Odd G4 Behaviour from Macro called from SD File
-
As part of the safety system for a machine, I've written
M3.9andM5.9macros which take the place of theM3andM5spindle commands - the idea is that a post-processor can callM3.9instead of the usualM3command and this will add an operator confirmation via anM291call if the spindle is currently off, as well as waiting a period of time for the spindle to accelerate before proceeding on to cutting.This delay time is machine and spindle specific which means it should be handled within the macro system I'm writing, because there are situations where the machine itself needs to stop and start the spindle outside of the control of the post-processor (e.g. parking and stopping the spindle during a tool change or during pause and resume).
I'm seeing some odd behaviour when my
M3.9macro is called from a print file, in that it looks like theG4dwell commands are not queued after theM3to change the spindle speed, but end up being run after all queued movements have completed (which appears to include queued movements that sequentially would execute after theG4).The Command Queueing section of the docs is a bit unclear to me on this front - it seems like movement commands after the call to my macro are being queued before the
G4command at the end of the macro.This is backed up by the
echorunning just before theG4showing in the console when I would expect theG4to execute.My understanding is that
G4orM400should wait for all queued moves to complete before executing, but it looks like this is happening out-of-order - as in, the movement commands after the macro call are queued while the macro is running, meaning that theG4at the end of the macro only gets to run at the end of the file.The docs do say that a command is NOT queued if the call contains an OM expression (mine do, obviously) but what does 'not queued' mean in this instance? It doesn't appear to be 'run instantly' and it also doesn't seem to be 'not run at all', it's looking like the
G4is queued but as part of a separate queue which is not executed sequentially with the movement commands and takes lower priority.Any ideas here, or ways I can mitigate this behaviour? I've tried an
M400at the top of theM3.9.gfile but this seems to cause RRF to get stuck "processing" the job and the only solution is to reboot the mainboard. Same with anM598.Notes:
RRF 3.5.0-rc3 stm32, not the version that fixes the multiple movement systems issues but I have code at the top of all of my macros to stop them executing in the secondary movement system.My
M3.9looks like this:; M3.9.g: SPINDLE ON, CLOCKWISE - WAIT FOR SPINDLE TO ACCELERATE ; ; It takes a bit of time to spin up the spindle. How long this ; requires depends on the VFD setup and the spindle power. The spindle ; needs to be controlled by both the firmware (for pause / resume ; amongst other things) and the post-processor, so we need an m-code ; that can be used by both and that means our wait-for-spindle dwell ; time only needs to exist in one place. ; USAGE: M3.9 [S<rpm>] [P<spindle-id>] [D<override-dwell-seconds>] ; Make sure this file is not executed by the secondary motion system if { !inputs[state.thisInput].active } M99 var sID = { (exists(param.P) ? param.P : global.mosSID) } var sStop = { spindles[var.sID].state == "stopped" } var sNC = { exists(param.S) && spindles[var.sID].current == param.S } var dwellTime = 0 ; D parameter always overrides the wait time if { exists(param.D) } set var.dwellTime = { param.D } else ; Dwell time defaults to the previously timed spindle acceleration time. ; This assumes the spindle is accelerating from a stop. set var.dwellTime = { global.mosSAS } ; If we're changing spindle speed if { exists(param.S) } ; If this is a deceleration, adjust