[3.5.0 RC3] Printer is realy slow in X/Y suddenly
-
Hi Guys,
I have updated my Setup (with SBC) from RC1 to 3.5.0 RC3.
After starting a print, the machine first homes normally, grabs the tool and then starts to travel extremely slow.
In this state, I aborted the print and try to home again, but it now homes extremely slow also and never returns from this 'slow state'.
Only after a reset, the machine behaves normal until I start the next print.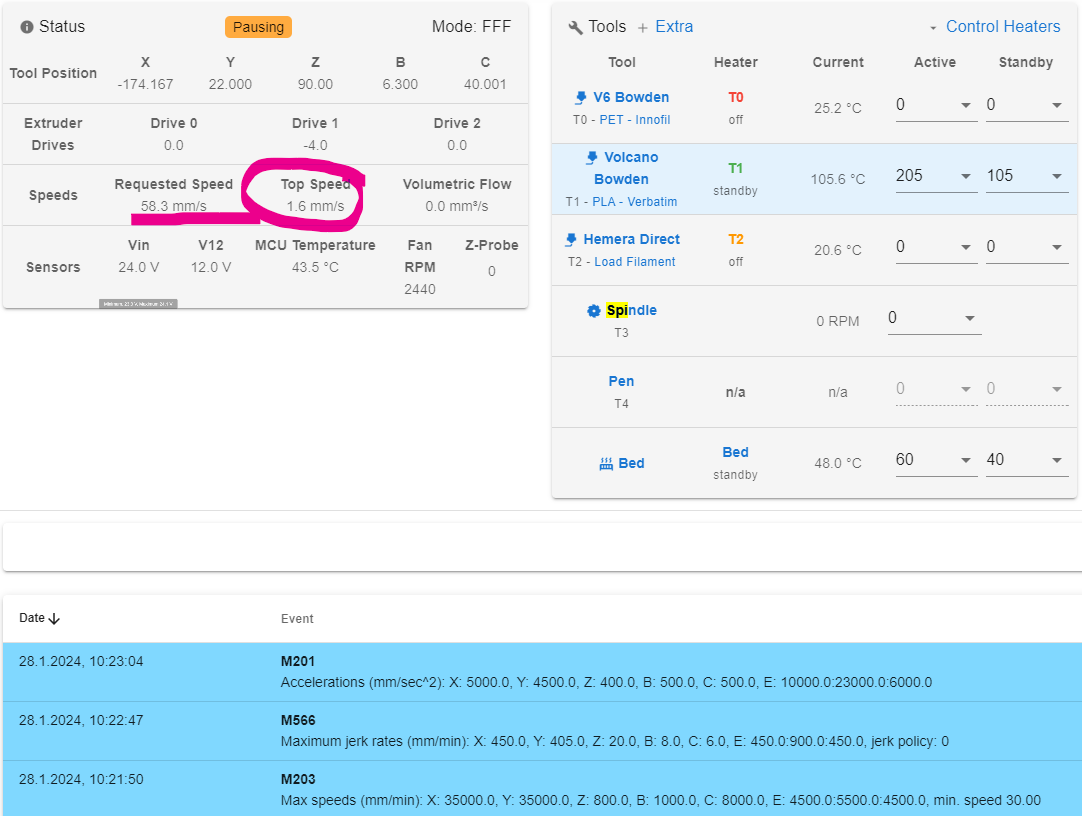
On the picture you can see the requested speed is much larger than the top speed of the current move (linear in X, ~100mm, so plenty of space to accelerate).
Does anybody have a hint for me as to where to start searching for the cause of this? What is it that can accommodate such a behavior?
Thanks!
-
Update: I reverted to 3.5.0-rc.2 via
M997 S2 V"3.5.0-rc.2"(thanks for this feature!!!) and now the issue is even more astonishing:
The coordinates of the tool are jumping really fast (a bit like it's simulating), but only the Z axis is moving sometimes and not quite as it should (X and Y are stationary)I will investigate a bit further and try to report on my findings...
