motor phase A/B may be disconnected reported by driver(s) 0123
-
Hello. When I try to home for the first time x and y axis, I get '' motor phase A/B disconnected reported by <all> drivers''. I controlled crimps, connections (phases are connected in the right mode, I used the duet's wiki instructions), resistance of motors with a multimeter and everything seems good. I have a duet 2 wifi with 3.3 firmware version, a cartesian printer and using 42byghm810 stepper motor. What could I do to solve the error?
this is a part pf my config.g:
; Drives
M569 P0 S1 ; physical drive 0 goes forwards
M569 P1 S1 ; physical drive 1 goes forwards
M569 P2 S0 ; physical drive 2 goes backwards
M569 P3 S1 ; physical drive 3 goes forwards
M584 X0 Y1 Z2 E3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X100.00 Y100.00 Z400.00 E100.00 ; set steps per mm
M566 X600.00 Y600.00 Z18.00 E300.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z180.00 E6000.00 ; set maximum speeds (mm/min)
M201 X1500.00 Y1500.00 Z100.00 E10000.00 ; set accelerations (mm/s^2)
M906 X1440 Y1440 Z1440 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout; Axis Limits
M208 X-33 Y-10 Z0 S1 ; set axis minima
M208 X220 Y220 Z240 S0 ; set axis maxima; Endstops
M574 X1 S1 P"xstop" ; configure switch-type (e.g. microswitch) endstop for low end on X via pin xstop
M574 Y1 S1 P"ystop" ; configure switch-type (e.g. microswitch) endstop for low end on Y via pin ystop
M574 Z1 S2 ; configure Z-probe endstop for low end on Z; Z-Probe
M950 S0 C"exp.heater3" ; create servo pin 0 for BLTouch
M558 P9 C"^zprobe.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X-35 Y5 Z2.5 ; set Z probe trigger value, offset and trigger height
M557 X20:200 Y20:200 S40 ; define mesh grid -
Have the drivers ever worked in this setup? Or is this a new build?
How exactly did you verify the motor phases?
Do you still get the phases errors if you disconnect all motors and try to home?
-
@phaedrux hello, thank you very much for your reply!
This is a new build, but the board was used before in another printer with different motors, it's not new.
To verify the phases I used a multimeter, if I get resistance between 2 wires, that belong to the same phase, no continuity = different phase.
If I disconnect all the motors and I try to home x and y I get the same error
-
@phaedrux I'm using a 12V 33A psu, specifications of the motor: https://www.gotronic.fr/pj-451.pdf
-
@nicolo17 said in motor phase A/B may be disconnected reported by driver(s) 0123:
the board was used before in another printer with different motors
Can you test with one of those previously working motors?
-
@phaedrux I tested now the old motors and I got the same error...
-
You might check this thread:
https://forum.duet3d.com/topic/28498/phase-a-and-b-may-be-disconnectedI believe you're trying to make the motors go too fast for your supply voltage.