dwellTime if { spindles[var.sID].current > param.S } set var.dwellTime = { global.mosSDS } ; Now calculate the change in velocity as a percentage ; of the maximum spindle speed, and multiply the dwell time ; by that percentage with 5% extra leeway. set var.dwellTime = { ceil(var.dwellTime * (abs(spindles[var.sID].current - param.S) / spindles[var.sID].max) * 1.05 * 10)/10 } var warnMsg = {"<b>CAUTION</b>: Spindle " ^ var.sID ^ " will now start. Check that workpiece and tool are secure, and all safety precautions have been taken before pressing <b>Continue</b>."} ; If the spindle is stopped if { var.sStop } ; If we're running a job, and we're not paused, pausing or resuming ; then warn the user and allow them to pause or abort the job. if { job.file.fileName != null && var.sStop && !global.mosEM && state.status != "resuming" && state.status != "pausing" && state.status != "paused" } M291 P{var.warnMsg} R"MillenniumOS: Warning" S4 K{"Continue", "Pause", "Cancel"} F0 if { input == 1 } M291 P{ "<b>CAUTION</b>: The job has been paused. Clicking <b>""Resume Job""</b> will start the spindle <b>INSTANTLY</b>, with no confirmation.<br/><b>BE CAREFUL!</b>" } R"MillenniumOS: Warning" S2 T0 M25 elif { input == 2 } abort { "Operator paused spindle startup!" } ; Otherwise just warn the user and allow them to abort. else M291 P{var.warnMsg} R"MillenniumOS: Warning" S4 K{"Continue", "Cancel"} F0 if { input == 1 } abort { "Operator aborted spindle startup!" } ; Spindle can now be started ; Account for all permutations of M3 command if { exists(param.S) } if { exists(param.P) } M3 S{param.S} P{param.P} else M3 S{param.S} elif { exists(param.P) } M3 P{param.P} else M3 if { result != 0 } abort { "Failed to control Spindle ID " ^ var.sID ^ "!" } ; Wait for the spindle to change speed if { var.dwellTime > 0 } echo { "Waiting " ^ var.dwellTime ^ " seconds for spindle to change speed" } G4 S{var.dwellTime}using the following global variables:
global mosEM = false global mosSID = 0 global mosSAS = 10 global mosSDS = 10and my test gcode file is something like this:
G28 G90 ; Park spindle G27 G0 X150 Y150 G91 ; This call to M3.9 seems to run fine - the spindle is not turned on until clicking Continue in the prompt ; and movement does not commence for a period while the G4 runs M3.9 S12000 while { iterations < 5 } G0 X-15 G0 Y-15 G0 X30 G0 Y30 ; This call to M3.9 does not prompt and changes the spindle speed (correct), but does not wait for the spindle ; to change speed (incorrect). M3.9 S24000 ; Neither of the M3.9 commands in here wait for the spindle to change speed either (incorrect) while { iterations < 5 } M3.9 S8000 G0 X-15 G0 Y-15 M3.9 S16000 G0 X30 G0 Y30 ; End of File - all G4 commands that were executed at the bottom of `M3.9` now run sequentially, delaying the end of the job. -
@NineMile That is a pretty complex test setup you have there I doubt if anyone will be able to reproduce it. I think you will need to try and simplify things if we are to get to the root cause of the problems. I'm struggling to imagine how adding m400 to the script would cause it to hang as well. It would be good to have simple test cases we can use to try and reproduce those problems.
-
@gloomyandy said in Odd G4 Behaviour from Macro called from SD File:
@NineMile That is a pretty complex test setup you have there I doubt if anyone will be able to reproduce it. I think you will need to try and simplify things if we are to get to the root cause of the problems. I'm struggling to imagine how adding m400 to the script would cause it to hang as well. It would be good to have simple test cases we can use to try and reproduce those problems.
I'll see if I can simplify the setup to reproduce the issue easier. Will reply once I have a simpler repro.
