4 axis palletized robot arm (robot kinematics) for 3D printing
-
@YuriConfessor your email address has not been confirmed yet. I have resent the confirmation email.
Ian
-
@JoergS5 There is a second link under your picture called "alt text"
It shows the same type of arm, but holds a ping-pong bat. -
@o_lampe ok, thanks for your comment, it's the same robot type. So I'll implement it.
-
It was a problem with the e-mail confirmation, now I'am able to reply.
-
@JoergS5 When can we start testing?
-
@YuriConfessor said in 4 axis palletized robot arm (robot kinematics) for 3D printing:
When can we start testing?
when I have reimplemented the code into the firmware and posted it. I will make a time plan at the weekend and tell you.
I already programmed the logic, but after changing code for CoreXY, I have to integrate it into the new design. It will not take long, maybe a week after the weekend before I have testing code for you.
-
@JoergS5 Ok, I'll wait for it then. If there's something I can help with please let me know
-
@JoergS5 I'm not familiar with screw theory, but I've been reading about it in the Duet3D documentation and searching for relevant papers. I have a strong understanding of geometric algebra, as I am completing my physics degree.
-
@YuriConfessor said in 4 axis palletized robot arm (robot kinematics) for 3D printing:
I have a strong understanding of geometric algebra, as I am completing my physics degree.
That's interesting. I implement the kinematics with screw theory, but for more complex problems like 6 arm industrial robots I use geometric algebra (eg calculating intersections of two circles of two robot arms). Some ideas like quaternion based slerp for a velocity constant rotation of AC axes is part of geometric algebra, so I want to base a segmentation calculation on this theory. This is however not part of the kinematics, but of the core RRF.
For geometric algebra I use the conformal geometric algebra, originated from Hestenes.
Let me implement the easy part 4 axis palletized first and recheck the CoreXY AC. I'm happy to discuss with you about geometric algebra after this. @xyzdims told me about geometric algebra a year ago, he may be interested in participating.
-
@YuriConfessor to add a thought about geometric algebra:
RRF and microcontrollers in general have very limited memory. I failed to implement calculating the geometric product with hash tables, because they need too much memory (4 KB eg is too much already). I calculate most of the geometric product, and make manual calculations into using only the used values of the sparse 32-value-Conformal-Geometry. If you can help and have ideas in this area, this would be helpful. But in other areas as well, of course.
-
@JoergS5 Is my Armdroid (1980s cable-strung robot arm) a '4 axis palletized robot arm'? I think it is. It has six motors, the assignments are:
Motor 1 - base rotation
Motor 2 - shoulder
Motor 3 - forearm
Motor 4 - left wrist
Motor 5 - right wrist
Motor 6 - gripperWhen the wrist motors are run in the same direction, the wrist moves up and down, when run in opposite directions, the wrist rotates.
It looks like this:
If so, looking forward to your firmware update, and getting it moving in the New Year! Happy to do any testing. I have a 6HC or a Mini 5+ with Mini 2+ I can put in it.
Ian
-
@JoergS5 said in 4 axis palletized robot arm (robot kinematics) for 3D printing:
That's interesting. I implement the kinematics with screw theory, but for more complex problems like 6 arm industrial robots I use geometric algebra (eg calculating intersections of two circles of two robot arms). Some ideas like quaternion based slerp for a velocity constant rotation of AC axes is part of geometric algebra, so I want to base a segmentation calculation on this theory. This is however not part of the kinematics, but of the core RRF.
For geometric algebra I use the conformal geometric algebra, originated from Hestenes.I will try to deepen my knowledge of algebra so that it can be applied to robotics. I confess that I have only used it within the study of physics, so I am excited to be able to apply my learning in a more practical way. I have heard of Hestenes; during my undergraduate studies, I was recommended one of his books, "Clifford Algebra to Geometric Calculus".
-
@JoergS5 I think I can probably help with it, just need to understand what progress you've made so far and learn a little bit better about RRF microcontrollers
-
@droftarts the specific property of the 4 axis palletized robot is that there is a parallelogram structure in the middle which makes sure that the beginning reference line is the same like at the endpoint, i.e. through construction a constraint is added to asure a specific orientation (the endpoint always being horiziontal in this case).
The parallelogram construction helps for heavy weights also, my favorite is ABB IRB 8700. A "bit" too expensive for me.
I think your robot is different, however very interesting. When I understand what wrist means and which parts move/rotate, I can support to add a kinematics for it.
-
@JoergS5 thanks for the explanation. I can’t remember if this arm keeps the endpoint (ie the gripper) in the same orientation as the other joints move, but I think it does, at least within its normal range of movement. ‘Wrist’ is the joint the gripper sits on, and allows for orientation of the gripper separately from the forearm.
Excited to potentially have this arm under control for the first time in a couple of decades!
Ian
-
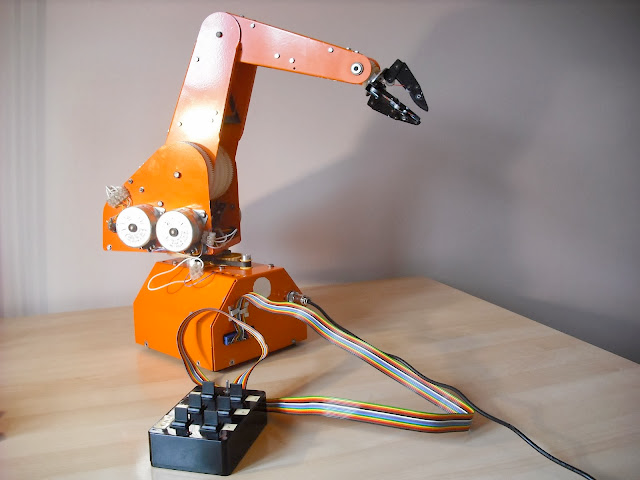
@droftarts I found a 4 axis palletizing robot from Sainsmart for 99$
With my CO2 lasercutter and some decent plywood or acrylic sheets, I think I could make a RRF version for steppers. (although those MG995 servos are hard to beat cost/power-wise)
@JoergS5 Your robot kinematics expect a step/dir interface, I guess?

-
@o_lampe that looks interesting. From a quick look at the pictures, the extra linkages are doing the same (probably a better) job as the cables in my arm.
Ian
-
@droftarts As JoergS5 already said: the linkages make sure that the toolhead is always horizontal. Your arm has some deluxe options which are not palletizing-compatible.
-
@o_lampe right I get it now. The tool head is kept horizontal (or vertical) and there’s no control over that. My arm has the extra controllable wrist joint, which makes it a five or six axis arm, I suppose. If I ignore that for now, I think I can still test the 4 axis palletised firmware.
Ian
-
@o_lampe said in 4 axis palletized robot arm (robot kinematics) for 3D printing:
robot kinematics expect a step/dir interface, I guess
the kinematics is integrated in RRF like the other kinematics. So the capabilites in respect to controlling interfaces are the same.
The Sainsmart has no parallelogram, but I analyzed it some time ago: the triangle on top has the same function, when thinking through the angles. Some of the commercial big robots use the same triangle construction (Kuka KR 700 eg).
Two parallelograms, conntected with a fixed triangle. Advantage: arms can be "bent down", disadvantage: more hinges, probably with play = less precision. For 3D printers, it may be better to construct it with a true parallelogram and the actuators higher placed.