-
Ok, so it seems that this strange behavior occurs when printing and even simulating any file.
Note the simulated time of this file:

I cannot wrap my head around what the simulation of a file can change in configuration that homing / moving is extremely slow afterward.
I reverted to 3.5.0-rc.1 via
M997 S2 V"3.5.0-rc.1"(that was my last used version) but now the issue is still present. The simulated time is now complitly off in the other direction:
Can someone try to simulate the following file on his machine with any 3.5.0-rc and report the simulated time / any change in behavior afterward?
I had to truncate a bit of the file in the middle, but the error is still present for me: bad_job.gcodeThanks to all.
-
@marvineer can you post a bit more details of your setup? It may help @chrishamm diagnose what’s gone wrong. M122 and other logs would help. M997 S2 is a new feature, and not extensively tested.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
It's a E3D ToolChanger with a 6HC as main board, a Toolbaord and a 3HC as extension boards.
The config is a little more complex, I published it on GitHub.
The main config file is stated here, but there are multiple macros involved:
; here we define everything connected to the main board ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"MultiPrint" ; set printer name ;M551 P"******" M669 K1 ; select CoreXY mode M80 C"!pson" ; invert the PS_ON output for Meanwell power supply ; Network ;M552 P0.0.0.0 S1 ; enable network and set IP address ;M553 P255.255.255.0 ; set netmask ;M554 P192.168.1.254 ; set gateway ;M586 P0 S1 ; enable HTTP ;M586 P1 S0 ; disable FTP ;M586 P2 S0 ; disable Telnet ; PanelDue 5.0i with custom logo M575 P1 S1 B115200 ; wait for expansion boards to start G4 S1 ; Define inputs and their trigger if necessary M950 J5 C"^io5.in" ; input 5 - ActiveToolDetect (Tool Detect Switch) M950 J6 C"^io7.in" ; input 6 - OpenDoorDetect M581 P6 T2 S1 R0 ; define rising edge trigger --> door opened (trigger2.g) M581 P6 T3 S0 R0 ; define falling edge trigger --> door closed (trigger3.g) M582 T2 ; check for trigger (necessary, we might start with door open) M950 J7 C"^io8.in" ; input 7 - E-Stop (trigger 0) M581 P7 T0 S1 R0 ; define rising edge trigger --> emergency stop (M112) (NOT-HALT) ; check if e-stop is triggerd at startup if sensors.gpIn[7].value == 1 M291 T0 P"pull e-stop and reset machine to continue" R"e-stop is active" M300 M582 T0 abort ; Lights M950 P0 C"1.out1" Q500 ; main M950 P1 C"1.out0" Q500 ; head if sensors.gpIn[6].value == 1 ; door is closed M98 P"/macros/Lights/set.g" D"main" B0.75 ; turn on main light else M98 P"/macros/Lights/set.g" D"main" B0.05 ; LED Strip M950 E0 U18 T1 C"0.led" ; drive LED strip all white at low power M150 R255 U255 B255 P10 S18 ; Drives D3: stealthChop2 V4000: switch from stealthChop to to spreadCycle mode at 0.1 mm/sec speed (quiet at standstill) M569 P0.2 S0 ; physical drive 0.2 goes backwards (X - Axis) M569 P0.1 S0 ; physical drive 0.1 goes backwards (Y - Axis) M569 P0.0 S1 ; physical drive 0.0 goes forwards (Z - Axis) M569 P0.3 S0 ; physical drive 0.3 goes backwards (C - COUPLER) M569 P1.0 S1 ; physical drive 1.0 goes