https://wildbot.me/wildbot
Gcode Definitions for VSCode extension: https://github.com/hayseedbyte/rrf-gcode-definitions -
@hayseed_byte @Phaedrux Thank you! I tried to change speed and acceleration (now I put very low values) in config.g under "drivers" sectionandand I'm still getting the same error

This is my config.g section:
; Drives
M569 P0 S1 ; physical drive 0 goes forwards
M569 P1 S1 ; physical drive 1 goes forwards
M569 P2 S0 ; physical drive 2 goes backwards
M569 P3 S1 ; physical drive 3 goes forwards
M584 X0 Y1 Z2 E3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X100.00 Y100.00 Z400.00 E100.00 ; set steps per mm
M566 X100.00 Y100.00 Z5.00 E100.00 ; set maximum instantaneous speed changes (mm/min)
M203 X400.00 Y400.00 Z50.00 E400.00 ; set maximum speeds (mm/min)
M201 X900.00 Y900.00 Z70.00 E2500.00 ; set accelerations (mm/s^2)
M906 X1500 Y1500 Z1500 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30I also share my M122 response, if it can help:
M122
=== Diagnostics ===
RepRapFirmware for Duet 2 WiFi/Ethernet version 3.4.1 (2022-06-01 21:05:28) running on Duet WiFi 1.02 or later
Board ID: 08DGM-95BNL-MGPSN-6J9F6-3S46N-TJWMW
Used output buffers: 3 of 26 (26 max)
=== RTOS ===
Static ram: 23860
Dynamic ram: 75168 of which 12 recycled
Never used RAM 12968, free system stack 130 words
Tasks: NETWORK(ready,6.4%,219) HEAT(notifyWait,0.0%,329) Move(notifyWait,0.0%,312) MAIN(running,92.6%,440) IDLE(ready,1.0%,30), total 100.0%
Owned mutexes: WiFi(NETWORK)
=== Platform ===
Last reset 00:06:54 ago, cause: software
Last software reset at 2022-09-18 10:58, reason: User, GCodes spinning, available RAM 12968, slot 0
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0041f000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a
Error status: 0x04
Aux0 errors 0,0,0
Step timer max interval 0
