Five bar Parallel SCARA print area problem
-
Hello there
@Joergs5 and @bondus thank you very much.
I've been working on Five Bar SCARA since last week. I couldn't determine the print area. I get the following error after the G28 X command. "ERROR: G0 / G1: TARGET Position Not Reachable from Current Position" .Firmware recompiling the variables by "Debugprintf". I'm putting my mistake and setting files in the below. If you are helpful I will appreciate it.

VIDEO : Five Bar Parallel Scara Home
config.g file
; General preferences G90 ; Send absolute coordinates... M83 ; ...but relative extruder moves M552 S1 ; Turn network on M586 P0 S1 ; Enable HTTP M586 P1 S0 ; Enable FTP M586 P2 S0 ; Enable Telnet ; Drives M569 P0 S1 ; Drive 0 (X) goes forwards M569 P1 S1 ; Drive 1 (Y) goes forwards ;M569 P2 S1 ; Drive 2 (Z) goes forwards ;M569 P3 S1 ; Drive 3 (E0) goes forwards M584 X0 Y1 ; set drive mapping M350 X128 Y128 I1 ;S3 ; Configure microstepping with interpolation M669 K9 L2 X-95:95 Y0:0 P130:130 D186:186:0:0 B30:270 A15:165:0:360:0:360 C270:0:0:270 M92 X1444.444444 Y1444.444444 Z400 E95.2 ; Set steps per mm M203 X10000 Y10000 ; maximum speeds mm/minute M566 X15 Y15 ; Set maximum instantaneous speed changes (mm/min) M201 X40 Y40 ; Set accelerations (mm/s^2) M906 X1200 Y1200 ; Set motor currents (mA) and motor idle factor in per cent M84 S0 ; Set idle timeout ; Axis Limits M208 X1000:-1000 Y1000:-1000 ; set axis minima and maxima ; Endstops M574 X1 S1 P"xstop" ; X min active high endstop switch M574 Y2 S1 P"ystop" ; Y min active high endstop switch ;M574 Z0 S1 P"zstop" ; Z min active high endstop switchhome5barscara.g file
G91 ; relative positioning G1 H1 X100 Y300 F900 ; move quickly to endstop and stop there (first pass) G1 H1 X300 F900 G1 H1 Y300 F900 G1 H2 X-2 Y-2 F900 ; go back a few degrees G1 H1 X100 F90 ; move slowly to endstop once more (second pass) G1 H1 Y100 F90 ; move slowly to endstop once more (second pass) G92 Z0 G90 ; absolute positioning G0 X0 Y0 F6000 ; move to a reasonable positionDebug outputs:
m115 FIRMWARE_NAME: RepRapFirmware for STM32F4 based Boards FIRMWARE_VERSION: 3.2.2_2 ELECTRONICS: STM32F4 FIRMWARE_DATE: 2021-05-02 ok g28 x getForwad->getIntersec(distalL:186.00,distalR:186.00,xL:-142.06,yL:121.18,xR:95.00,yR:-130.00) getIntersec firstRadius: 186.00 secondRadius: 186.00 firstX: -142.06 firstY: 121.18 secondX: 95.00 secondY: -130.00 getForwad->getIntersec(distalL:186.00,distalR:186.00,xL:-142.06,yL:121.18,xR:95.00,yR:-130.00) getIntersec firstRadius: 186.00 secondRadius: 186.00 firstX: -142.06 firstY: 121.18 secondX: 95.00 secondY: -130.00 getForwad->getIntersec(distalL:186.00,distalR:186.00,xL:17.58,yL:65.00,xR:95.00,yR:-130.00) getIntersec firstRadius: 186.00 secondRadius: 186.00 firstX: 17.58 firstY: 65.00 secondX: 95.00 secondY: -130.00 getForwad->getIntersec(distalL:186.00,distalR:186.00,xL:17.58,yL:65.00,xR:95.00,yR:-130.00) getIntersec firstRadius: 186.00 secondRadius: 186.00 firstX: 17.58 firstY: 65.00 secondX: 95.00 secondY: -130.00 getForwad->getIntersec(distalL:186.00,distalR:186.00,xL:17.58,yL:65.00,xR:95.00,yR:-130.00) getIntersec firstRadius: 186.00 secondRadius: 186.00 firstX: 17.58 firstY: 65.00 secondX: 95.00 secondY: -130.00 getForwad->getIntersec(distalL:186.00,distalR:186.00,xL:19.78,yL:61.03,xR:90.46,yR:-129.92) getIntersec firstRadius: 186.00 secondRadius: 186.00 firstX: 19.78 firstY: 61.03 secondX: 90.46 secondY: -129.92 getForwad->getIntersec(distalL:186.00,distalR:186.00,xL:19.78,yL:61.03,xR:90.46,yR:-129.92) getIntersec firstRadius: 186.00 secondRadius: 186.00 firstX: 19.78 firstY: 61.03 secondX: 90.46 secondY: -129.92 getForwad->getIntersec(distalL:186.00,distalR:186.00,xL:17.58,yL:65.00,xR:90.46,yR:-129.92) getIntersec firstRadius: 186.00 secondRadius: 186.00 firstX: 17.58 firstY: 65.00 secondX: 90.46 secondY: -129.92 getForwad->getIntersec(distalL:186.00,distalR:186.00,xL:17.58,yL:65.00,xR:90.46,yR:-129.92) getIntersec firstRadius: 186.00 secondRadius: 186.00 firstX: 17.58 firstY: 65.00 secondX: 90.46 secondY: -129.92 getForwad->getIntersec(distalL:186.00,distalR:186.00,xL:17.58,yL:65.00,xR:95.00,yR:-130.00) getIntersec firstRadius: 186.00 secondRadius: 186.00 firstX: 17.58 firstY: 65.00 secondX: 95.00 secondY: -130.00 getInverse not cantilevered proximalL:130.00 distalL:186.00 xOrigL:-95.00 yOrigL:0.00 x_0:199.05 