forwards (B - BRUSH) M569 P0.4 S1 ; physical drive 0.4 goes forwards (E0 - V6) M569 P0.5 S1 ; physical drive 0.5 goes forwards (E1 - Volcano) M569 P121.0 S0 ; physical drive 121.0 goes forwards (E2 - HighTemp Direct) M584 X0.2 Y0.1 Z0.0 C0.3 B1.0 E0.4:0.5:121.0 ; set drive mapping M350 X16 Y16 Z16 B16 E16:16:16 I1 ; configure microstepping with interpolation M350 C16 I0 ; configure microstepping without interpolation M92 X100 Y100 Z1600 C91.022 B128 E400:400:400 ; set steps per mm M98 P"/macros/Speeds/set_speed.g" S"startup" ; set speeds, jerk and accel. for the beginning M566 Z20 C2 B8 E450:900:450 ; set maximum instantaneous speed changes (mm/min) M203 Z800 C8000 B1000 E4500:5500:4500 ; set maximum speeds (mm/min) M201 Z400 C500 B500 E10000:23000:6000 ; set accelerations (mm/s^2) M906 X1800 Y1800 Z1130 B500 I20 ; set motor currents (mA) and motor idle factor in per cent (X Y Z B) M906 C500 E1000:1000:1000 I10 ; set motor currents (mA) and motor idle extruder motors to 10% M84 S15 ; Set idle timeout ;spindle M950 R0 C"^vfd" Q900 L10000 ; Spindle 0 uses out9/vfd as RPM pin with 200 Hz PWM freq and has a max RPM of 10000 ; limits M98 P"/macros/Boundaries/ToolHead.g" ; set dynamic axis Limits M208 Z0:264.6 C-45:360 B0:23 ; set static axis limits (min:max) ; Endstops M574 X1 S1 P"^io3.in" ; configure active-high endstop for low end on X via pin ^io1.in M574 Y1 S1 P"^io4.in" ; configure active-high endstop for low end on Y via pin ^io2.in M574 Z2 S1 P"^io2.in" ; configure active-high endstop for high end on Z via pin ^io7.in M574 C0 ; No C endstop M574 B1 S1 P"^1.io3.in" ; configure active-high endstop for low end on B via pin ^io5.in ; Z-Probe M558 P8 C"io1.in" H2 F600:300 I0 A4 S0.025 T20000 ; set Z probe type to switch and the dive height + speeds G31 P200 X0 Y0 Z0 ; set Z probe trigger value, offset and trigger height M557 X-140:140 Y-90:90 S20:30 ; Define mesh grid ;Stall Detection M915 X Y S6 F1 R1 ; X / Y Axes ; Heaters M308 S0 P"temp0" Y"thermistor" A"Bed" T100000 B4138 ; configure sensor 0 as thermistor on pin temp0 ; BED ; correction val for port "temp0": H=-19; L=0 M950 H0 C"out0" T0 Q5 ; create bed heater output on out0 and map it to sensor 0 with a PWM freq of 5 Hz M307 H0 B0 R1.240 C413.8 D3.17 S1 ; disable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S200 ; set temperature limit for bed heater 0 to 200C M308 S1 P"temp1" Y"thermistor" A"T0" T100000 B4138 ; configure sensor 1 as thermistor on pin temp3 ; TOOL 0 ; correction val for port "temp3": H=-7; L=13 M950 H1 C"out1" T1 ; create nozzle heater output on out3 and map it to sensor 1 M307 H1 R2.320 K0.406:0.085 D5.66 E1.35 S1.00 B0 V24.0 ; disable bang-bang mode for heater and set PWM limit M143 H1 S285 ; set temperature limit for heater 1 to 285C M308 S2 P"temp2" Y"thermistor" A"T1" T100000 B4138 ; configure sensor 2 as thermistor on pin temp3 ; TOOL 1 ; correction val for port "1.temp0": H=-6; L=3 M950 H2 C"out2" T2 ; create nozzle heater output on 1.out1 and map it to sensor 2 M307 H2 R2.016 K0.366:0.030 D5.70 E1.35 S1.00 B0 V24.5 ; disable bang-bang mode for heater and set PWM limit M143 H2 S285 ; set temperature limit for heater 2 to 285C M308 