MCU temperature: min 26.1, current 26.7, max 27.6
Supply voltage: min 12.3, current 12.4, max 12.5, under voltage events: 0, over voltage events: 0, power good: yes
Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0
Events: 3278 queued, 3278 completed
Driver 0: standstill, SG min n/a
Driver 1: standstill, SG min n/a
Driver 2: standstill, SG min n/a
Driver 3: standstill, SG min n/a
Driver 4: over temperature warning, over temperature shutdown, phase A short to ground, phase B short to ground, standstill, SG min n/a
Driver 5:
Driver 6:
Driver 7:
Driver 8:
Driver 9:
Driver 10:
Driver 11:
Date/time: 2022-09-18 11:05:18
Cache data hit count 4294967295
Slowest loop: 9.98ms; fastest: 0.19ms
I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0
=== Storage ===
Free file entries: 10
SD card 0 detected, interface speed: 20.0MBytes/sec
SD card longest read time 2.0ms, write time 0.0ms, max retries 0
=== Move ===
DMs created 83, segments created 3, maxWait 43059ms, bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves 10, completed 10, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== AuxDDARing ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters 0 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0
Heater 1 is on, I-accum = 0.0
=== GCodes ===
Segments left: 0
Movement lock held by null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
Daemon is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty
=== Network ===
Slowest loop: 202.25ms; fastest: 0.00ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions
HTTP sessions: 1 of 8- WiFi -
Network state is active
WiFi module is connected to access point
Failed messages: pending 0, notready 0, noresp 0
WiFi firmware version 1.26
WiFi MAC address 2c:3a:e8:0b:09:1f
WiFi Vcc 3.43, reset reason Turned on by main processor
WiFi flash size 4194304, free heap 23752
