Extruder motor doesn't move
-
@phaedrux I want to send the temperature signal from PID to the Duet board, do I need adapters to do it? I saw online there's some kind of daughter board for thermocouple. I'm using Duet 2 ethernet, which daughter board should I purchase?
-
Can you give more info on your external temperature controller?
-
@phaedrux It's a very common Inkbird PID controller. The thermocouple from the extruder head is a K-type thermocouple.

-
If the thermocouple is already going to the PID controller how do you hope to connect it to the Duet as well?
Do you have a link for that unit?
-
@phaedrux I plan to use a dual thermocouple connector to split the thermocouple signal, so that one goes to the PID and the other goes to the Duet board.
-
Ok, yes if you've got a dual thermocouple with two junctions with their own wires then yes, you could run one to the controller and one to the Duet. You would need the Duet Thermocouple Daughterboard to be able to read the temp.
https://duet3d.dozuki.com/Wiki/Thermocouple_daughter_board
https://duet3d.dozuki.com/Wiki/Connecting_thermocouples -
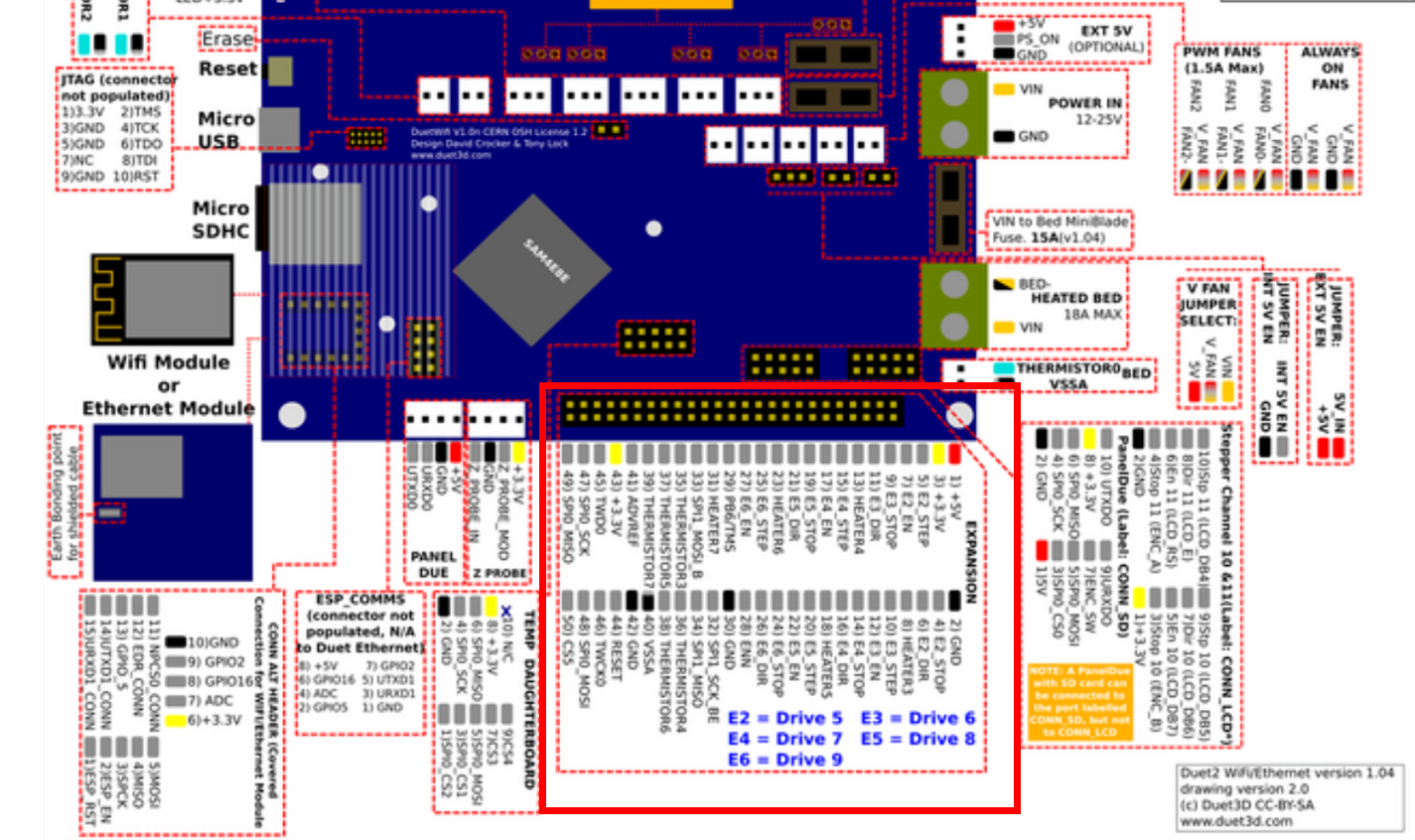
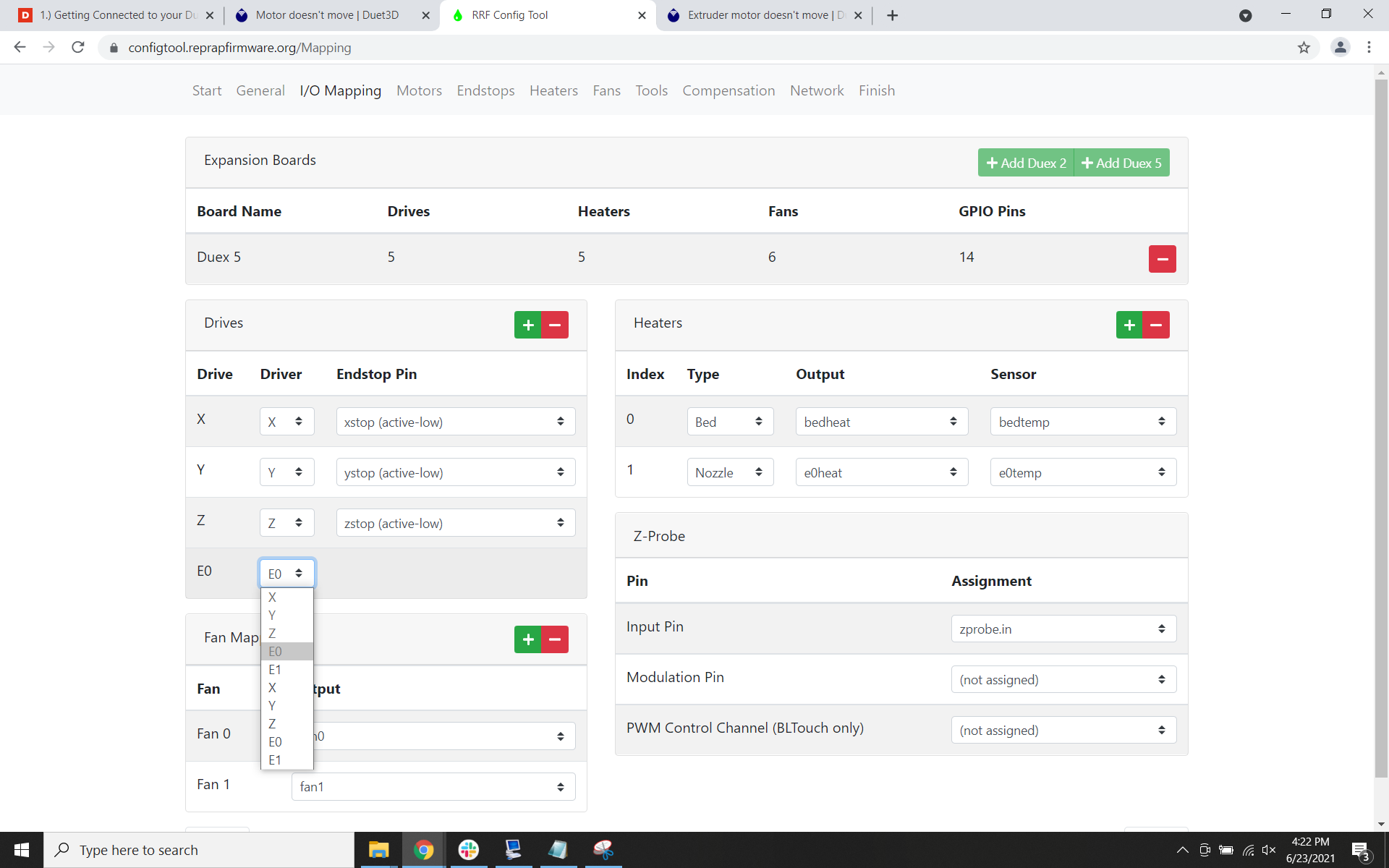
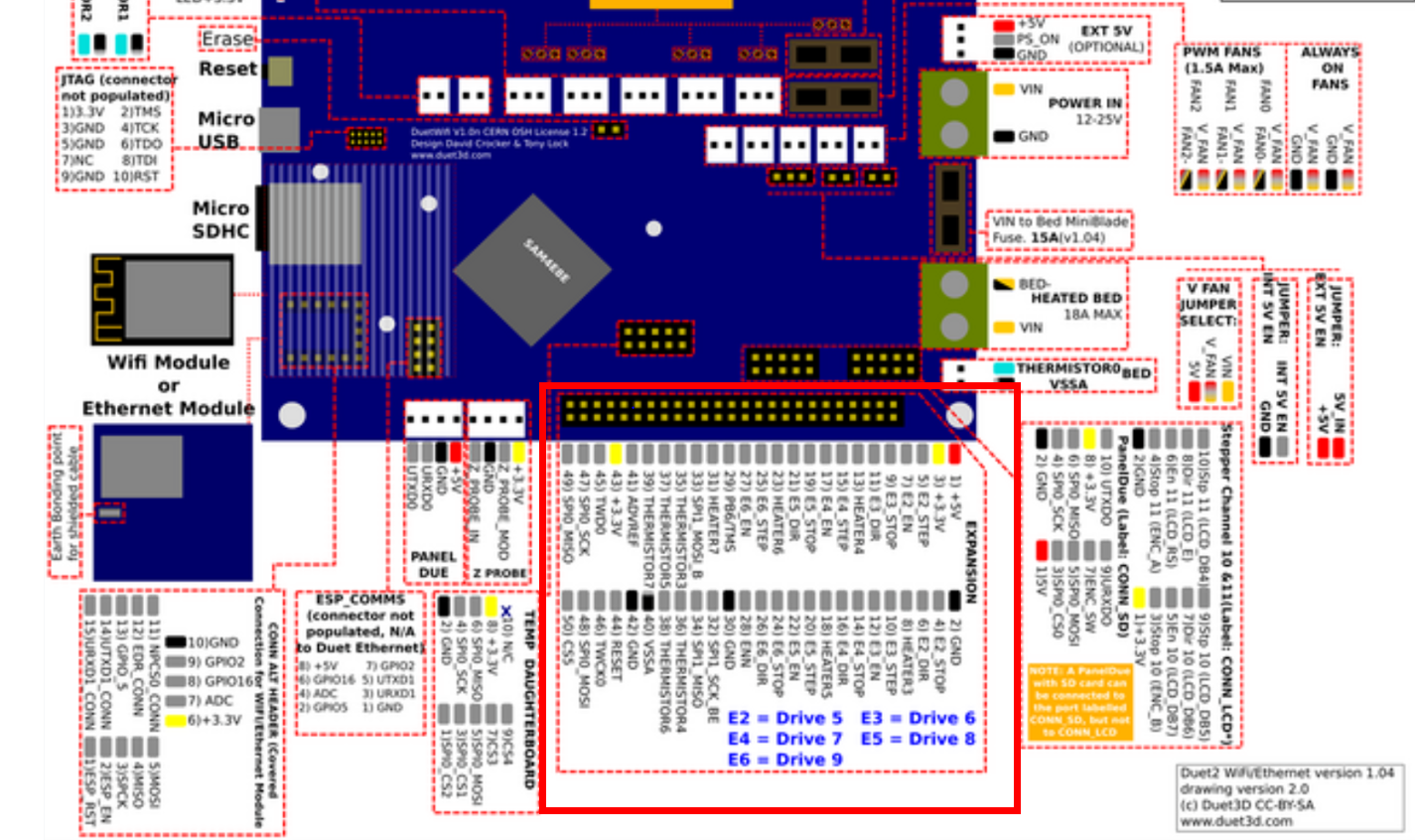
Hi, now the temperature is all set, but I have some problems with the extruder motor. I used the expansion portion (highlighted in the red square shown below) of the board for extruder signals. The channels I connected are E2, but I couldn't setup the config file to use the E2 motor because it isn't listed.
-
You'll need to alter the config manually to add non-standard mappings.
-
@phaedrux Could you please explain how to do that?
-
If you're using E2 that equates to driver 5 on the duex.
So in your M584 command, For the extruder drives you would list all the extruder that will be connected to the main Duet drivers and then add 5 for the expansion header.
M584 X0 Y1 Z2:3 E4:5just as an example.Have you seen this yet? https://duet3d.dozuki.com/Wiki/Using_external_stepper_motor_drivers
-
@phaedrux Hi, my extruder motor needs 5V, while the Duet board output is 3.3V, I'm thinking of buying a breakout board like this:
https://duet3d.dozuki.com/Wiki/Duet_Expansion_Breakout_Board
Will it work? -
@zfeng said in Extruder motor doesn't move:
my extruder motor needs 5V,
I'm not sure what you mean by this. The stepper motor drivers are constant current drivers. The rated voltage on the motor isn't a requirement.
-
@phaedrux I'm not using motor drive output, I'm using the expansion portion of the board, which is 3.3V output. But my extruder motor needs 5V.
-
@phaedrux Since I'll use the E2 of the expansion to wire my extruder motor, how to modify the config code to use the E2? I won't use the E0 and E1.
My config.g Driver code is below:
; Drives
M569 P0 S0 ; physical drive 0 goes backwards
M569 P1 S0 ; physical drive 1 goes backwards
M569 P2 S1 ; physical drive 2 goes forwards
M584 X0 Y1 Z2 ; set drive mapping
M350 X16 Y16 Z16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z400.00 ; set steps per mm
M566 X900.00 Y900.00 Z60.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z180.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z20.00 ; set accelerations (mm/s^2)
M906 X800 Y800 Z800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout -
@zfeng said in Extruder motor doesn't move:
Since I'll use the E2 of the expansion to wire my extruder motor, how to modify the config code to use the E2?
I already answered that I think.
@phaedrux said in Extruder motor doesn't move:
If you're using E2 that equates to driver 5 on the duex.
So in your M584 command, For the extruder drives you would list all the extruder that will be connected to the main Duet drivers and then add 5 for the expansion header.
M584 X0 Y1 Z2:3 E4:5just as an example.Have you seen this yet? https://duet3d.dozuki.com/Wiki/Using_external_stepper_motor_drivers
@zfeng said in Extruder motor doesn't move:
I'm not using motor drive output, I'm using the expansion portion of the board, which is 3.3V output. But my extruder motor needs 5V.
Do you mean your external driver needs 5v?
-
@phaedrux Yes my external driver needs 5V, will this breakout board work for my case?
https://duet3d.dozuki.com/Wiki/Duet_Expansion_Breakout_Board -
Can you link to your external driver?