S3 P"121.temp0" Y"thermistor" A"T2" T100000 B4138 ;configure sensor 3 as thermistor on pin 121.temp0 ; TOOL 2 ; correction val for port "121.temp0": H=-13; L=0 M950 H3 C"121.out0" T3 ; create nozzle heater output on 121.out0 and map it to sensor 3 M307 H3 R2.409 K0.350:0.180 D5.36 E1.35 S1.00 B0 V23.9 ; disable bang-bang mode for heater and set PWM limit M143 H3 S250 ; set temperature limit for heater 3 to 250C ; Fans M950 F0 C"out4" Q500 ; create fan 0 on pin out9 and set its frequency M106 P0 S0 H-1 L0.2 C"T0" ; set fan 0 value. Thermostatic control is turned off M950 F1 C"out7" Q500 ; create fan 1 on pin out8 and set its frequency M106 P1 S1 H1 T60 ; set fan 1 value. Thermostatic control is turned on M950 F2 C"out5" Q500 ; create fan 2 on pin 1.out6 and set its frequency M106 P2 S0 H-1 L0.2 C"T1" ; set fan 2 value. Thermostatic control is turned off M950 F3 C"out8" Q500 ; create fan 3 on pin 1.out7 and set its frequency M106 P3 S1 H2 T60 ; set fan 3 value. Thermostatic control is turned on M950 F4 C"121.out1" Q500 ; create fan 4 on pin 121.out1 and set its frequency M106 P4 S0 H-1 L0.4 C"T2" ; set fan 4 value. Thermostatic control is turned off M950 F5 C"121.out2" Q500 ; create fan 5 on pin 121.out2 and set its frequency M106 P5 S1 H3 T60 ; set fan 5 value. Thermostatic control is turned on M950 F6 C"!out6+out6.tach" Q500 ; create fan 6 on pin out4, this is a PWM fan so the output needs to be inverted, and using out4.tach as a tacho input M106 P6 S0 H-1 C"Filterbox" ; set fan 6 value. Thermostatic control is turned off M106 P6 S0 ; Input Shaping ;M593 P"zvdd" F42.2 ; cancel ringing at 42.2Hz ;(https://forum.e3d-online.com/threads/accelerometer-and-resonance-measurements-of-the-motion-system.3445/) ; Tools M563 P0 S"V6 Bowden" D0 H1 F0 ; define tool 0 G10 P0 X-8.02 Y38.97 Z-4.7 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C M572 D0 S0.2 ; pressure advance T0 M308 S8 Y"linear-analog" P"1.io0.in" A"T0FilamentScale" B-65 C3240 ; Filament Weight Scale for tool 0 M563 P1 S"Volcano Bowden" D1 H2 F2 ; define tool 1 G10 P1 X-7.92 Y38.96 Z-13.2 ; set tool 1 axis offsets G10 P1 R0 S0 ; set initial tool 1 active and standby temperatures to 0C M572 D1 S0.3 ; pressure advance T1 M308 S9 Y"linear-analog" P"1.io1.in" A"T1FilamentScale" B45 C4100 ; Filament Weight Scale for tool 1 M563 P2 S"Hemera Direct" D2 H3 F4 ; define tool 2 G10 P2 X21.05 Y43.75 Z-5.7 ; set tool 2 axis offsets G10 P2 R0 S0 ; set initial tool 2 active and standby temperatures to 0C M591 D2 P3 C"121.io1.in" ; Configure filament sensing for tool 2 M572 D2 S0.05 ; pressure advance T2 M308 S10 Y"linear-analog" P"1.io2.in" A"T2FilamentScale" B-233 C8500 ; Filament Weight Scale for tool 2 M563 P3 S"Spindle" R0 ; define tool 3 G10 P3 X0 Y52.50 Z-78.7 ; set tool 3 axis offsets M563 P4 S"Pen" ; define tool 4 G10 P4 X0 Y50.0 Z-21.0 ; set tool 4 axis offsets ;some notes about PA: ;the large bowden tool should need a value of 2.0 or 2.1, but the system gets ridiculously slow without cranking up E jerk ; PowerFail Script (use M916 to resume the print from where it stopped) M911 S23.6 R23.8 P"M913 X0 Y0 G91 M83 G1 E-5 F1000" ; set voltage thresholds and actions