WiFi IP address 192.168.1.116
WiFi signal strength -59dBm, mode 802.11n, reconnections 0, sleep mode modem
Clock register 00002002
Socket states: 0 0 0 0 0 0 0 0
- WiFi -
-
@nicolo17 I have ''Driver 4: over temperature warning, over temperature shutdown, phase A short to ground, phase B short to ground, standstill, SG min n/a'' because I removed this driver from the board because was burned during an old project
-
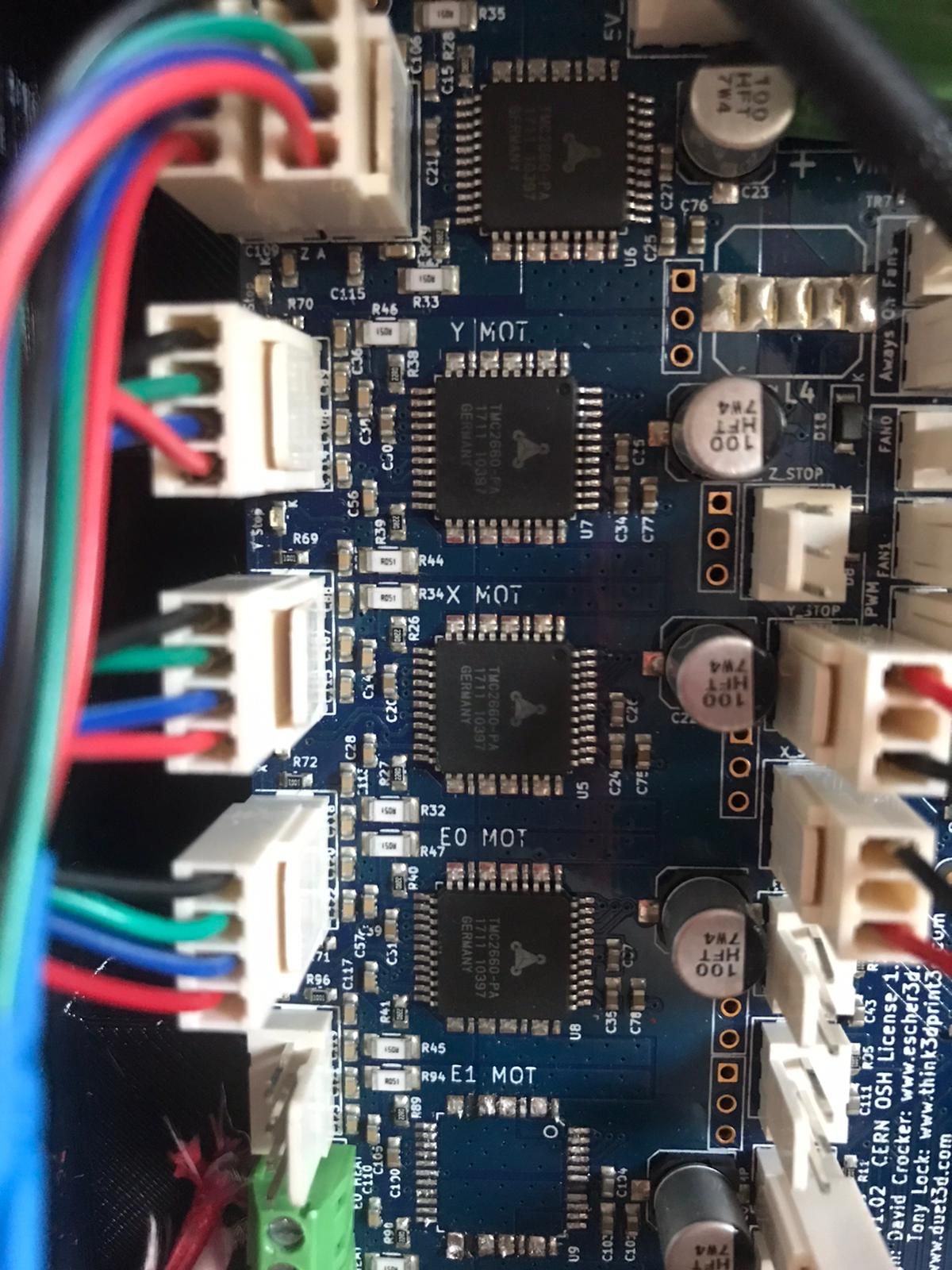
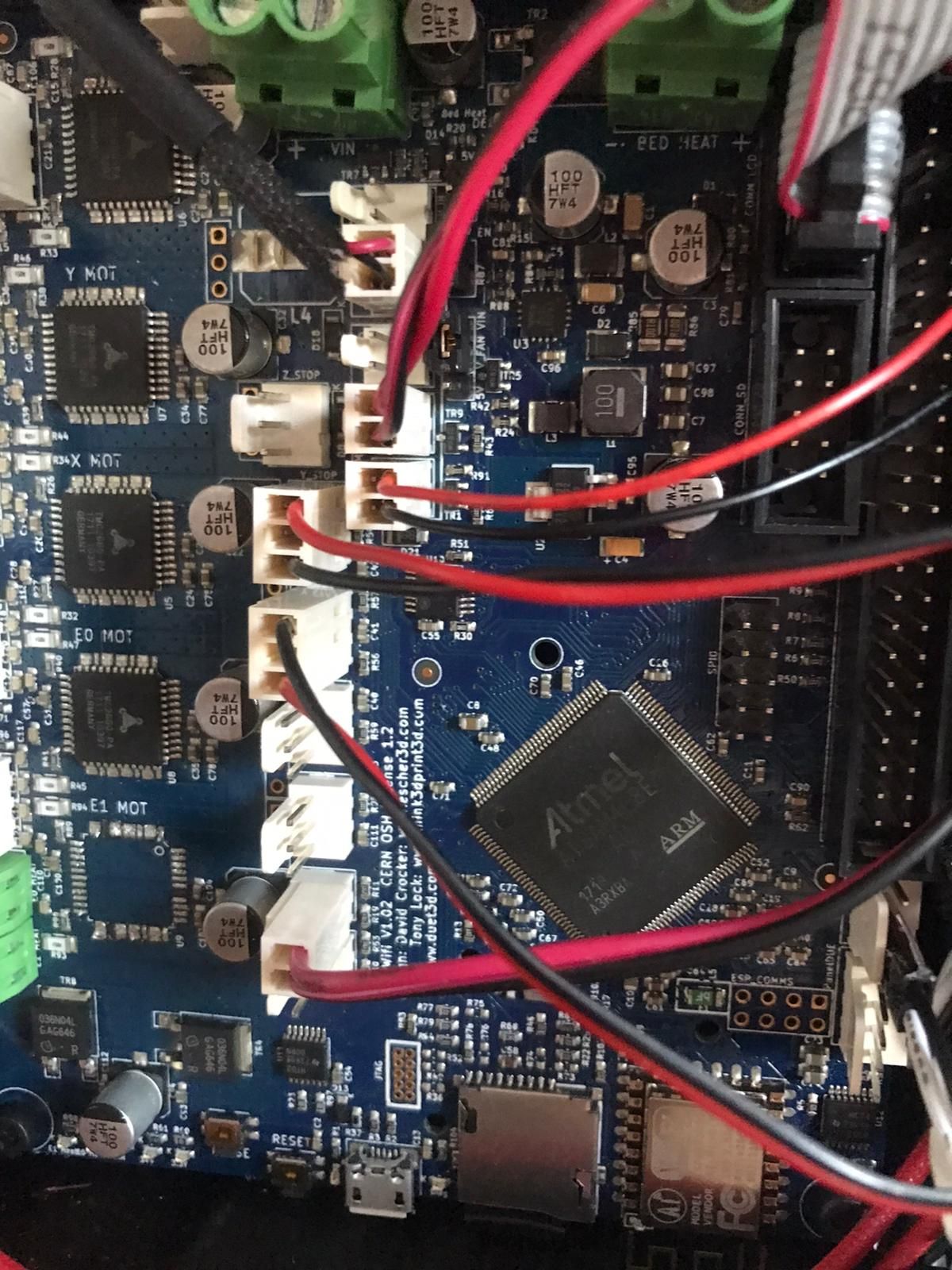
Can you grab some close up well lit photos of the board, especially in the driver chip area?
-
-
@nicolo17 said in motor phase A/B may be disconnected reported by driver(s) 0123:
@nicolo17 I have ''Driver 4: over temperature warning, over temperature shutdown, phase A short to ground, phase B short to ground, standstill, SG min n/a'' because I removed this driver from the board because was burned during an old project
You can try adding
M569 P4 R-1to your config to disable that driver entirely. That may get rid of that error at least.As for the other driver errors I'm not sure. You've already tested with previously working drivers and the error persists.
From a software side the only two things I can suggest at this point is to try updating the firmware to 3.4.2 just to refresh everything.
https://github.com/Duet3D/RepRapFirmware/releases/download/3.4.2/Duet2and3Firmware-3.4.2.zip
Next you can try connecting a single motor only and a fresh config set from the config tool.
Otherwise has there been any event that you can think of which may have caused some damage to the board?
-
@phaedrux Today a tried to use another duet 2 wifi and now the printer works... I think the other board is broken... I'll try to use it with a duex so I can connect motors directly to it, I hope it will work. Thank you very much for your help!