Ethernet with SBC (RPI) on Octopus Pro F429 board
-
@selva_tvi Have you considered just using a Duet3D board that can connect via Ethernet directly? That would be a much simpler solution (and given the current availability issues of rPi devices may well be more cost effective).
If you still want to go the rPi route then it would help if you could explain what you mean by "We tried but it was connecting with Wifi only", do you mean that you could only connect to the rPi by WiFi or that you were still connecting to the Octopus board by WiFi.
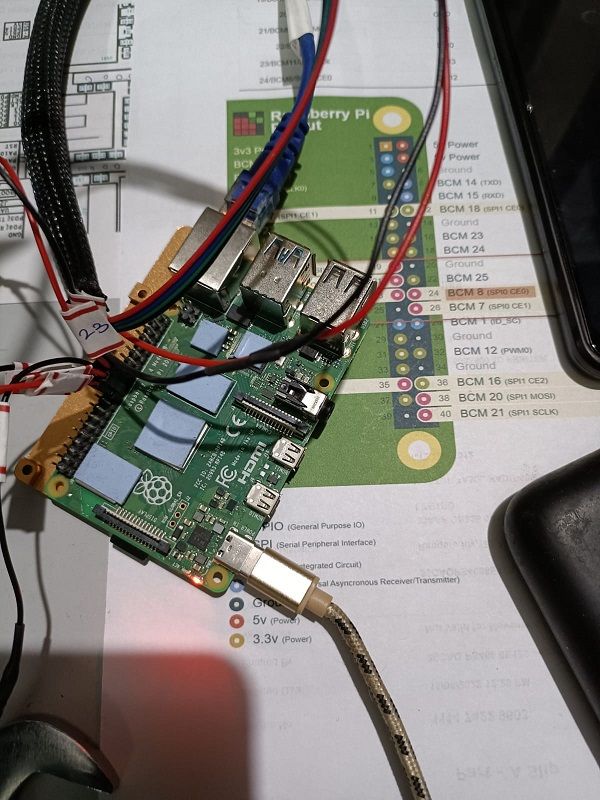
It would probably help if you posted a photo showing how you have the rPi and Octopus connected along with the output from running M122 and M122 P200 (you may need to connect to the Octopus board by USB to run these commands if your rPi is not connecting to the Octopus).
-
@gloomyandy My team member mistakenly told me that "We tried but it was connecting with Wifi only". Apologies for that.
-
Is it possible to use Ethernet with RPI in the Octopus Pro board. Any article is there? Or has anyone else tried that?
-
Octopus Pro is having CAN Bus option. With that shall we connect with Ethernet?
The client needs Ethernet at any cost. So, we are stuck now. Kindly support.
-
-
@selva_tvi If they are happy "with any cost", then just get a Duet board (with built in ethernet) and run that. By far the easiest solution.
-
@gloomyandy Thank you. But now changing to DUET boards will take a lot of time.
We feel that if we can use the RPI Ethernet function, that will be better.
-
@selva_tvi ethernet works when using an SBC
-
@jay_s_uk Great. Can you pls share any link or advice on how to do it?
-
@selva_tvi plug it in? it should be automatic.
At the end of the day its a down to the OS that runs on the SBC. If you're using a pi then its how raspberry pi OS behaves -
@jay_s_uk Thank you. Will try today.
-
@selva_tvi It sounds like you have very little experience of using Linux on a rPi, I'm really not sure that is a good basis for remotely supporting a customer with that setup. You will also need to put together a custom wiring loom to connect the Octopus board to the rPi (have you built that yet)? As the guy that wrote the code to get RRF working on STM32 systems I'm a big fan of them, but really in this case I think using Duet3D hardware will be a better solution for you and your customer. But at the end of the day it is your decision, good luck!
-
@gloomyandy I am mainly working on the Mechanical hardware side. My Electronics engineer is on leave. He is having good experience in using RPI.
Previously we have used Octopi on Robin Nano boards successfully. And it will be a straightforward connection.
We are having another Octopus pro board + RPI. We will be testing it here, then only we will give the instructions to the customer.
