Large Format Dowell to Duet conversion
-
bed is super level, no movement just noises
-
Could it be I should send higher mA to the drives?
; Drives M569 P0.0 S1 ; physical drive 0.0 goes forwards M569 P0.1 S1 ; physical drive 0.1 goes forwards M569 P0.2 S1 ; physical drive 0.2 goes forwards M569 P0.3 S1 ; physical drive 0.3 goes forwards M569 P0.4 S1 ; physical drive 0.4 goes forwards M569 P0.5 S1 ; physical drive 0.5 goes forwards M569 P1.0 S1 ; physical drive 1.0 goes forwards M584 X0.0 Y0.1 Z0.2:0.4:0.5:0.3 E1.0 M350 X16 Y128 Z16 E16 I1 ; configure microstepping with interpolation M92 X80.00 Y1280.00 Z400.00 E420.00 ; set steps per mm M566 X900.00 Y900.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z20.00 E250.00 ; set accelerations (mm/s^2) M906 X2800 Y2800 Z1200 E1200 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout -
@charles-fraser it could be, where did those values come from originally? What Z motors do you have? also are you sure your Z steps/mm are right?
-
I just took standard NEMA17 1.6A power rating
The actual motor spec I can't find anywhere:


It's a screw with a lead of 5mm. It's defo not moving if I put +100 or +0.1 so is it really an issue with steps per mm ?
-
@charles-fraser said in Large Format Dowell to Duet conversion:
is it really an issue with steps per
assuming the gearing of those pulleys is 1.8:1 then 400 is correct I think. Other wise is probably not so far of that nothing moves when you only move 0.1mm in ZWithe the power turned off can you disconnect a Z motor and check the continuity of the two coils with a multi meter. Of the the 4 pins on the plug that you are plugging into the duet there should be two pairs of wires with low resistance.
-
Hi Tody I checked the pairs when wiring but I will double check now
-
@charles-fraser if the two pairs are pins 1-2 and pins 3-4 for the Z motors then the next step is to see if the motors turn individually, without the belts connected.
-
yup the pairs are pins 1+2 and 3+4
so I loosened the belt and stuck a sticker atop the motor so I can see it spinning and it does spin now the tension is off the belt.
-
@t3p3tony it just sounds like the one z motor is trying to move though
-
-
Okay +50 takes it +10 closer to the nozzle, i.e the bed goes up. I'm pretty sure we want + to make the bed go father from the nozzle right? Anyway, I will times the steps per mm by 5
-
-
@charles-fraser said in Large Format Dowell to Duet conversion:
I'm pretty sure we want + to make the bed go father from the nozzle right?
yes Z+ should increase the gap between the nozzle and the Bed. this is controlled with the S parameter in M569:
M569 P0.2 S1 ; physical drive 0.2 goes forwards M569 P0.3 S1 ; physical drive 0.3 goes forwards M569 P0.4 S1 ; physical drive 0.4 goes forwards M569 P0.5 S1 ; physical drive 0.5 goes forwards assumming all the Z motors are turning the same way then this should reverse that direction.
M569 P0.2 S0 ; physical drive 0.2 goes forwards M569 P0.3 S0 ; physical drive 0.3 goes forwards M569 P0.4 S0 ; physical drive 0.4 goes forwards M569 P0.5 S0 ; physical drive 0.5 goes forwards -
@Charles-Fraser please do me a favour, after you have made those changes and tested them post your full config.g here again - Is getting harder to quickly find it higher up the thread.