y_0:24.18 getTheta getIntersec firstRadius: 130.00 secondRadius: 186.00 firstX: -95.00 firstY: 0.00 secondX: 199.05 secondY: 24.18 getTheta use: 1 x2: 26.69 y2: -45.74 thetaB: 339.40 x1: 17.58 y1: 65.00 thetaA: 30.00 getInverse not cantilevered proximalR:130.00 distalR:186.00 xOrigR:95.00 yOrigR:0.00 x_0:199.05 y_0:24.18 getTheta getIntersec firstRadius: 130.00 secondRadius: 186.00 firstX: 95.00 firstY: 0.00 secondX: 199.05 secondY: 24.18 getTheta use: 2 x2: 95.00 y2: -130.00 thetaB: 270.00 x1: 37.68 y1: 116.68 thetaA: 116.16 getInverse cachedInvalid 0 => cachedX0:199.05 cachedY0:24.18 cachedX1:199.05 cachedY1:24.18 cachedXL:17.58 cachedYL:65.00 cachedXR:95.00 cachedYR:-130.00 cachedThetaR:270.00 cachedXR:95.00 cachedYR:-130.00 cachedThetaL:30.00 cachedXL:17.58 cachedYL:65.00 getInverse => cachedInvalid:0 x_0:199.05 y_0:24.18 xL:17.58 yL:65.00 thetaL:30.00 xR:95.00 yR:-130.00 thetaR:270.00 x1:199.05 y1:24.18 getInverse not cantilevered proximalL:130.00 distalL:186.00 xOrigL:-95.00 yOrigL:0.00 x_0:199.05 y_0:24.18 getTheta getIntersec firstRadius: 130.00 secondRadius: 186.00 firstX: -95.00 firstY: 0.00 secondX: 199.05 secondY: 24.18 getTheta use: 1 x2: 26.69 y2: -45.74 thetaB: 339.40 x1: 17.58 y1: 65.00 thetaA: 30.00 getInverse not cantilevered proximalR:130.00 distalR:186.00 xOrigR:95.00 yOrigR:0.00 x_0:199.05 y_0:24.18 getTheta getIntersec firstRadius: 130.00 secondRadius: 186.00 firstX: 95.00 firstY: 0.00 secondX: 199.05 secondY: 24.18 getTheta use: 2 x2: 95.00 y2: -130.00 thetaB: 270.00 x1: 37.68 y1: 116.68 thetaA: 116.16 getInverse cachedInvalid 0 => cachedX0:199.05 cachedY0:24.18 cachedX1:199.05 cachedY1:24.18 cachedXL:17.58 cachedYL:65.00 cachedXR:95.00 cachedYR:-130.00 cachedThetaR:270.00 cachedXR:95.00 cachedYR:-130.00 cachedThetaL:30.00 cachedXL:17.58 cachedYL:65.00 getInverse => cachedInvalid:0 x_0:199.05 y_0:24.18 xL:17.58 yL:65.00 thetaL:30.00 xR:95.00 yR:-130.00 thetaR:270.00 x1:199.05 y1:24.18 getInverse not cantilevered proximalL:130.00 distalL:186.00 xOrigL:-95.00 yOrigL:0.00 x_0:100.00 y_0:200.00 getTheta getIntersec firstRadius: 130.00 secondRadius: 186.00 firstX: -95.00 firstY: 0.00 secondX: 100.00 secondY: 200.00 getTheta use: 1 x2: 32.21 y2: 26.79 thetaB: 11.89 x1: -71.43 y1: 127.85 thetaA: 79.56 getInverse not cantilevered proximalR:130.00 distalR:186.00 xOrigR:95.00 yOrigR:0.00 x_0:100.00 y_0:200.00 getTheta getIntersec firstRadius: 130.00 secondRadius: 186.00 firstX: 95.00 firstY: 0.00 secondX: 100.00 secondY: 200.00 getTheta use: 2 x2: 213.77 y2: 52.85 thetaB: 23.99 x1: -20.98 y1: 58.72 thetaA: 153.15 getInverse cachedInvalid 0 => cachedX0:100.00 cachedY0:200.00 cachedX1:100.00 cachedY1:200.00 cachedXL:-71.43 cachedYL:127.85 cachedXR:213.77 cachedYR:52.85 cachedThetaR:23.99 cachedXR:213.77 cachedYR:52.85 cachedThetaL:79.56 cachedXL:-71.43 cachedYL:127.85 getInverse => cachedInvalid:0 x_0:100.00 y_0:200.00 xL:-71.43 yL:127.85 thetaL:79.56 xR:213.77 yR:52.85 thetaR:23.99 x1:100.00 y1:200.00Error: G0/G1: target position not reachable from current position ok -
After the second pass homing moves, try going back a few degrees using e.g. G1 H2 X-5 Y-5.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
Thank you very much for the answer.
I changed the part in the home5barscara.g file as you said.
G1 H2 X-2 Y-2 F900 -> G1 H2 X-5 Y-5 F900
It still gives the same error.
"Error: G0/G1: target position not reachable from current position"
I can't add the same error output. Akismet detects it as spam.
-
@rutku my suggestion was not to change the backup move you already had, but to add another backup move after the second pair of homing commands. I made this suggestion because on serial SCARA printers, this is necessary before you can do a G1 move after homing.
Does a G0 move succeed?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@rutku said in Five bar Parallel SCARA print area problem:
M208 X1000:-1000 Y1000:-1000 ; set axis minima and maxima
hello, nice to see another example of a parallel scara. Welcome!
M208 looks strange
M208 X1000:-1000 Y1000:-1000 ; set axis minima and maxima
I would set minima to -1000 and maxima to 1000.
So
M208 X-1000:1000 Y-1000:1000The
G0 X0 Y0 F6000 ; move to a reasonable position
in the homing file should give an error already.Another possibility is that an angle restriction limit is reached, in parameter A.