On the
M400front, I think the behaviour withM598is the same and I grabbed the output ofM122while the job was stuck processing.HTTPdoingM25was because I clicked the pause button in DWC to try and cancel the job.Movement locks held by File, null HTTP is doing "M25" in state(s) 0 File is doing "M598" in state(s) 0 0, running macro USB is ready with "M122" in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is doing "M400" in state(s) 0 0, running macro LCD is idle in state(s) 0 Daemon is doing "G4 P{global.mosDAEUR}" in state(s) 0 0, running macro Autopause is idle in state(s) 0 File2 is idle in state(s) 0, sync state 1 Queue2 is idle in state(s) 0 Q0 segments left 0, axes/extruders owned 0x0000003 Queue 0 has 'M3.9 P0 S24000' for move 43 Queue 0 has 'M3.9 P0 S12000' for move 45 Queue 0 has 'M3.9 P0 S24000' for move 47 Queue 0 has 'M3.9 P0 S12000' for move 49 Queue 0 has 'M3.9 P0 S24000' for move 51 Queue 0 has 'M3.9 P0 S12000' for move 53 Queue 0 has 'M3.9 P0 S24000' for move 55 Queue 0 has 'M3.9 P0 S12000' for move 57 Queue 0 has 'M3.9 P0 S24000' for move 59 Q1 segments left 0, axes/extruders owned 0x0000000 Code queue 1 is emptyWhich looks to me like it has queued
M3.9commands to be interspersed with the move queue, but theM3.9macro is waiting for the queued moves to finish - and they can't finish because they're waiting for the queue to empty. -
@gloomyandy I've tried to simplify this as much as possible (using
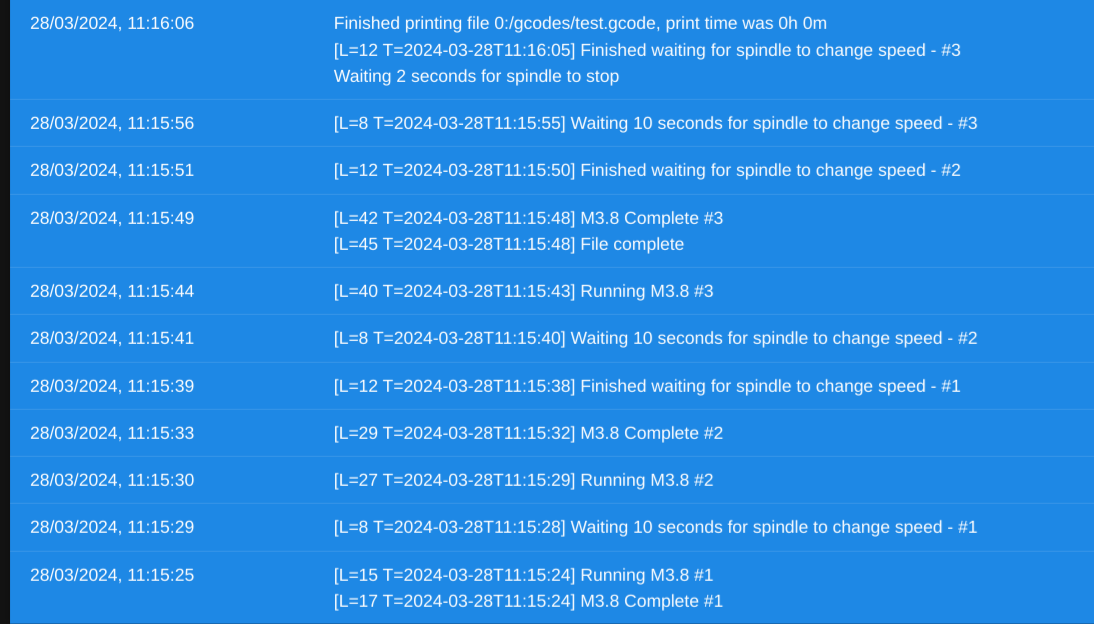
M3.8so is not touching the complexM3.9command from above)M3.8.g:if { !inputs[state.thisInput].active } M99 var dwellTime = 10 M3 P0 S{param.S} echo { "[L=" ^ line ^ " T=" ^ state.time ^ "] Waiting " ^ var.dwellTime ^ " seconds for spindle to change speed - #" ^ param.I } G4 S{var.dwellTime} echo { "[L=" ^ line ^ " T=" ^ state.time ^ "] Finished waiting for spindle to change speed - #" ^ param.I }test.gcode:(Home) G28 (Movement Configuration) G90 G21 (Park ppindle) G0 Z0 (Move to center of table) G0 X150 Y150 (Start spindle) echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] Running M3.8 #1" } M3.8 S24000 I1 echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] M3.8 Complete #1" } (Do some moves) G0 X100 Y100 G0 X0 Y200 G0 X200 Y0 G0 X100 Y100 G0 X40 Y80 (Change spindle speed) echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] Running M3.8 #2" } M3.8 S12000 I2 echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] M3.8 Complete #2" } (Do some more moves) G0 X50 Y100 G0 X0 Y200 G0 X200 Y0 G0 X100 Y100 G0 X80 Y40 G0 X150 Y150 (Stop spindle) echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] Running M3.8 #3" } M3.8 S0 I3 echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] M3.8 Complete #3" } G0 X0 Y0 echo { "[L=" ^ line ^ " T=" ^ state.time ^ "] File complete" }When running the