-
They are all moving up and down in the same direction yes
Configuration file for Duet 3 (firmware version 3.3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.3.3 on Fri Oct 01 2021 16:59:54 GMT+0100 (British Summer Time) ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves ; Wait a moment for the CAN expansion boards to start G4 S2 ; Drives M569 P0.0 S1 ; physical drive 0.0 goes forwards M569 P0.1 S1 ; physical drive 0.1 goes forwards M569 P0.2 S0 ; physical drive 0.2 goes forwards M569 P0.3 S0 ; physical drive 0.3 goes forwards M569 P0.4 S0 ; physical drive 0.4 goes forwards M569 P0.5 S0 ; physical drive 0.5 goes forwards M569 P1.0 S1 ; physical drive 1.0 goes forwards M584 X0.0 Y0.1 Z0.2:0.4:0.5:0.3 E1.0 M350 X16 Y128 Z16 E16 I1 ; configure microstepping with interpolation M92 X80.00 Y1280.00 Z2000.00 E420.00 ; set steps per mm M566 X900.00 Y900.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z20.00 E250.00 ; set accelerations (mm/s^2) M906 X2800 Y2800 Z1200 E1200 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X1200 Y2000 Z1600 S0 ; set axis maxima ; Endstops M574 X1 S1 P"io1.in" ; configure active-high endstop for low end on X via pin io1.in M574 Y1 S1 P"io2.in" ; configure active-high endstop for low end on Y via pin io2.in M574 Z1 S1 P"io0.in" ; configure Z-probe endstop for low end on Z ; Z-Probe M558 P9 C"^1.io1.in" H100 F120 T6000 ; set Z probe type to switch and the dive height + speeds G31 P500 X0 Y0 Z2.5 ; set Z probe trigger value, offset and trigger height M556 S50 X0 Y0 Z0 ; set orthogonal axis compensation parameters M557 X15:215 Y15:195 S20 ; define mesh grid ; Heaters M308 S0 P"1.temp0" Y"PT1000" M950 H0 C"1.out0" T0 M307 H0 B1 R0.138 C790.6 D13.87 S1.00 V24.0 ; enable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S80 ; set temperature limit for heater 0 to 80C M308 S1 P"1.temp1" Y"PT1000" ; configure sensor 1 as thermistor on pin temp0 M950 H1 C"1.out1" T1 ; create nozzle heater output on out1 and map it to sensor 1 M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit M143 H1 S300 ; set temperature limit for heater 1 to 300C ; Fans M950 F0 C"out8" Q0 ; create fan 0 on pin out8 and set its frequency M106 P0 S0 H T45 ; set fan 0 value. Thermostatic control is turned on M950 F1 C"out9" Q500 ; create fan 1 on pin out9 and set its frequency M106 P1 S1 H-1 ; set fan 1 value. Thermostatic control is turned off ; Tools M563 P0 S"lily" D0 H1 F0:1 ; define tool 0 G10 P0 X100 Y100 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C ; Custom settings are not defined -
I am trying to work out how to calculate the steps per mm if 2000 s/mm is giving me 52mm translation when I send 50. I can't seem to work out how to work it out embarrassingly
-
M92 X80.00 Y1280.00 Z1926.78 E420.00 ; set steps per mmokay this seems to be near enough
If I divide 100,000 steps by 52mm I get
1926.78 s/mm ifWhen I use value z1926.00 I get the following on a 50mm command

If I divide 51.9 mm by 100,000 steps I get 1926.78
That translates to
They are both .1 of a mm out. Is that okay if I am printing big things. No not really it needs to be less.
So I go between those two z1926.39
-
@t3p3tony iwhen I hit home all the z axis goes the wrong way
In fact, when I hit any of the home buttons, all it does is send the z axis the wrong way
-
@charles-fraser for Z when you jog it using DWC by a few mm does it move in the expected direction?
For the steps/mm this is really not something you measure for XYZ it something to calculate.
