New X Y motors stall problems
-
Hi , i changed my X Y motors to E3D with 0.9degree and now my homing absolutly not working . its crash and crashing than stop with error Homing Failed .
config.g :
; Configuration file for Duet WiFi (firmware version 3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.2.3 on Thu Jul 15 2021 19:20:56 GMT+0200 (Central European Summer Time); General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"Prusa i3" ; set printer name; Network
M552 S1 ; enable network
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet; Drives
M569 P0 S0 ; physical drive 0 goes forwards X
M569 P1 S1 ; physical drive 1 goes forwards Y
M569 P2 S0 ; physical drive 2 goes forwards Z
M569 P3 S1 ; physical drive 3 goes forwards E
M584 X0 Y1 Z2 E3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X200 Y200 Z397.48 E394.00 ; set steps per mm
M566 X900.00 Y900.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min)
M201 X2000.00 Y2000.00 Z100.00 E10000.00 ; set accelerations (mm/s^2)
M906 X800 Y800 Z650 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout; Axis Limits
M208 X-2.4 Y-6 Z0 S1 ; set axis minima
M208 X250 Y210 Z240 S0 ; set axis maxima; Endstops
M574 X1 S3 ; configure sensorless endstop for low end on X
M574 Y1 S3 ; configure sensorless endstop for low end on Y
M574 Z1 S2 ; configure Z-probe endstop for low end on Z; Z-Probe
M558 P1 C"zprobe.in" H5 F300 T6000 ; set Z probe type to unmodulated and the dive height + speeds
M308 S2 P"e1_temp" A"Pinda V2" Y"thermistor" T10000 B3950 ; pinda v2
G31 P500 X45 Y20 Z-0.15 ; set Z probe trigger value, offset and trigger height
M557 X30:230 Y0:186 S50 H5 ; define mesh grid; Heaters
M308 S0 P"bedtemp" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin bedtemp
M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0
M307 H0 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M308 S1 P"e0temp" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin e0temp
M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S280 ; set temperature limit for heater 1 to 280C; Fans
M950 F0 C"fan0" Q100 ; create fan 0 on pin fan0 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off
M950 F1 C"fan1" Q100 ; create fan 1 on pin fan1 and set its frequency
M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on; Tools
M563 P0 D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C; Custom settings are not defined
; Miscellaneous
M501 ; load saved parameters from non-volatile memory
M915 X Y S15 R0 ; zmena sensityvity na motoroch X a Y
T0 ; Nastavenie na Hrot 0
G29 S1 ; Nacitanie kompenzacie heatbeduhomeall.g :
; homeall.g
; called to home all axes
;
; generated by RepRapFirmware Configuration Tool v3.2.3 on Sun Jun 27 2021 18:14:24 GMT+0200 (Central European Summer Time)
M400 ; wait for current moves to finish
M915 X Y S30 R0 ; zmena sensityvity na motoroch X a Y
M913 X40 Y40 ; drop motor current to 70%
G91 ; relative positioning
G1 H2 Z5 F8000 ; lift Z relative to current position
G1 H1 X-260 Y-220 F8000 ; move quickly to X axis endstop and stop there
G90 ; absolute positioning
G1 X110 Y85 F9000 ; move to middle of bed plus probe offsets
G30 ; home z0homex.g
; homex.g
; called to home the X axis
;
; generated by RepRapFirmware Configuration Tool v3.2.3 on Sun Jun 27 2021 18:14:24 GMT+0200 (Central European Summer Time)
;M400 ; dokoncenie vsetkych pohybov
;M915 X S10 R0 ; zmena sensityvity na motoroch X a Y
;M913 X70 ; drop motor current
;M400 ; dokoncenie vsetkych pohybov
;G91 ; relative positioning
;G1 H2 Z5 F12000 ; lift Z relative to current position
;G1 H1 X-260 F5000 ; move quickly to X axis endstop and stop there
;G90 ; absolute positioning
;M400 ; dokoncenie vsetkych pohybov
;M913 X100 ; return current to 100%
;M400 ; dokoncenie vsetkych pohybovM400
M915 X Y S50 R0 ; zmena sensityvity na motoroch X a Y
M913 X70 Y70 ; drop motor current to 70%
M400 G91; relative positioning
G1 H2 Z10 F12000 ; lift Z relative to current position
G1 H1 X-250 F6000 ; move quickly to X axis endstop and stop there (first pass)
G90 ; absolute positioning
M400
M913 X100 Y100 ; return current to 100%
M400homey.g :
; homey.g
; called to home the Y axis
;
; generated by RepRapFirmware Configuration Tool v3.2.3 on Sun Jun 27 2021 18:14:24 GMT+0200 (Central European Summer Time)
M400 ; dokoncenie vsetkych pohybov
M915 Y S10 R0 ; zmena sensityvity na motoroch X a Y
M913 Y70 ; drop motor current to 70%
M400 G91 ; relative positioning
G1 H2 Z10 F12000 ; lift Z relative to current position
G1 H1 Y-220 F8000 ; move quickly to X axis endstop and stop there (first pass)
G90 ; absolute positioning
M400 ; dokoncenie vsetkych pohybov
M913 Y100 ; return current to 100%
M400 ; dokoncenie vsetkych pohybov -
You're using sensorless homing and just changed the motors, so you will need to retune the stall detection parameters.
