver 4 (labelled E1). In config.g, add
M569 P4 S1and change M584 toM584 X0 Y1 Z4 E3. This should get you going. Though if it's a warranty, you'll be better off exchanging the board.Let me know how you get on.
Ian
-
@droftarts thank you very much for excellent explanation. it was the missing 2x jumper. I came home from work and connected the 2 jumpers and all 3 motors home successfully. Yesterday I had several issues updating the software was one including web interface, wifi firmware and not to mention the upgrade process from 2.x reprap to 3.x reprap that has to go through 3.0 to get to 3.2. During work today I was thinking mabye I could try to use the last stepper driver instead. didnt know if that would work, as you confirmed my thoughts are in the same direction if the z driver wouldnt work.
thanks.. the response I got here sorted me out.. now off to configuring this to work with correct dimensions.