So
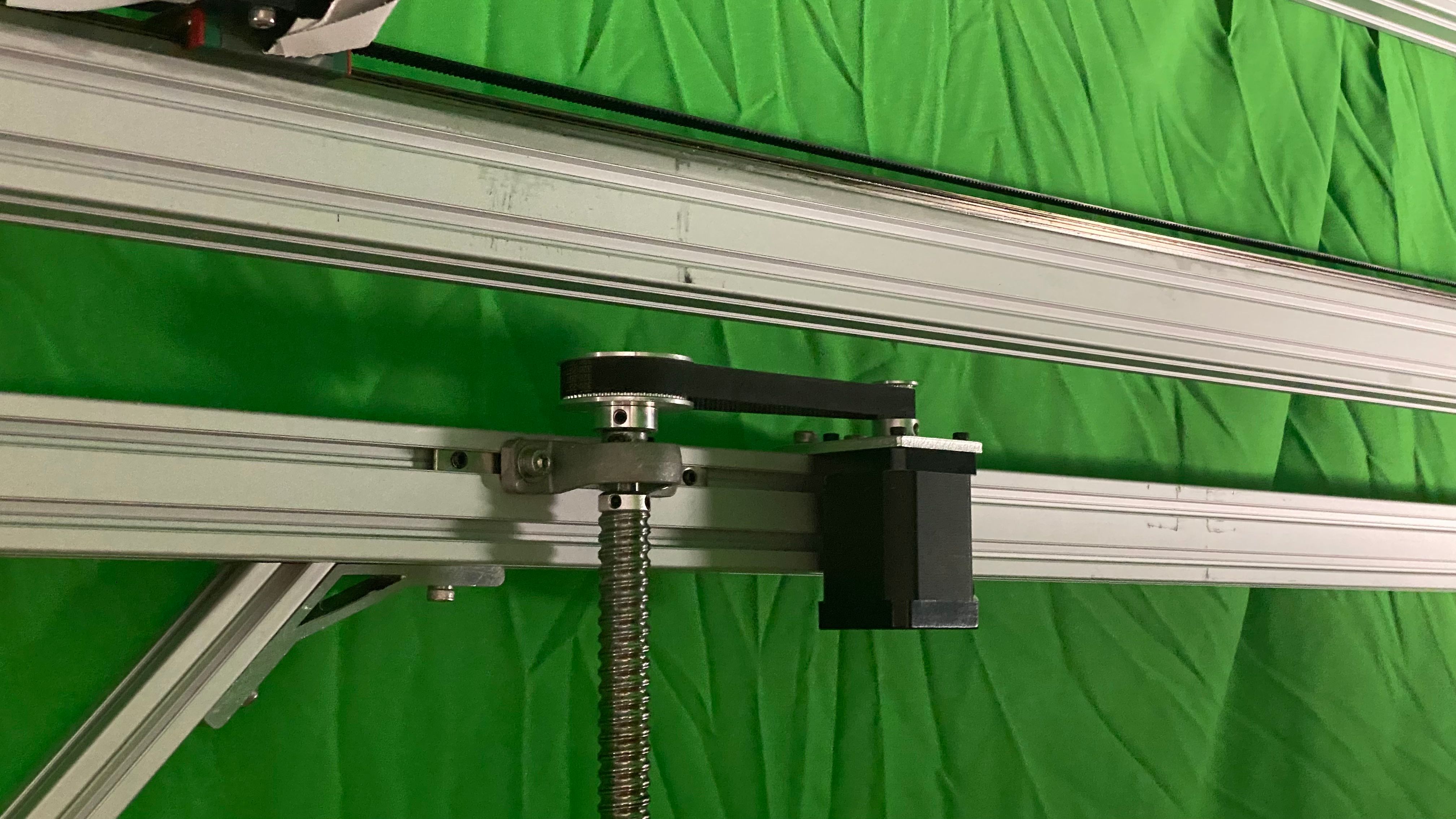
lead = 5mm
motor microsteps/rev = 3200 (with 16 microstepping and 1.8 degree motors it would be 3200)
the unknown to me is the ratio between the pully teeth on the motor and the larger pully on the Z rods. how many teeth are on each?Once you know that we work out the steps/mm for Z.
For the homing files, the first command is raise Z by 100mm (you can read the comments in the homing files).
So looking at home X.
; homex.g ; called to home the X axis ; ; generated by RepRapFirmware Configuration Tool v3.3.3 on Fri Oct 01 2021 16:59:55 GMT+0100 (British Summer Time) G91 ; relative positioning G1 H2 Z100 F6000 ; lift Z relative to current position G1 H1 X-1205 F1800 ; move quickly to X axis endstop and stop there (first pass) G1 H2 X5 F6000 ; go back a few mm G1 H1 X-1205 F360 ; move slowly to X axis endstop once more (second pass) G1 H2 Z-100 F6000 ; lower Z again G90 ; absolute positioning if you don't need to increase Z gap by 100 mm before homing then you can modify that line to a more appropriate amount. (but be sure to change the value on line 10 to match!)
Then the file moves X in a negative direction (which is correct assuming the end stop is at X minimum)
once its triggered it backs off and then tests again slower
then it decreases the Z gap (again this should match the amount in line 6).
Similar with the Home Y
Home all just puts it together into a fewer steps and then homes Z however as it stands that home all wont work correctly as its setup for a Z probe.
You mentioned you added a Z switch, where is it located (Z min or Z max?)
-
Thanks Tony, I think I worked out the steps for Z
The Z switch is triggered when the bed comes too close to the nozzle and pushes up against a switch. I’m not sure if that is min or Max?
")