to run on power loss ;MCU Temp Calibration M912 P0 S8 ;room temp: 20°C (reportet MCU temp right after startup: 12°C) M308 S5 Y"mcu-temp" A"6HC MCU" ;show MCU-temp of Mainboard (MB6HC) in DWC (Tools -> Extra) Graph M308 S6 Y"mcu-temp" P"1.dummy" A"3HC MCU" ;show MCU-temp of CAN expansion board 1 (3HC) in DWC (Tools -> Extra) Graph M308 S7 Y"mcu-temp" P"121.dummy" A"1LC MCU" ;show MCU-temp of CAN expansion board 121 (1LC) in DWC (Tools -> Extra) Graph ;DHT Sensor (temp and humidity) M308 S11 P"io6.out" Y"dht22" A"Chamber" ; define DHT22 temperature sensor M308 S12 P"S11.1" Y"dhthumidity" A"Rel. Humidity[%]" ; attach DHT22 humidity sensor to secondary output of temperature sensorThis has worked for nearly half a year now without a change, however it is quite hard to debug with such a weird behavior as described above. And of course I may have overridden a file without notice...
-
@droftarts
Here is a M122 of every board in case someone spots something. In fact, the EXP3HC seems to have crashed:M122 === Diagnostics === RepRapFirmware for Duet 3 MB6HC version 3.5.0-rc.1 (2023-08-31 16:19:24) running on Duet 3 MB6HC v1.0 or earlier (SBC mode) Board ID: 08DJM-956L2-G43S4-6JTD4-3SS6J-TA7GH Used output buffers: 1 of 40 (31 max) === RTOS === Static ram: 154852 Dynamic ram: 91712 of which 788 recycled Never used RAM 95784, free system stack 204 words Tasks: SBC(2,rWait:,1.0%,396) HEAT(3,nWait,0.0%,325) Move(4,nWait,0.0%,340) CanReceiv(6,nWait,0.0%,794) CanSender(5,nWait,0.0%,335) CanClock(7,delaying,0.0%,351) TMC(4,nWait,8.4%,59) MAIN(2,running,88.7%,137) IDLE(0,ready,1.8%,30), total 100.0% Owned mutexes: HTTP(MAIN) === Platform === Last reset 00:01:07 ago, cause: software Last software reset at 2024-01-28 13:31, reason: User, Gcodes spinning, available RAM 95712, slot 1 Software reset code 0x6003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0043c000 BFAR 0x00000000 SP 0x00000000 Task SBC Freestk 0 n/a Error status: 0x00 Aux0 errors 0,0,0 MCU temperature: min 34.0, current 42.2, max 43.0 Supply voltage: min 24.0, current 24.0, max 24.1, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.0, current 12.0, max 12.1, under voltage events: 0 Heap OK, handles allocated/used 99/21, heap memory allocated/used/recyclable 2048/580/144, gc cycles 0 Events: 0 queued, 0 completed Driver 0: standstill, SG min n/a, mspos 8, reads 43225, writes 14 timeouts 0 Driver 1: standstill, SG min n/a, mspos 8, reads 43225, writes 15 timeouts 0 Driver 2: standstill, SG min n/a, mspos 136, reads 43225, writes 15 timeouts 0 Driver 3: standstill, SG min n/a, mspos 8, reads 43226, writes 14 timeouts 0 Driver 4: standstill, SG min n/a, mspos 8, reads 43226, writes 14 timeouts 0 Driver 5: standstill, SG min n/a, mspos 8, reads 43226, writes 14 timeouts 0 Date/time: 2024-01-28 13:32:32 Slowest loop: 25.83ms; fastest: 0.08ms === Storage === Free file entries: 20 SD card 0 not detected, interface speed: 37.5MBytes/sec SD card longest read time 0.0ms, write time 0.0ms, max retries 0 === Move === DMs created 125, segments created 0, maxWait 0ms, bed compensation in use: none, height map offset 0.000, ebfmin 0.00, ebfmax 0.00 no step interrupt scheduled