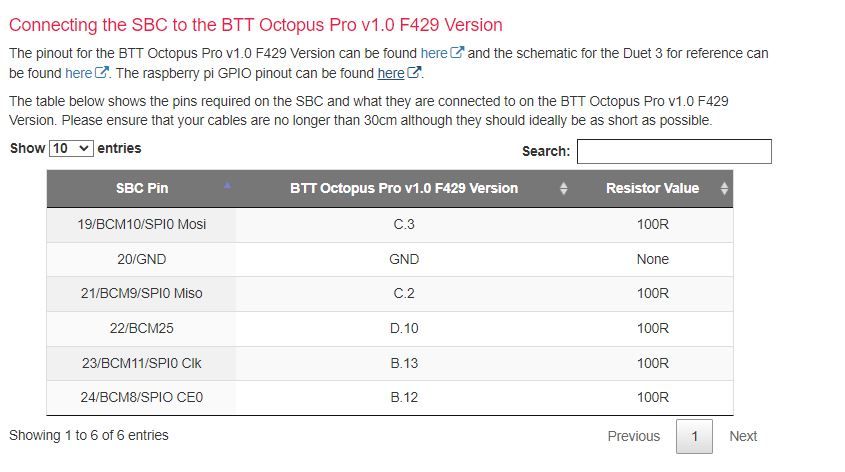
I hope you are taking about the above connection. Sure, we are reading that article completely. Any support we will connect with you guys in this forum.
Thanks
-
@selva_tvi yep, those connections are correct.
Whats not clear about them? -
@jay_s_uk @gloomyandy Hi, I have tried connecting Octopus pro with RPI.
Octopus Pro side:
- Already ESP8266 was connected. Removed that.
- Updated the firmware to 'firmware-stm32f4-sbc-3.3.0_11.bin'. Renaming to firmware.bin. Updated successfully.
- I used the existing folders - code, macros, www as it is.
- Uploaded the new sys files (through the configurator with SBC)
- Connected with Pronterface. It was connecting. Movements are happening. But while homing, it showed 'homex.g not found.
RPI Side: (RPI 4 Model B)
-
Got a new sd card of 32GB
-
Flashed Duet Pi Lite through Balena Etcher
-
Created wpa_supplicant.conf in the root folder of boot drive, added the following line: (Used the country as India)
country=IN
update_config=1
ctrl_interface=/var/run/wpa_supplicantnetwork={
ssid="SSID_OF_NETWORK"
psk="PASSWORD_OF_NETWORK"
} -
Kept the SD card in RPI. (Didn't do any extra steps)
-
RPI powered through Power bank (5V, 2.1A)
-
Gave the Jumper connections between RPI and Octopus Pro
-
Except GND all were connected through 100ohm Resistor.
-
Switched on both the printer and RPI
-
After 1 minute, RPI showed in Network. Checked with Fing app

-
When Trying to connect to the network by using duet3d.local/ or the given IP address, it is not connecting.
Following error is coming.
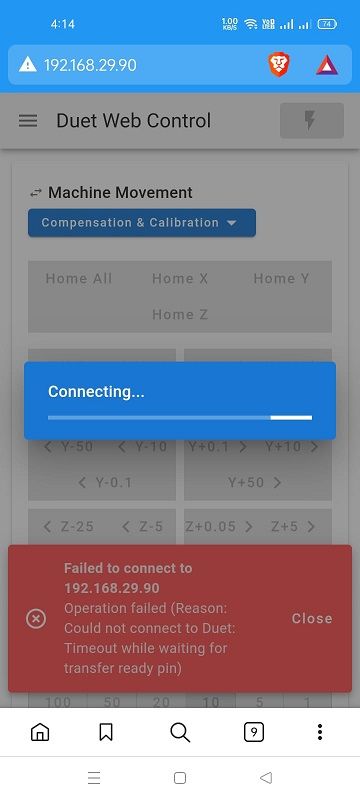
Pls let me know if anything is wrong
-
@selva_tvi that shows you your wiring is wrong so revisit that.
please keep the cables nice and short (under 100mm)
and if you downloaded the latest duetpi image, use 3.4 on the octopus not 3.3 -
@jay_s_uk Thanks. I updated 'firmware-stm32f4-wifi-3.4.0_1.bin'.
There is confusion with the configuration.