test.gcodefile, I would (naively I guess) expect there to be a 10 second pause after the machine moves to the centre of the table, and then another 10 second pause after 5 moves. I'd then expect the final 10 second wait to stop the spindle and then a move toX150 Y150.What actually happens is
M3.8is triggered as soon as the machine starts moving from the home location toX150 Y150, and then the machine continues moving from the centre point straight away, logging that it is waiting but actually proceeding with the moves. It then runs the nextM3.8command and completes that command before theG4from the previous call toM3.8has finished.After that point I'm not entirely sure what happens, but there is a 17 second delay after the
File Completemessage before the job actually completes, which makes me think there are multipleG4s in the queue still being processed sequentially.Full log of the file running in the screenshot below:
I haven't managed to get any particularly useful info from interspersing
M122into the print (I'm not even sure how to do this properly given that they're queued differently, aside fromFileprocessing the movement commands (and theM3.8macro) and theG4commands ending up inQueue:Movement locks held by null, null HTTP is idle in state(s) 0 File is doing "G0 X40 Y80" in state(s) 0 USB is ready with "M122" in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is doing "G4 S{var.dwellTime}" in state(s) 0 0, running macro LCD is idle in state(s) 0 Daemon is doing "G4 P{global.mosDAEUR}" in state(s) 0 0, running macro Autopause is idle in state(s) 0 File2 is idle in state(s) 0, sync state 2 Queue2 is idle in state(s) 0 Q0 segments left 1, axes/extruders owned 0x0000007 Code queue 0 is empty Q1 segments left 0, axes/extruders owned 0x0000000 Code queue 1 is empty -
@NineMile What happens without the M3 commands in your files? I have no way of running those commands, so really need an example without them.
-
@gloomyandy Just to be clear I mean the actual M3 spindle control commands not the M3.8 ones.
-
@gloomyandy said in Odd G4 Behaviour from Macro called from SD File:
@gloomyandy Just to be clear I mean the actual M3 spindle control commands not the M3.8 ones.
With the
M3 P0 S{param.S}line removed I see the following, and no pause in movement after 5 moves - so it looks like the behaviour is the same even without theM3.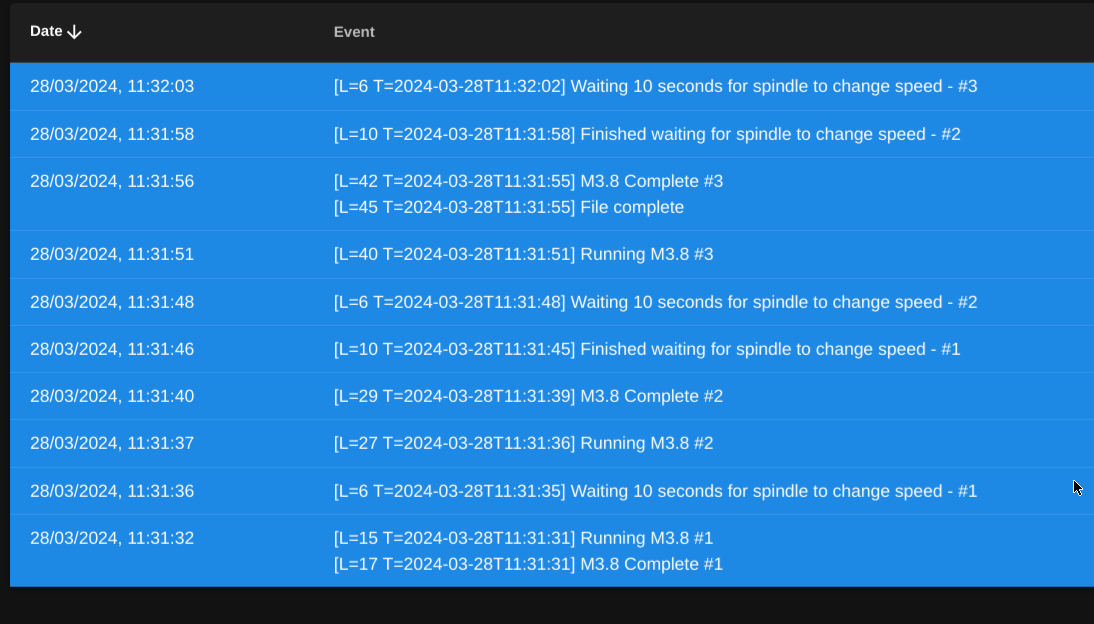
-
@NineMile If you substitute M98 calls to your M3.8 macro does the test do what you expect? I've just tried that on my test system and it seems to work as you might expect it to work. So I basically replaced
M3.8 S24000 I1
with
M98 p"M3.8.g" S24000 I1
and made similar changes to other parts of the test (noting the change to the parameters).So this is the test file I have been using (I had to make some changes because I can't run in CNC mode):