https://duet3d.dozuki.com/Wiki/Stall_detection_and_sensorless_homing
-
@phaedrux
and how i tune it i changed :
; homey.g
; called to home the Y axis
;
; generated by RepRapFirmware Configuration Tool v3.2.3 on Sun Jun 27 2021 18:14:24 GMT+0200 (Central European Summer Time)
M400 ; dokoncenie vsetkych pohybov
M915 Y S3 R0 F0 ; zmena sensityvity na motoroch X a Y
M913 Y70 ; drop motor current to 70%
M400 G91 ; relative positioning
;G1 H2 Z5 F12000 ; lift Z relative to current position
G1 H1 Y-220 F8000 ; move quickly to X axis endstop and stop there (first pass)
G90 ; absolute positioning
M400 ; dokoncenie vsetkych pohybov
M913 Y100 ; return current to 100%
M400 ; dokoncenie vsetkych pohybovM915 Y Sn , i change n to everithing in low numbers it wont move and if i change it to higher number its crashing .
m569 p0
Drive 0 runs in reverse, active low enable, timing fast, mode spreadCycle, ccr 0x101b4, toff 4, tblank 2, hstart/hend/hdec 3/3/0, pos unknown -
You need to read that link carefully. Have you calculated what your M915 H value should be? You've doubled the number of steps per mm.
-
@phaedrux how i calculate it ? m915 H
Im added H400 to M915 changed S to 0 and now its homing X and Y fine . -
@savethepetko from the page @Phaedrux linked:
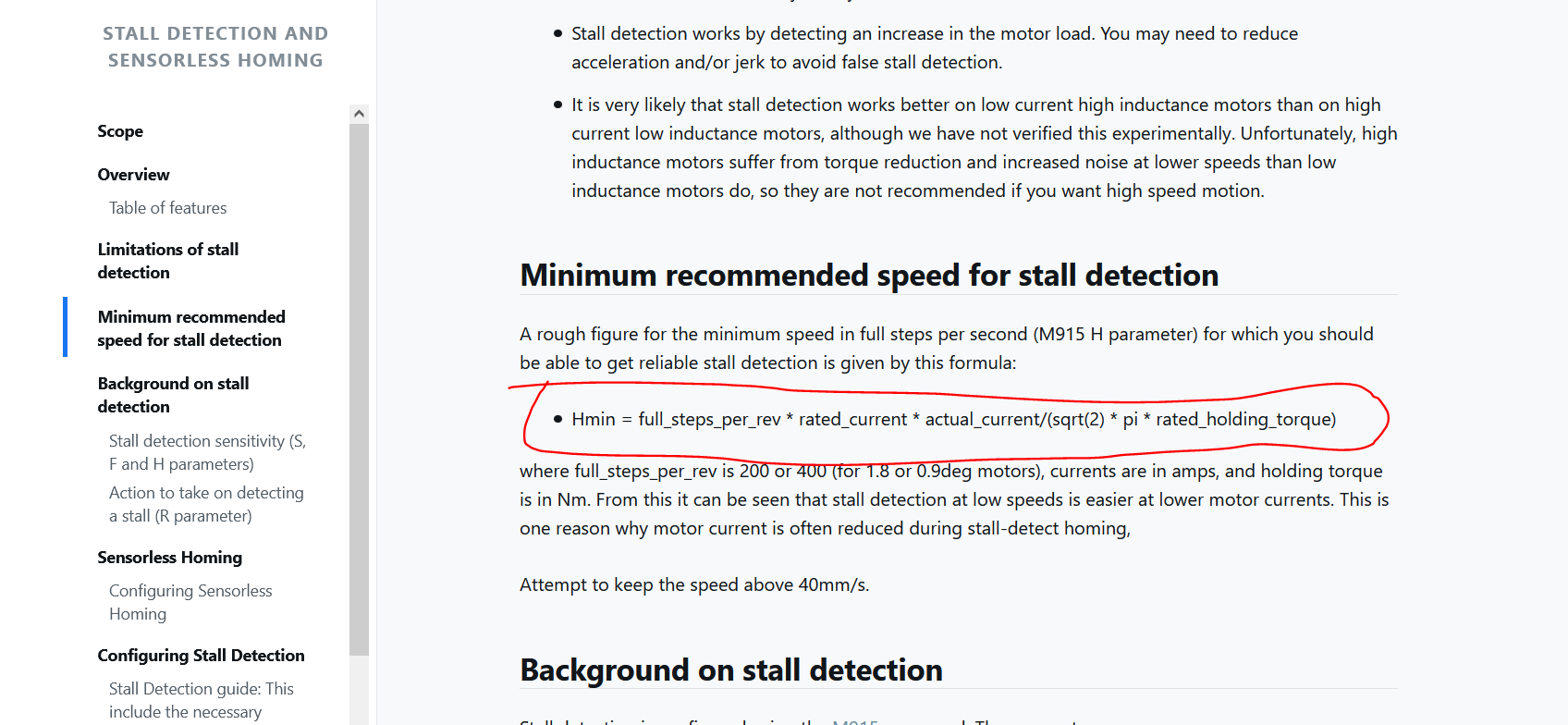
If it's working reliably for you, then all good, but might still be worth going through that guide properly as stall detection can change a bit as the motors heat up.