Below are the lines are taken from the below website:
https://teamgloomy.github.io/btt_octopus_pro_1.0_f429_connected_sbc.html//Config for BTT Octopus Pro v1.0 F429 Version
board = biqoctopuspro_1.0
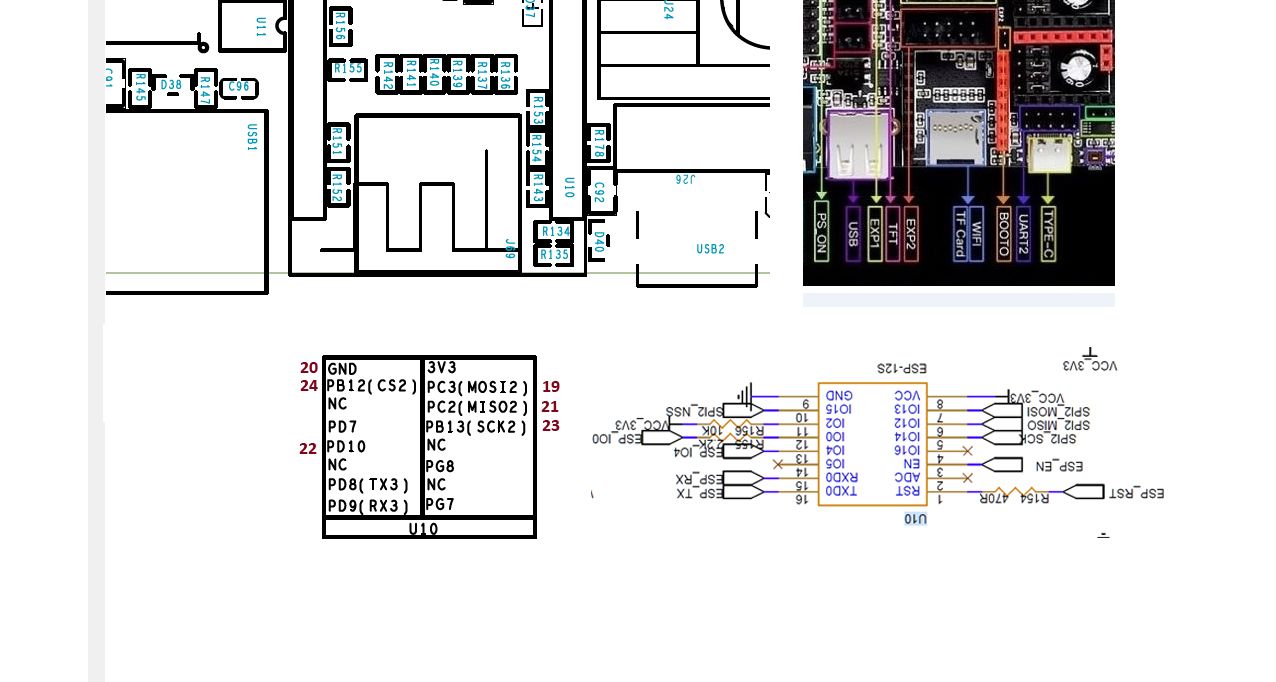
sbc.TfrReadyPin = D.10heat.tempSensePins = { F.3, F.4, F.5, F.6, F.7 }
leds.diagnostic = A.13In the above, Tfr ready pin is given as D.10
But, when i used the configurator for SBC, it is giving the below lines
//SBC Settings
sbc.TfrReadyPin = G.7;
heat.tempSensePins = {bedtemp,e0temp,e1temp}; //Max of 3 entries- Which one is correct? D.10 or G.7
- Also pls check the heat.tempsensepins.
- Also, should I copy all the sys files from Octopus Pro SD to RPI SD?
My main error is 'Timeout while waiting for Transfer ready pin'.
-
@selva_tvi said in Ethernet with SBC (RPI) on Octopus Pro F429 board:
I updated 'firmware-stm32f4-wifi-3.4.0_1.bin'.
you need the SBC build not the WiFi build
Use D.10. Looks like I have an issue with the configurator that I need to fix so I will investigate that.
Don't worry about updating the config files yet, just get the connection going first.
The only files you should have on the SD card on the octopus is the board.txt file in the sys folder -
@jay_s_uk Great. Thanks
 . It worked
. It worked
http://duet3.local/ is working.
Also, I used the IP address and connected. It connected. I copied the sys files to the Octopus Pro board and now it is fully working.
Now, I need only the Ethernet. (As per the client requirement). I hope this maynot be problem. Still the question.
- Should I disable the Wifi settings in ' wpa_supplicant.conf file' or delete the file itself? (I didn't find this file in the RPI folder ' wpa_supplicant.conf'
-
@selva_tvi i believe ethernet has priority over wifi so you shouldn't have to do anything
-
@jay_s_uk Thanks connections is proper. Later we updated the sys files through DWC itself.
Now axis movements are giving issues.
X and Y is moving. But Z is not at all moving.
We are using BTT TMC2209 - 08nos in the STEP mode only.
In the board.txt, initially we gave as 'stepper.numSmartDrivers = 0'.
Then later changed to 'stepper.numSmartDrivers = 8'.
With this X and Y are moving. Z is not moving.
Also, the commands are taken very slowly by the board. After giving movement, it takes some time to move.
-
@selva_tvi post an output of M122
it might be quicker for you to come join us on discord for realtime support https://discord.gg/uS97Qs7 -
@jay_s_uk Sure. I have messaged you in Discord. Pls check