;(Home) ;G28 ;(Movement Configuration) G90 G21 ;(Park ppindle) G0 Z10 ;(Move to center of table) G0 X150 Y150 ;(Start spindle) echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] Running M3.8 #1" } ;M3.8 S24000 I1 M98 p"M3.8.g" S24000 I1 echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] M3.8 Complete #1" } ;(Do some moves) G0 X100 Y100 G0 X0 Y200 G0 X200 Y0 G0 X100 Y100 G0 X40 Y80 ;(Change spindle speed) echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] Running M3.8 #2" } ;M3.8 S12000 I2 M98 p"M3.8.g" S12000 I2 echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] M3.8 Complete #2" } ;(Do some more moves) G0 X50 Y100 G0 X0 Y200 G0 X200 Y0 G0 X100 Y100 G0 X80 Y40 G0 X150 Y150 ;(Stop spindle) echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] Running M3.8 #3" } ;M3.8 S0 I3 M98 p"M3.8.g" S0 I3 echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] M3.8 Complete #3" } G0 X0 Y0 echo { "[L=" ^ line ^ " T=" ^ state.time ^ "] File complete" }Without the above change, I think I'm basically seeing what you are seeing with the dwell commands not running until the end of the file (at least that is what it looks like, it is a little confusing).
-
@gloomyandy said in Odd G4 Behaviour from Macro called from SD File:
@NineMile If you substitute M98 calls to your M3.8 macro does the test do what you expect? I've just tried that on my test system and it seems to work as you might expect it to work. So I basically replaced
M3.8 S24000 I1
with
M98 p"M3.8.g" S24000 I1
and made similar changes to other parts of the test (noting the change to the parameters).So this is the test file I have been using (I had to make some changes because I can't run in CNC mode):
;(Home) ;G28 ;(Movement Configuration) G90 G21 ;(Park ppindle) G0 Z10 ;(Move to center of table) G0 X150 Y150 ;(Start spindle) echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] Running M3.8 #1" } ;M3.8 S24000 I1 M98 p"M3.8.g" S24000 I1 echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] M3.8 Complete #1" } ;(Do some moves) G0 X100 Y100 G0 X0 Y200 G0 X200 Y0 G0 X100 Y100 G0 X40 Y80 ;(Change spindle speed) echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] Running M3.8 #2" } ;M3.8 S12000 I2 M98 p"M3.8.g" S12000 I2 echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] M3.8 Complete #2" } ;(Do some more moves) G0 X50 Y100 G0 X0 Y200 G0 X200 Y0 G0 X100 Y100 G0 X80 Y40 G0 X150 Y150 ;(Stop spindle) echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] Running M3.8 #3" } ;M3.8 S0 I3 M98 p"M3.8.g" S0 I3 echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] M3.8 Complete #3" } G0 X0 Y0 echo { "[L=" ^ line ^ " T=" ^ state.time ^ "] File complete" }Without the above change, I think I'm basically seeing what you are seeing with the dwell commands not running until the end of the file (at least that is what it looks like, it is a little confusing).
