How to record input shaping accelerometer data?
-
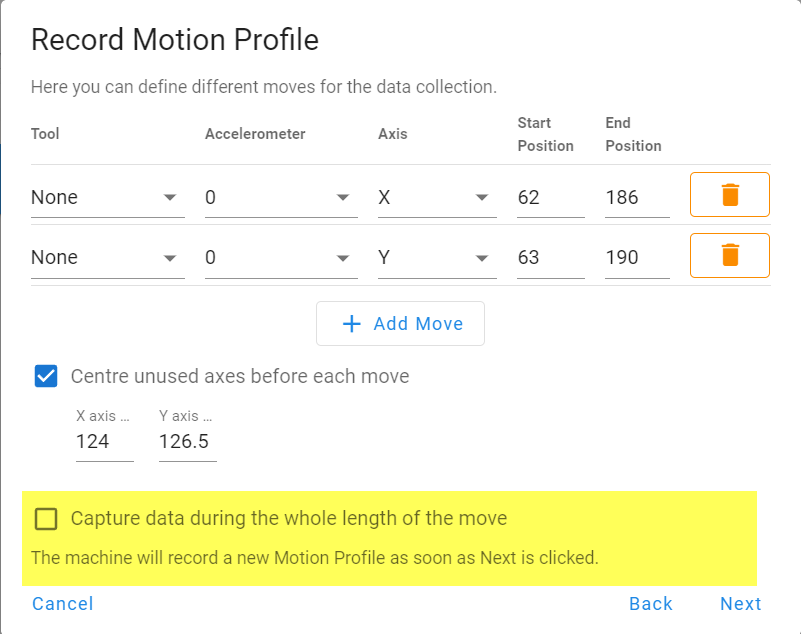
What is the recommended state for the 'Capture data during the whole length of the move' checkbox? Disabling seems to eliminate the low frequencies of the move itself.
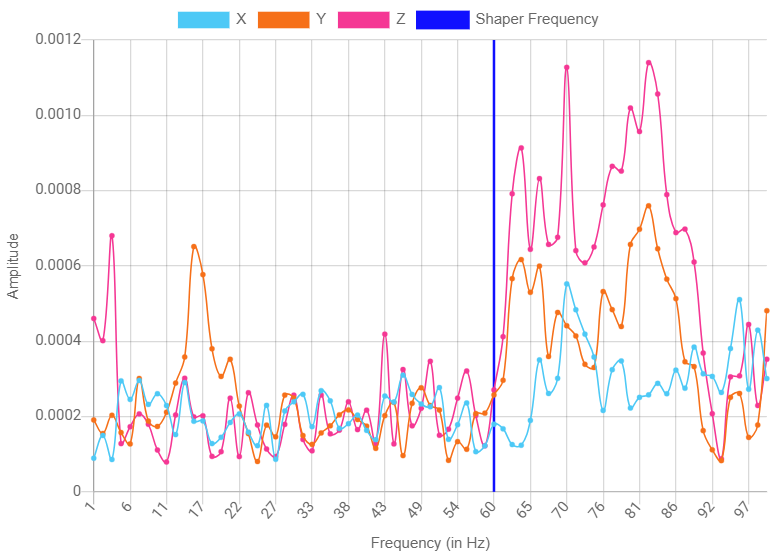
With checkbox disabled:
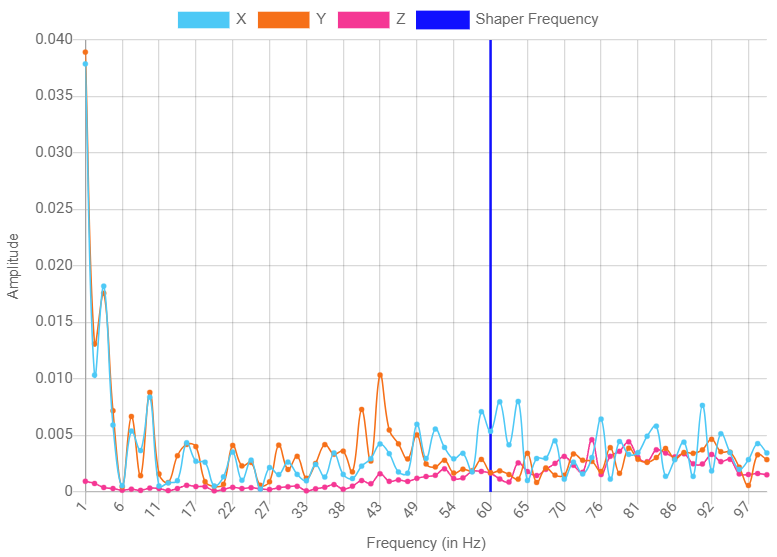
With checkbox enabled:
-
@zapta Uncheck it. The large startup spikes you get sometimes when it is checked can dwarf the pulses you really need to see.