Moves shaped first try 0, on retry 0, too short 0, wrong shape 0, maybepossible 0 === DDARing 0 === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === DDARing 1 === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0 === GCodes === Movement locks held by null, null HTTP* is doing "M122" in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is assembling a command in state(s) 0 Trigger* is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 File2 is idle in state(s) 0 Queue2 is idle in state(s) 0 Q0 segments left 0, axes/extruders owned 0x0000000 Code queue 0 is empty Q1 segments left 0, axes/extruders owned 0x0000000 Code queue 1 is empty === Filament sensors === Extruder 2: no data received === CAN === Messages queued 615, received 2117, lost 0, boc 0 Longest wait 2ms for reply type 6053, peak Tx sync delay 5, free buffers 50 (min 49), ts 338/337/0 Tx timeouts 0,0,0,0,0,0 === SBC interface === Transfer state: 5, failed transfers: 0, checksum errors: 0 RX/TX seq numbers: 4088/4088 SPI underruns 0, overruns 0 State: 5, disconnects: 0, timeouts: 0 total, 0 by SBC, IAP RAM available 0x25a98 Buffer RX/TX: 0/0-0, open files: 0 === Duet Control Server === Duet Control Server version 3.5.0-rc.1 (2023-09-01 07:16:31) Code buffer space: 4096 Configured SPI speed: 8000000Hz, TfrRdy pin glitches: 0 Full transfers per second: 62.80, max time between full transfers: 70.9ms, max pin wait times: 43.0ms/14.1ms Codes per second: 2.27 Maximum length of RX/TX data transfers: 4632/808M122 B1 Diagnostics for board 1: Duet EXP3HC rev 1.01 or earlier firmware version 3.5.0-rc.1 (2023-08-31 16:27:14) Bootloader ID: SAME5x bootloader version 2.4 (2021-12-10) All averaging filters OK Never used RAM 156728, free system stack 202 words Tasks: Move(3,nWait,0.0%,182) HEAT(2,nWait,0.0%,120) CanAsync(5,nWait,0.0%,67) CanRecv(3,nWait,0.0%,79) CanClock(5,nWait,0.0%,70) TMC(2,nWait,5.8%,103) MAIN(1,running,92.8%,417) IDLE(0,ready,0.0%,39) AIN(2,delaying,1.4%,263), total 100.0% Last reset 00:03:29 ago, cause: software Last software reset at 2106-02-07 06:28, reason: HardFault zeroDiv unaligned invPC invState undefInstr bfarValid stkErr unstkErr imprec precise ibus, available RAM 158128, slot 0 Software reset code 0x0060 HFSR 0xffffffff CFSR 0xffffffff ICSR 0xffffffff BFAR 0xffffffff SP 0xffffffff Task ���� Freestk 4294967295 ok Stack: 00000000 2000161c 20000fa8 00000000 00000000 00010f87 00016f30 81000000 00000000 2000161c 20003bd8 2000306c 00000000 0002943f 00000000 20003068 00000000 00000000 20003068 20001444 20001450 200013f2 200013fa 000200dd 20003bc0 00000032 20003bc0 Driver 0: pos 0, 128.0 steps/mm, standstill, SG min n/a, mspos 8, reads 30145, writes 16 timeouts 0, steps req 0 done 0 Driver 1: pos 0, 80.0 steps/mm, standstill, SG min n/a, mspos 8, reads 30150, writes 11 timeouts 0, steps req 0 done 0 Driver 2: pos 0, 80.0 steps/mm, standstill, SG min n/a, mspos 8, reads 30151, writes 11 timeouts 0, steps req 0 done 0 Moves scheduled 0, completed 0, in progress 0, hiccups 0, segs 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0, ebfmin 0.00 max 0.00 Peak sync jitter 4/14, peak Rx sync delay 182, resyncs 0/0, no timer interrupt scheduled