Yep using
M98 P"M3.8.g"...works as I would expect - so there's a difference in the wayM98runs macros vs how macros are run when they're called directly by their M-Code?What's the chances that these can be made to work in the same manner?
I tried using an intermediate macro (So the gcode runs
M3.7andM3.7runsM98 P"M3.8.g" ...but that exhibited the previous ("broken") behaviour. -
-
 undefined NineMile referenced this topic
undefined NineMile referenced this topic
-
 undefined Phaedrux marked this topic as a question
undefined Phaedrux marked this topic as a question
-
@NineMile said in Odd G4 Behaviour from Macro called from SD File:
Notes: RRF 3.5.0-rc3 stm32, not the version that fixes the multiple movement systems issues but I have code at the top of all of my macros to stop them executing in the secondary movement system.
If this issue occurs only when the macro is called from a job file then please try a more recent firmware build.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 I've tried the same code with yesterday's build and it did the same thing for me.See this post for details: https://forum.duet3d.com/post/336370
-
@dc42 Just to clear with the build as of 27th Mar, the version of the file using M3.8 directly does not seem to delay when you might expect it to. The version using M98 to run the same macro file does delay as expected.
I've just tried the same test files on a Duet3 running 3.5.0-rc.3+8 and see the same "odd" behaviour with the macro being "called" as a substitute for a gcode then the dwell does not happen when expected (they seem to happen at the end of the print), but with the same macro call using M98 then the dwell happens as expected.
These are the test files I used on the duet3, first the file I print (from my "jobs" directory):
G92 X0 Y0 M564 H0 ;(Home) ;G28 ;(Movement Configuration) G90 G21 ;(Park ppindle) ;(Move to center of table) G0 X150 ;(Start spindle) echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] Running M3.8 #1" } M3.8 S24000 I1 ;M98 p"M3.8.g" S24000 I1 echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] M3.8 Complete #1" } ;(Do some moves) G0 X100 G0 X0 G0 X200 G0 X100 G0 X40 ;(Change spindle speed) echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] Running M3.8 #2" } M3.8 S12000 I2 ;M98 p"M3.8.g" S12000 I2 echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] M3.8 Complete #2" } ;(Do some more moves) G0 X50 G0 X0 G0 X200 G0 X100 G0 X80 G0 X150 ;(Stop spindle) echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] Running M3.8 #3" } M3.8 S0 I3 ;M98 p"M3.8.g" S0 I3 echo {"[L=" ^ line ^ " T=" ^ state.time ^ "] M3.8 Complete #3" } G0 X0 echo { "[L=" ^ line ^ " T=" ^ state.time ^ "] File complete" }Then the M3.8 macro (that goes in system):
;if { !inputs[state.thisInput].active } ; M99 var dwellTime = 10 echo { "[L=" ^ line ^ " T=" ^ state.time ^ "] Waiting " ^ var.dwellTime ^ " seconds for spindle to change speed - #" ^ param.I } G4 S{var.dwellTime} echo { "[L=" ^ line ^ " T=" ^ state.time ^ "] Finished waiting for spindle to change speed - #" ^ param.I }Note my Duet3 is a bench test system that only has a single stepper motor attached (as X) and has no homing switches hence the changes to allow the print file to run. I don't think any of these changes make any difference to the problem described here.