-
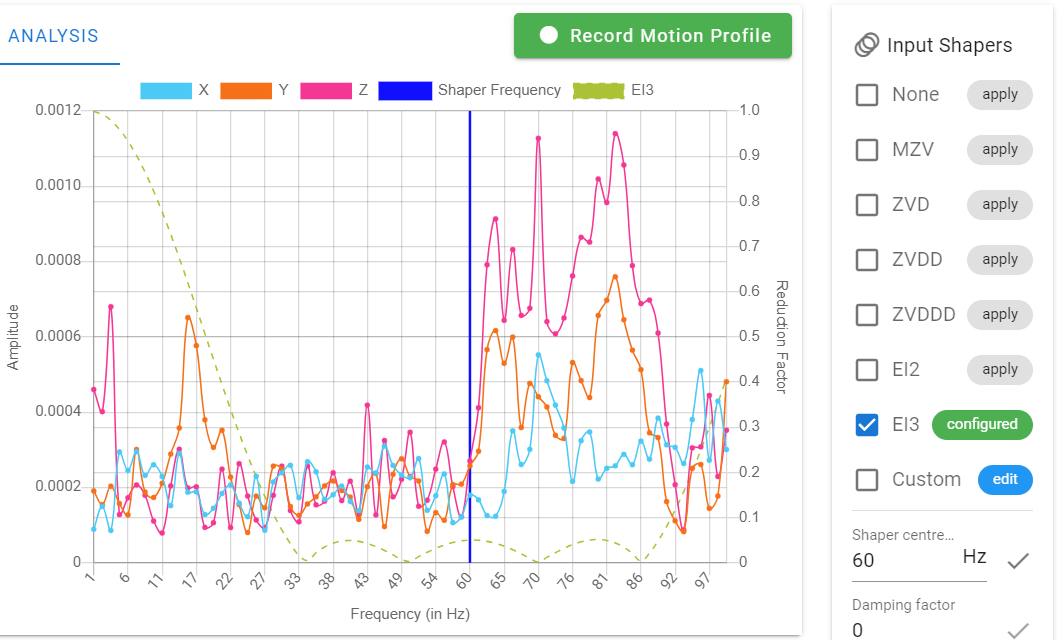
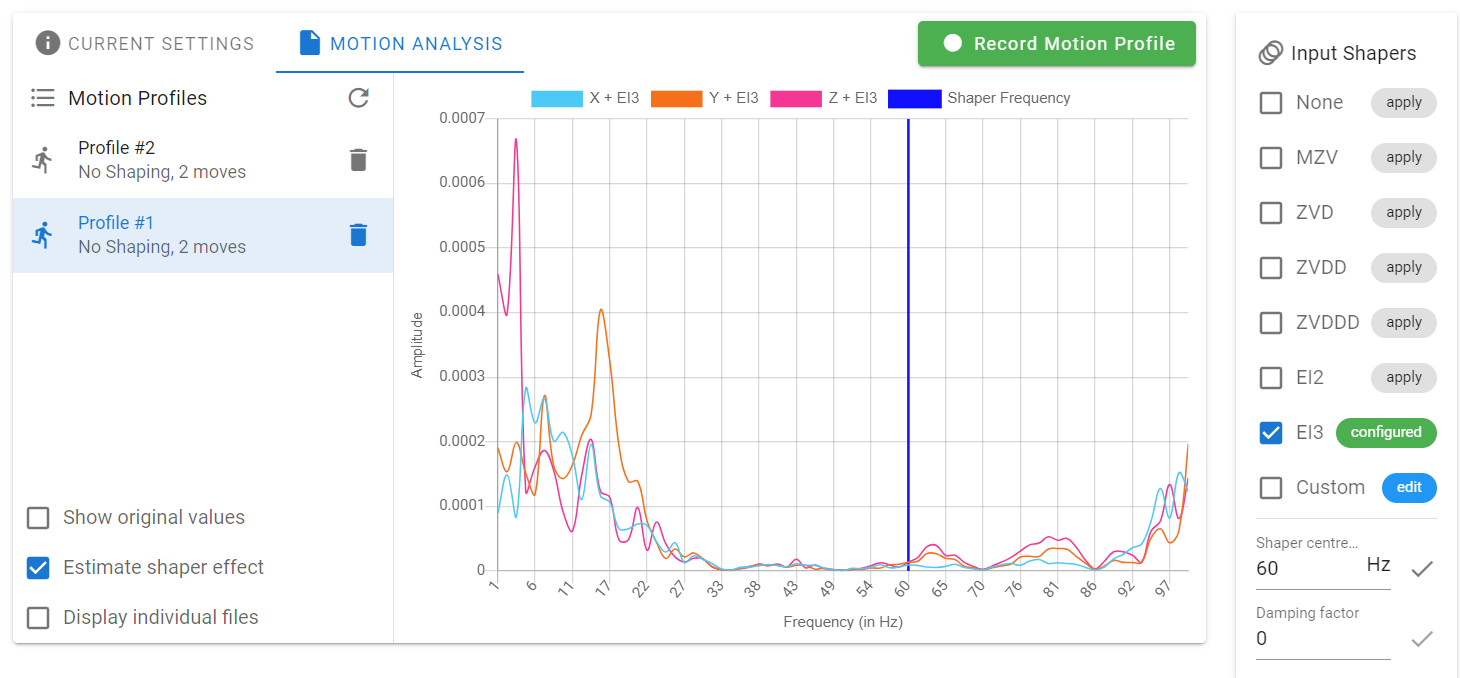
Thanks @tas, it was not obvious from the documentation. This is the signal I got with the checkbox off and the input shaping I chose (RI3, 60Hz, 0.0 Damping). Is it reasonable?
-
@zapta the frequency components above 60Hz may well be noise from belts and fans, in which case they are not very relevant to IS. OTOH the peak around 17Hz in the Y data suggests to me that the machine may be a bed slinger with a heavy bed and/or a loose Y belt.
What type of machine is it?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
Hi @dc42, this is a Voron 2.4 Core XY, and indeed the Y mass is heaver than the X since it includes the X extrusion and rail.
A few questions if it's ok...
-
As a rule of thumb, should I ignore frequencies above some value?
-
When I record, should I check the 'record all with movement' check box?
-
Any suggestion for center frequency and algorithm to use in my case?
-
I see significant level at Z @ 3Hz even though the tests where in X and Y. Is it normal? Should I disable bed mesh compensation? (the gantry is held by 4 Z belts if it's matter).
BTW, I don't have much ringing on my machine as is so may be difficult to improve on it.
Edit: have you considered automatic detection of the three axis from the movements? Or at least verification of the Ixx from the movement signals. It may simplify the configuration.
-
-
@zapta yes you should disable mesh bed compensation when collecting accelerometer data.
Automatic checking of the accelerometer axes is a good idea.