And please check parameter C also, if I rember well, the values should be ordered min-max, so the low values first:
instead of C270:0:0:270
take
C0:270:0:270 -
Yes, now I get it. Thanks ... I added as below. I got the same error again.
home5barscara.g
G91 ; relative positioning G1 H1 X100 Y300 F900 ; move quickly to endstop and stop there (first pass) G1 H1 X300 F900 G1 H1 Y300 F900 G1 H2 X-2 Y-2 F900 ; go back a few degrees G1 H1 X100 F90 ; move slowly to endstop once more (second pass) G1 H1 Y100 F90 ; move slowly to endstop once more (second pass) G1 H2 X-5 Y-5 F900 ; go back a few degrees G92 Z0 G90 ; absolute positioning G0 X0 Y0 F6000 ; move to a reasonable positionG0 X0 Y0 F6000 command was not successful. The error output I received;
G0 X0 Y0 F6000 getInverse not cantilevered proximalL:130.00 distalL:186.00 xOrigL:-95.00 yOrigL:0.00 x_0:0.00 y_0:0.00 getTheta getIntersec firstRadius: 130.00 secondRadius: 186.00 firstX: -95.00 firstY: 0.00 secondX: 0.00 secondY: 0.00 getTheta use: 1 x2: -140.64 y2: -121.73 thetaB: 249.45 x1: -140.64 y1: 121.73 thetaA: 110.55 getInverse not cantilevered proximalR:130.00 distalR:186.00 xOrigR:95.00 yOrigR:0.00 x_0:0.00 y_0:0.00 getTheta getIntersec firstRadius: 130.00 secondRadius: 186.00 firstX: 95.00 firstY: 0.00 secondX: 0.00 secondY: 0.00 getTheta use: 2 x2: 140.64 y2: 121.73 thetaB: 69.45 x1: 140.64 y1: -121.73 thetaA: 290.55 getInverse cachedInvalid 0 => cachedX0:0.00 cachedY0:0.00 cachedX1:0.00 cachedY1:0.00 cachedXL:-140.64 cachedYL:121.73 cachedXR:140.64 cachedYR:121.73 cachedThetaR:69.45 cachedXR:140.64 cachedYR:121.73 cachedThetaL:110.55 cachedXL:-140.64 cachedYL:121.73 getInverse => cachedInvalid:0 x_0:0.00 y_0:0.00 xL:-140.64 yL:121.73 thetaL:110.55 xR:140.64 yR:121.73 thetaR:69.45 x1:0.00 y1:0.00Error: G0/G1: target position not reachable from current position ok -
hello, thank you very much. I did what you said. It made very limited movements. moved in negative directions. I could not understand how to solve it. I am sending it as a video.
-
This post is deleted! -
@rutku ok I think I found something:
according to https://duet3d.dozuki.com/Guide/Five+Bar+Parallel+SCARA/24#s90 the B parameter the homing position are the degrees in respect to the X axis, so the first one has angle 30 degree, but the second one -90 degree.
You can try the current endstops and set the second endstop position to -90 instead of 270. B30:-90 and force work mode 1 with L1.
Reason for workmode 1 please see https://duet3d.dozuki.com/Guide/Five+Bar+Parallel+SCARA/24#s92If this doesn't work because of the negative second endstop angle, maybe you can place your second endstop so you can use working mode 1 with eg 30 degree for the second endstop also.
I am not sure whether I have tested negative endstop angles. But please try, it may work. This is faster than to change the endstop location.
The print area for workmode 1 and your homing position is near the edge of the printable area, which may mean in this area movement is critical (maybe even near a singularity). After homing it is better to rotate both arms forward to say 90 degree each (but remove the chair/laptop before doing this
") ) . This is a safe area for testing movements.
) . This is a safe area for testing movements.You have to change parameter C to include -90 for the second homing position also:
C0:270:-90:270 -
Hi, I did what you said. I get the same mistake. Perhaps the problem is in coordinates. I have moved the computer not improved :). It is not moved to 0 points of X and Y coordinates. I think it needs to make offset.
I have changed the first endstop flour. Again was the same mistake.
config.g... M669 K9 L1 X-95:95 Y0:0 P130:130 D186:186:0:0 B-20:-90 A15:165:0:360:0:360 C-20:270:-90:270 ... ; Endstops M574 X2 S1 P"xstop" ; X min active high endstop switch M574 Y2 S1 P"ystop" ; Y min active high endstop switch
-
@rutku it looks to mew that X0 Y0 is not reachable on your machine because of its geometry. Does it work if you command it to reachable coordinates?
The serial SCARA kinematics allow you to shift the X0 Y0 position using X and Y parameters in the M669 command. Perhaps @JoergS5 can tell you whether the five-bar kinematics provides a similar feature.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 said in Five bar Parallel SCARA print area problem:
Perhaps @JoergS5 can tell you whether the five-bar kinematics provides a similar feature.
yes, https://duet3d.dozuki.com/Guide/Five+Bar+Parallel+SCARA/24#s90 documents to set X and X for the actuator positions: absolute coordinates and how far they are away from each other.
But even if you change the coordinates, the position itself is still unreachable or at the edge of the reachable area. Preferable would be to place the second endstop to a similar 30 degree position like the first one and use L1 mode, work mode 1. Then after homing, the printer is in a comfortable print area.