VIN voltage: min 24.5, current 24.5, max 24.5 V12 voltage: min 12.2, current 12.2, max 12.2 MCU temperature: min 35.4C, current 36.1C, max 36.1C Last sensors broadcast 0x00000740 found 4 16 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 2536, send timeouts 0, received 2695, lost 0, free buffers 38, min 38, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0M122 B121 Diagnostics for board 121: Duet TOOL1LC rev 1.0 or earlier firmware version 3.5.0-rc.1 (2023-08-31 16:30:01) Bootloader ID: SAMC21 bootloader version 2.4 (2021-12-10) All averaging filters OK Never used RAM 4200, free system stack 114 words Tasks: Move(3,nWait,0.0%,135) HEAT(2,nWait,0.2%,117) CanAsync(5,nWait,0.0%,54) CanRecv(3,nWait,0.0%,79) CanClock(5,nWait,0.0%,66) TMC(2,delaying,3.0%,57) MAIN(1,running,91.7%,324) IDLE(0,ready,0.0%,41) AIN(2,delaying,5.1%,112), total 100.0% Last reset 00:06:02 ago, cause: software Last software reset data not available Driver 0: pos 0, 400.0 steps/mm, standstill, SG min 0, read errors 0, write errors 1, ifcnt 25, reads 50226, writes 12, timeouts 0, DMA errors 0, CC errors 0, steps req 0 done 0 Moves scheduled 0, completed 0, in progress 0, hiccups 0, segs 0, step errors 0, maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0, ebfmin 0.00 max 0.00 Peak sync jitter 5/9, peak Rx sync delay 215, resyncs 0/0, no timer interrupt scheduled VIN voltage: min 24.1, current 24.2, max 24.2 MCU temperature: min 35.1C, current 35.6C, max 35.8C Last sensors broadcast 0x00000088 found 2 148 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 7393, send timeouts 0, received 4689, lost 0, free buffers 18, min 18, error reg 0 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0 Accelerometer: none Inductive sensor: not found I2C bus errors 4493, naks 4493, contentions 4493, other errors 4493 === Filament sensors === Interrupt 4 to 9us, poll 8 to 548us Driver 0: pos 2160.00, errs: frame 0 parity 0 ovrun 0 pol 0 ovdue 0 -
@droftarts I have found the issue, I suppose this is one for SuperSlicer...
The g-code exported from SuperSlicer 2.5.59 contains a
M204 P0 T0. This was certainly not the case in the past.I changed the following: Printer Settings > Machine limits > How to apply limits = "Disable"
Before this, it was set to "Use only as safeguards", but that and even "Use also for time estimate" gave an output ofM204 P0 T0?!I tested it with the change and can now print like normal (even on RC3). So case closed for you guys

-
 undefined marvineer marked this topic as a question
undefined marvineer marked this topic as a question
-
undefined marvineer has marked this topic as solved
-
@marvineer did you file a bug with SuperSlicer?
-
@oliof I was about to, but someone was faster (issue was from 3 weeks ago). It even seems fixed for the next release:
https://github.com/supermerill/SuperSlicer/issues/4048closed [BUG] M204 P0 T0 in RepRapFirmware #4048
-
@marvineer well done for spotting the issue! I had the same problem with PrusaSlicer the other day, though only got as far as simulation, when a normal job that usually simulated to 1hr 15m was going to be 73hrs! Slicers seem keen on supplanting machine configuration.
Ian