-
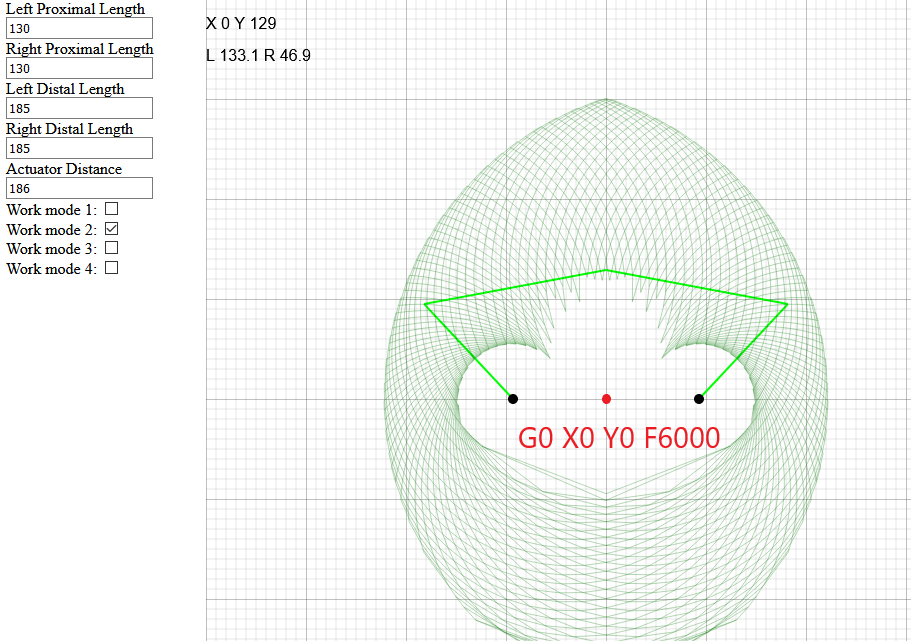
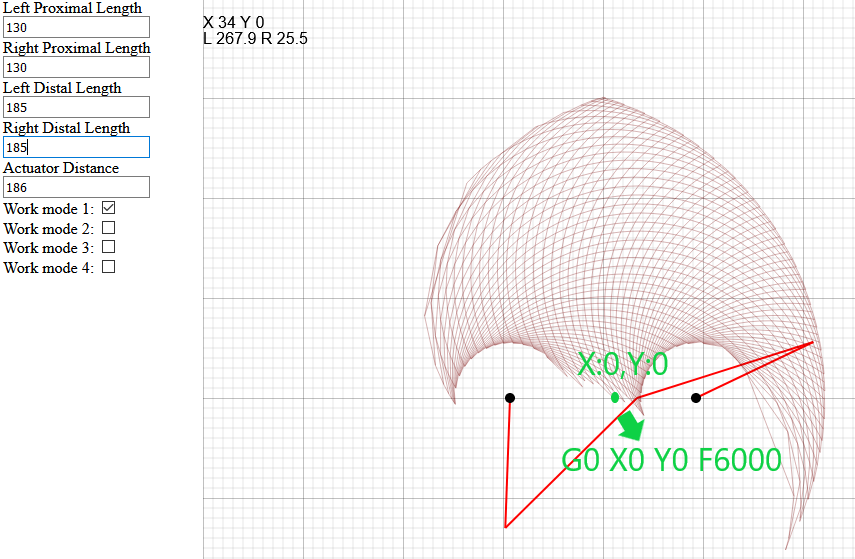
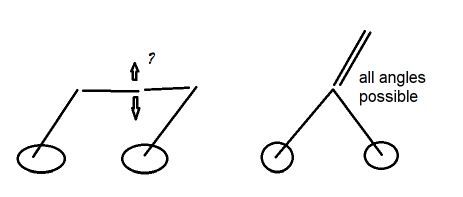
@rutku please try
- the homing positions should place the proximal arms in a position like in the images for workmode 1 or 2
- the actuators have far distance, in your first picture you're already near of the singularity: the distal arms are nearly horizontal, which means you need a lot of force to rotate and when they are horizontal, the arms can move up or down, which means if youre unlucky, they move down. Better make the distal arms a bit longer (or use workmode 1)
In your last image, you changed one endstop, but I meant the other one, so both proximal arms are "above" the X axis.
I mean like this for workmode L1:
-
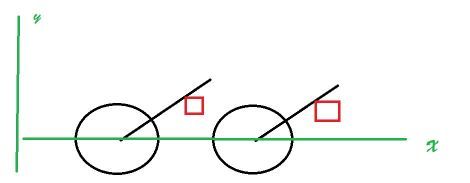
To explain the work modes: every proximal arm has two possible solutions. The workmode tells which one to take. Example:
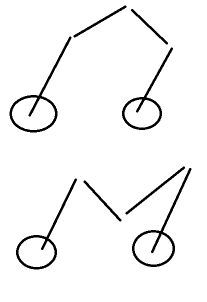
The firmware cannot decide which one to use from the actuator information and arm length information alone. Workmode 1 says to use the first one always.Your last image shows something similar to workmode 3: proximal arms are direction down. Distal arms are looking up. This mode is not supported yet. I wanted to avoid workmodes, but as explained there must be decided somehow which of the two possibilities is the correct one.
-
By singularities and avoid too big actuator distances I mean:
The first one is when the distal arms are horizontally. Then actuator rotation forces the arms to go up or down, which is very bad if you want only workmode 1, distal arms being upward. Another disadvantage if you're near this situation is that the actuators need more force than normal to rotate and the resulting position is less accurate.
The second case is if the proximal arms are rotated so they result in one destination point. Then the distal arms' angle is totally unspecified.
-
@dc42 said in Five bar Parallel SCARA print area problem:
@rutku it looks to mew that X0 Y0 is not reachable on your machine because of its geometry. Does it work if you command it to reachable coordinates?
Yes, it makes limited movements. X 200 -> 185~ Y 29 -> 78
@JoergS5 Thanks, you explained very well like a teacher :).

I did what you said. I still get the same error. My idea is that enstopes should be used and removed once. Because the arms want to move behind. I ordered an optical sensor. I will try it. Because arms want to be free.
config.g
M669 K9 L1 X-95:95 Y0:0 P130:130 D186:186:0:0 B30:30 A15:165:0:360:0:360 C30:270:30:270 ; Endstops M574 X1 S1 P"xstop" ; X min active high endstop switch M574 Y1 S1 P"ystop" ; Y min active high endstop switcherror code:
M120 G91 G1 X10 F6000 G90 M121 Error: G0/G1: target position not reachable from current position -
@rutku G1 X10 means you want to go to a position a bit right (right in the sense of X-Axis direction) of the homing position. This would mean you have to rotate the actuators to an angle smaller 30 degree. This is not allowed (C parameter 30 limit, and your current endstop type).
After homing, please try G1 X-10 first several times to get away from the homing position. Maybe you have to move Y a bit at the same time at the beginning, like G1 X-10 Y10
...limited movements. X 200 -> 185~ Y 29 -> 78
makes sense: the print area is in the diminishing X, and bigger actuator angles mean the hotend moves to a higher Y.Depending on your hardware,
M350 X128 Y128 I1
may be a too high microstepping value. You can check whether you get lost steps by making some movements, then calling M122 and look at the hiccups value. A high number would mean you loose steps. Often 16 microsteps are used, M350 X16 Y16 I1 -
@joergs5 Hi, I did what you said. However, I'm getting the same mistake again. In the output of debug ThetaL: 249.5 ThetaR: 69.45.
config.g
M350 X16 Y16 I1 ;S3 ; Configure microstepping with interpolation M669 K9 L1 X-95:95 Y0:0 P130:130 D186:186:0:0 B30:30 A15:165:0:360:0:360 C-90:270:-90:270 M92 X115.555556 Y115.555556 ; Set steps per mmDebug Output
getInverse not cantilevered proximalL:130.00 distalL:186.00 xOrigL:-95.00 yOrigL:0.00 x_0:0.00 y_0:0.00 getTheta getIntersec firstRadius: 130.00 secondRadius: 186.00 firstX: -95.00 firstY: 0.00 secondX: 0.00 secondY: 0.00 getTheta use: 2 x2: -140.64 y2: -121.73 thetaB: 249.45 x1: -140.64 y1: 121.73 thetaA: 110.55 getInverse not cantilevered proximalR:130.00 distalR:186.00 xOrigR:95.00 yOrigR:0.00 x_0:0.00 y_0:0.00 getTheta getIntersec firstRadius: 130.00 secondRadius: 186.00 firstX: 95.00 firstY: 0.00 secondX: 0.00 secondY: 0.00 getTheta use: 2 x2: 140.64 y2: 121.73 thetaB: 69.45 x1: 140.64 y1: -121.73 thetaA: 290.55 getInverse cachedInvalid 0 => cachedX0:0.00 cachedY0:0.00 cachedX1:0.00 cachedY1:0.00 cachedXL:-140.64 cachedYL:-121.73 cachedXR:140.64 cachedYR:121.73 cachedThetaR:69.45 cachedXR:140.64 cachedYR:121.73 cachedThetaL:249.45 cachedXL:-140.64 cachedYL:-121.73 getInverse => cachedInvalid:0 x_0:0.00 y_0:0.00 xL:-140.64 yL:-121.73 thetaL:249.45 xR:140.64 yR:121.73 thetaR:69.45 x1:0.00 y1:0.00 constraintsOK->cachedInvalid:0 actuatorAngleLMin:-90.00<0 && thetaL:249.45>actuatorAngleLMax:270.00 constraintsOK->cachedInvalid:0 thetaL:249.45 < actuatorAngleLMin:-90.00 || thetaL:249.45 > actuatorAngleLMax:270.00 return false constraintsOK->cachedInvalid:0 actuatorAngleRMin:-90.00<0 && thetaR:69.45>actuatorAngleRMax:270.00 constraintsOK->cachedInvalid:0 thetaR:69.45 < actuatorAngleRMin:-90.00 || thetaR:69.45 > actuatorAngleRMax:270.00 return false constraintsOK->cachedInvalid:0 headAngle:180.00 < headAngleMin:15.00 || headAngle:180.00 > headAngleMax:165.00 isnan(headAngle):0 return false -
@rutku said in Five bar Parallel SCARA print area problem:
=> Please comment out the G0 Y0 Y0 line at the end of the homing file, so the values when the endstops are triggered can be controlled.
Then start Duet, and run the homing file. Both endstops must be triggered. Please report M114.
ThetaL and ThetaR should be 30 each at the homing position.
I suspect that the G0 X0 Y0, which is at the end of the homing file, is not reachable. My documentation in https://duet3d.dozuki.com/Guide/Five+Bar+Parallel+SCARA/24#s92 is only a draft of the printable area.
ThetaL: 249.5 (= 180 + 69.5) ThetaR: 69.45.
mean the both arms are nearly in opposite positions, and singularity example 1 of my explanation above is met: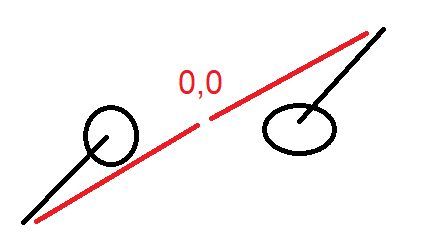
-
@joergs5 How could it be? I have printed almost all values in the FiveBarScaraKinematics.cpp file. I am adding all my settings and outputs again. I am adding the video of the process steps.
config.g
; General preferences G90 ; Send absolute coordinates... M83 ; ...but relative extruder moves M552 S1 ; Turn network on M586 P0 S1 ; Enable HTTP M586 P1 S0 ; Enable FTP M586 P2 S0 ; Enable Telnet ; Drives M569 P0 S1 ; Drive 0 (X) goes forwards M569 P1 S1 ; Drive 1 (Y) goes forwards ;M569 P2 S1 ; Drive 2 (Z) goes forwards ;M569 P3 S1 ; Drive 3 (E0) goes forwards M584 X0 Y1 ; set drive mapping M350 X16 Y16 I1 ;S3 ; Configure microstepping with interpolation M669 K9 L1 X-95:95 Y0:0 P130:130 D210:210:0:0 B30:30 A15:165:0:360:0:360 C-90:270:-90:270 M92 X115.555556 Y115.555556 ; Set steps per mm M203 X10000 Y10000 ; maximum speeds mm/minute M566 X15 Y15 ; Set maximum instantaneous speed changes (mm/min) M201 X40 Y40 ; Set accelerations (mm/s^2) M906 X1200 Y1200 ; Set motor currents (mA) and motor idle factor in per cent M84 S0 ; Set idle timeout ; Axis Limits M208 X-1000:1000 Y-1000:1000 ; set axis minima and maxima ; Endstops M574 X1 S1 P"xstop" ; X min active high endstop switch M574 Y1 S1 P"ystop" ; Y min active high endstop switch ;M574 Z0 S1 P"zstop" ; Z min active high endstop switchhome5barscara.g
G91 ; relative positioning G1 H1 X100 Y300 F900 ; move quickly to endstop and stop there (first pass) G1 H1 X300 F900 G1 H1 Y300 F900 G1 H2 X-2 Y-2 F900 ; go back a few degrees G1 H1 X100 F90 ; move slowly to endstop once more (second pass) G1 H1 Y100 F90 ; move slowly to endstop once more (second pass) G1 H2 X-5 Y-5 F900 ; go back a few degrees G92 Z0 G90 ; absolute positioning G0 X0 Y0 ; move to a reasonable positionoutputs:
m115 FIRMWARE_NAME: RepRapFirmware for STM32F4 based Boards FIRMWARE_VERSION: 3.2.2_2 ELECTRONICS: STM32F4 FIRMWARE_DATE: 2021-05-02 ok WiFi module is connected to access point Utku, IP address 192.168.1.3 MotorStepsToCartesian => thetaL:224.27=MotorPosX:25916.00/StepsPermmX:115.56 MotorStepsToCartesian => thetaR:224.27=MotorPosY:3467.00/StepsPermmY:115.56 getForwad->getIntersec(distalL:210.00,distalR:210.00,xL:-188.08,yL:-90.75,xR:207.58,yR:65.01) getIntersec firstRadius: 210.00 secondRadius: 210.00 firstX: -188.08 firstY: -90.75 secondX: 207.58 secondY: 65.01 MotorStepsToCartesian => MachinePosX:nan MachinePosY:nan XYZ_AXES:3 numVisibleAxes:3 MotorStepsToCartesian => thetaL:224.27=MotorPosX:25916.00/StepsPermmX:115.56 MotorStepsToCartesian => thetaR:224.27=MotorPosY:3467.00/StepsPermmY:115.56 getForwad->getIntersec(distalL:210.00,distalR:210.00,xL:-188.08,yL:-90.75,xR:207.58,yR:65.01) getIntersec firstRadius: 210.00 secondRadius: 210.00 firstX: -188.08 firstY: -90.75 secondX: 207.58 secondY: 65.01 MotorStepsToCartesian => MachinePosX:nan MachinePosY:nan XYZ_AXES:3 numVisibleAxes:3 MotorStepsToCartesian => thetaL:30.00=MotorPosX:3467.00/StepsPermmX:115.56 MotorStepsToCartesian => thetaR:30.00=MotorPosY:3467.00/StepsPermmY:115.56 getForwad->getIntersec(distalL:210.00,distalR:210.00,xL:17.58,yL:65.01,xR:207.58,yR:65.01) getIntersec firstRadius: 210.00 secondRadius: 210.00 firstX: 17.58 firstY: 65.01 secondX: 207.58 secondY: 65.01 MotorStepsToCartesian => MachinePosX:112.58 MachinePosY:252.29 XYZ_AXES:3 numVisibleAxes:3 MotorStepsToCartesian => thetaL:30.00=MotorPosX:3467.00/StepsPermmX:115.56 MotorStepsToCartesian => thetaR:30.00=MotorPosY:3467.00/StepsPermmY:115.56 getForwad->getIntersec(distalL:210.00,distalR:210.00,xL:17.58,yL:65.01,xR:207.58,yR:65.01) getIntersec firstRadius: 210.00 secondRadius: 210.00 firstX: 17.58 firstY: 65.01 secondX: 207.58 secondY: 65.01 MotorStepsToCartesian => MachinePosX:112.58 MachinePosY:252.29 XYZ_AXES:3 numVisibleAxes:3 MotorStepsToCartesian => thetaL:30.00=MotorPosX:3467.00/StepsPermmX:115.56 MotorStepsToCartesian => thetaR:30.00=MotorPosY:3467.00/StepsPermmY:115.56 getForwad->getIntersec(distalL:210.00,distalR:210.00,xL:17.58,yL:65.01,xR:207.58,yR:65.01) getIntersec firstRadius: 210.00 secondRadius: 210.00 firstX: 17.58 firstY: 65.01 secondX: 207.58 secondY: 65.01 MotorStepsToCartesian => MachinePosX:112.58 MachinePosY:252.29 XYZ_AXES:3 numVisibleAxes:3 MotorStepsToCartesian => thetaL:28.00=MotorPosX:3236.00/StepsPermmX:115.56 MotorStepsToCartesian => thetaR:28.00=MotorPosY:3236.00/StepsPermmY:115.56 getForwad->getIntersec(distalL:210.00,distalR:210.00,xL:19.78,yL:61.04,xR:209.78,yR:61.04) getIntersec firstRadius: 210.00 secondRadius: 210.00 firstX: 19.78 firstY: 61.04 secondX: 209.78 secondY: 61.04 MotorStepsToCartesian => MachinePosX:114.78 MachinePosY:248.32 XYZ_AXES:3 numVisibleAxes:3 MotorStepsToCartesian => thetaL:28.00=MotorPosX:3236.00/StepsPermmX:115.56 MotorStepsToCartesian => thetaR:28.00=MotorPosY:3236.00/StepsPermmY:115.56 getForwad->getIntersec(distalL:210.00,distalR:210.00,xL:19.78,yL:61.04,xR:209.78,yR:61.04) getIntersec firstRadius: 210.00 secondRadius: 210.00 firstX: 19.78 firstY: 61.04 secondX: 209.78 secondY: 61.04 MotorStepsToCartesian => MachinePosX:114.78 MachinePosY:248.32 XYZ_AXES:3 numVisibleAxes:3 MotorStepsToCartesian => thetaL:30.00=MotorPosX:3467.00/StepsPermmX:115.56 MotorStepsToCartesian => thetaR:30.00=MotorPosY:3236.00/StepsPermmY:115.56 getForwad->getIntersec(distalL:210.00,distalR:210.00,xL:17.58,yL:65.01,xR:209.78,yR:61.04) getIntersec firstRadius: 210.00 secondRadius: 210.00 firstX: 17.58 firstY: 65.01 secondX: 209.78 secondY: 61.04 MotorStepsToCartesian => MachinePosX:117.53 MachinePosY:249.69 XYZ_AXES:3 numVisibleAxes:3 MotorStepsToCartesian => thetaL:30.00=MotorPosX:3467.00/StepsPermmX:115.56 MotorStepsToCartesian => thetaR:30.00=MotorPosY:3236.00/StepsPermmY:115.56 getForwad->getIntersec(distalL:210.00,distalR:210.00,xL:17.58,yL:65.01,xR:209.78,yR:61.04) getIntersec firstRadius: 210.00 secondRadius: 210.00 firstX: 17.58 firstY: 65.01 secondX: 209.78 secondY: 61.04 MotorStepsToCartesian => MachinePosX:117.53 MachinePosY:249.69 XYZ_AXES:3 numVisibleAxes:3 MotorStepsToCartesian => thetaL:30.00=MotorPosX:3467.00/StepsPermmX:115.56 MotorStepsToCartesian => thetaR:30.00=MotorPosY:3467.00/StepsPermmY:115.56 getForwad->getIntersec(distalL:210.00,distalR:210.00,xL:17.58,yL:65.01,xR:207.58,yR:65.01) getIntersec firstRadius: 210.00 secondRadius: 210.00 firstX: 17.58 firstY: 65.01 secondX: 207.58 secondY: 65.01 MotorStepsToCartesian => MachinePosX:112.58 MachinePosY:252.29 XYZ_AXES:3 numVisibleAxes:3 MotorStepsToCartesian => thetaL:30.00=MotorPosX:3467.00/StepsPermmX:115.56 MotorStepsToCartesian => thetaR:30.00=MotorPosY:3467.00/StepsPermmY:115.56 getForwad->getIntersec(distalL:210.00,distalR:210.00,xL:17.58,yL:65.01,xR:207.58,yR:65.01) getIntersec firstRadius: 210.00 secondRadius: 210.00 firstX: 17.58 firstY: 65.01 secondX: 207.58 secondY: 65.01 MotorStepsToCartesian => MachinePosX:112.58 MachinePosY:252.29 XYZ_AXES:3 numVisibleAxes:3 MotorStepsToCartesian => thetaL:25.00=MotorPosX:2889.00/StepsPermmX:115.56 MotorStepsToCartesian => thetaR:25.00=MotorPosY:2889.00/StepsPermmY:115.56 getForwad->getIntersec(distalL:210.00,distalR:210.00,xL:22.82,yL:54.94,xR:212.82,yR:54.94) getIntersec firstRadius: 210.00 secondRadius: 210.00 firstX: 22.82 firstY: 54.94 secondX: 212.82 secondY: 54.94 MotorStepsToCartesian => MachinePosX:117.82 MachinePosY:242.23 XYZ_AXES:3 numVisibleAxes:3 constraintsOK->cachedInvalid:0 cachedX0:0.00 cachedY0:0.00 getInverse not cantilevered proximalL:130.00 distalL:210.00 xOrigL:-95.00 yOrigL:0.00 x_0:117.82 y_0:242.23 getTheta getIntersec firstRadius: 130.00 secondRadius: 210.00 firstX: -95.00 firstY: 0.00 secondX: 117.82 secondY: 242.23 getTheta use: 2 x2: 22.82 y2: 54.94 thetaB: 25.00 x1: -55.68 y1: 123.91 thetaA: 72.39 getInverse not cantilevered proximalR:130.00 distalR:210.00 xOrigR:95.00 yOrigR:0.00 x_0:117.82 y_0:242.23 getTheta getIntersec firstRadius: 130.00 secondRadius: 210.00 firstX: 95.00 firstY: 0.00 secondX: 117.82 secondY: 242.23 getTheta use: 2 x2: 212.82 y2: 54.94 thetaB: 25.00 x1: -10.49 y1: 75.98 thetaA: 144.24 getInverse cachedInvalid 0 => cachedX0:117.82 cachedY0:242.23 cachedX1:117.82 cachedY1:242.23 cachedXL:22.82 cachedYL:54.94 cachedXR:212.82 cachedYR:54.94 cachedThetaR:25.00 cachedXR:212.82 cachedYR:54.94 cachedThetaL:25.00 cachedXL:22.82 cachedYL:54.94 getInverse => cachedInvalid:0 x_0:117.82 y_0:242.23 xL:22.82 yL:54.94 thetaL:25.00 xR:212.82 yR:54.94 thetaR:25.00 x1:117.82 y1:242.23 constraintsOK->cachedInvalid:0 actuatorAngleLMin:-90.00<0 && thetaL:25.00>actuatorAngleLMax:270.00 constraintsOK->cachedInvalid:0 thetaL:25.00 < actuatorAngleLMin:-90.00 || thetaL:25.00 > actuatorAngleLMax:270.00 return false constraintsOK->cachedInvalid:0 actuatorAngleRMin:-90.00<0 && thetaR:25.00>actuatorAngleRMax:270.00 constraintsOK->cachedInvalid:0 thetaR:25.00 < actuatorAngleRMin:-90.00 || thetaR:25.00 > actuatorAngleRMax:270.00 return false constraintsOK->cachedInvalid:0 headAngle:53.79 < headAngleMin:15.00 || headAngle:53.79 > headAngleMax:165.00 isnan(headAngle):0 return false constraintsOK->cachedInvalid:0 angleProxDistL:218.10 < proxDistLAngleMin:0.00 || angleProxDistL:218.10 > proxDistLAngleMax:360.00 isnan(angleProxDistL):0 return false constraintsOK->cachedInvalid:0 angleProxDistR:271.90 < proxDistRAngleMin:0.00 || angleProxDistR:271.90 > proxDistRAngleMax:360.00 isnan(angleProxDistR):0 return false constraintsOK->cachedInvalid:0 cachedX0:117.82 cachedY0:242.23 CartesianToMotorSteps => motorPosX = cachedThetaL:25.00 * stespPermm[X_AXIS]115.56 motorPosY = cachedThetaR:25.00 * stepsPermm[Y_AXIS]115.56 CartesianToMotorSteps => machinePos[0]:117.82 machinePos[1]:242.23 motorPosX:0.00 motorPosY:115.56 CartesianToMotorSteps => XYZ_AXES:3 numVisibleAxes:3 constraintsOK->cachedInvalid:0 cachedX0:117.82 cachedY0:242.23 CartesianToMotorSteps => motorPosX = cachedThetaL:25.00 * stespPermm[X_AXIS]115.56 motorPosY = cachedThetaR:25.00 * stepsPermm[Y_AXIS]115.56 CartesianToMotorSteps => machinePos[0]:117.82 machinePos[1]:242.23 motorPosX:0.00 motorPosY:115.56 CartesianToMotorSteps => XYZ_AXES:3 numVisibleAxes:3 constraintsOK->cachedInvalid:0 cachedX0:117.82 cachedY0:242.23 getInverse not cantilevered proximalL:130.00 distalL:210.00 xOrigL:-95.00 yOrigL:0.00 x_0:0.00 y_0:0.00 getTheta getIntersec firstRadius: 130.00 secondRadius: 210.00 firstX: -95.00 firstY: 0.00 secondX: 0.00 secondY: 0.00 getTheta use: 2 x2: -190.66 y2: -88.03 thetaB: 222.62 x1: -190.66 y1: 88.03 thetaA: 137.38 getInverse not cantilevered proximalR:130.00 distalR:210.00 xOrigR:95.00 yOrigR:0.00 x_0:0.00 y_0:0.00 getTheta getIntersec firstRadius: 130.00 secondRadius: 210.00 firstX: 95.00 firstY: 0.00 secondX: 0.00 secondY: 0.00 getTheta use: 2 x2: 190.66 y2: 88.03 thetaB: 42.62 x1: 190.66 y1: -88.03 thetaA: 317.38 getInverse cachedInvalid 0 => cachedX0:0.00 cachedY0:0.00 cachedX1:0.00 cachedY1:0.00 cachedXL:-190.66 cachedYL:-88.03 cachedXR:190.66 cachedYR:88.03 cachedThetaR:42.62 cachedXR:190.66 cachedYR:88.03 cachedThetaL:222.62 cachedXL:-190.66 cachedYL:-88.03 getInverse => cachedInvalid:0 x_0:0.00 y_0:0.00 xL:-190.66 yL:-88.03 thetaL:222.62 xR:190.66 yR:88.03 thetaR:42.62 x1:0.00 y1:0.00 constraintsOK->cachedInvalid:0 actuatorAngleLMin:-90.00<0 && thetaL:222.62>actuatorAngleLMax:270.00 constraintsOK->cachedInvalid:0 thetaL:222.62 < actuatorAngleLMin:-90.00 || thetaL:222.62 > actuatorAngleLMax:270.00 return false constraintsOK->cachedInvalid:0 actuatorAngleRMin:-90.00<0 && thetaR:42.62>actuatorAngleRMax:270.00 constraintsOK->cachedInvalid:0 thetaR:42.62 < actuatorAngleRMin:-90.00 || thetaR:42.62 > actuatorAngleRMax:270.00 return false constraintsOK->cachedInvalid:0 headAngle:180.00 < headAngleMin:15.00 || headAngle:180.00 > headAngleMax:165.00 isnan(headAngle):0 return false constraintsOK->cachedInvalid:1 cachedX0:0.00 cachedY0:0.00 getInverse not cantilevered proximalL:130.00 distalL:210.00 xOrigL:-95.00 yOrigL:0.00 x_0:0.00 y_0:0.00 getTheta getIntersec firstRadius: 130.00 secondRadius: 210.00 firstX: -95.00 firstY: 0.00 secondX: 0.00 secondY: 0.00 getTheta use: 2 x2: -190.66 y2: -88.03 thetaB: 222.62 x1: -190.66 y1: 88.03 thetaA: 137.38 getInverse not cantilevered proximalR:130.00 distalR:210.00 xOrigR:95.00 yOrigR:0.00 x_0:0.00 y_0:0.00 getTheta getIntersec firstRadius: 130.00 secondRadius: 210.00 firstX: 95.00 firstY: 0.00 secondX: 0.00 secondY: 0.00 getTheta use: 2 x2: 190.66 y2: 88.03 thetaB: 42.62 x1: 190.66 y1: -88.03 thetaA: 317.38 getInverse cachedInvalid 0 => cachedX0:0.00 cachedY0:0.00 cachedX1:0.00 cachedY1:0.00 cachedXL:-190.66 cachedYL:-88.03 cachedXR:190.66 cachedYR:88.03 cachedThetaR:42.62 cachedXR:190.66 cachedYR:88.03 cachedThetaL:222.62 cachedXL:-190.66 cachedYL:-88.03 getInverse => cachedInvalid:0 x_0:0.00 y_0:0.00 xL:-190.66 yL:-88.03 thetaL:222.62 xR:190.66 yR:88.03 thetaR:42.62 x1:0.00 y1:0.00 constraintsOK->cachedInvalid:0 actuatorAngleLMin:-90.00<0 && thetaL:222.62>actuatorAngleLMax:270.00 constraintsOK->cachedInvalid:0 thetaL:222.62 < actuatorAngleLMin:-90.00 || thetaL:222.62 > actuatorAngleLMax:270.00 return false constraintsOK->cachedInvalid:0 actuatorAngleRMin:-90.00<0 && thetaR:42.62>actuatorAngleRMax:270.00 constraintsOK->cachedInvalid:0 thetaR:42.62 < actuatorAngleRMin:-90.00 || thetaR:42.62 > actuatorAngleRMax:270.00 return false constraintsOK->cachedInvalid:0 headAngle:180.00 < headAngleMin:15.00 || headAngle:180.00 > headAngleMax:165.00 isnan(headAngle):0 return falseM114 outputs:
m114 X:117.819 Y:242.226 Z:0.000 E:0.000 E0:0.0 Count 2889 2889 0 Machine 117.819 242.226 0.000 Bed comp 0.000 ok