Wiring BIQU microprobe to Duet RotoToolBoard
-
I do have one stepper motor as well as my BTT microprobe connected to the Roto board.
I first wanted to verify if the microprobe was working using command like M42 S0 S1/S0 before trying to home anything. However, I cannot control it.In the past I successfully managed to control the stepper sending it extrusion commands but since I plugged-in the Raspberri Pi to get the 5g Wifi - it is now impossible to command the stepper either.
Here is my config.g:
config.g -
@Timothee-Leblond your config.g:
; Default config.g template for DuetPi ; Replace this with a proper configuration file (e.g from https://configtool.reprapfirmware.org) ; Display initial welcome message M291 P"You are operating an SBC image in standalone mode. Please see <a href=""https://www.duet3d.com/StartHere"" target=""_blank"">here</a> further information." R"Welcome to your new Duet 3!" S1 T0 ; Enable PanelDue M575 P1 B57600 S1 ; Enable network ; M552 P0.0.0.0 S1 ; Configuration file for RepRapFirmware on Duet 3 Mini 5+ Ethernet ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.5.8 on Fri Dec 13 2024 08:59:52 GMT-0500 (Eastern Standard Time) ; General G90 ; absolute coordinates M83 ; relative extruder moves M550 P"Duet 3" ; set hostname ; Accessories M575 P1 S0 B57600 ; configure PanelDue support ; Wait a moment for the CAN expansion boards to become available G4 S2 ; Smart Drivers M569 P0.0 S1 D2 ; driver 0.0 goes forwards (X axis) M569 P0.1 S1 D2 ; driver 0.1 goes forwards (Y axis) M569 P0.2 S1 D2 ; driver 0.2 goes forwards (Z axis) M569 P121.0 S0 D2 ; driver 20.0 goes forwards (extruder 0) ; Motor Idle Current Reduction M906 I30 ; set motor current idle factor M84 S30 ; set motor current idle timeout ; Axes M584 X0.0 Y0.1 Z0.2 ; set axis mapping M350 X16 Y16 Z16 I1 ; configure microstepping with interpolation M906 X800 Y800 Z800 ; set axis driver currents M92 X80 Y80 Z400 ; configure steps per mm M208 X-6:310 Y0:310 Z-5:405 ; set minimum and maximum axis limits M566 X900 Y900 Z12 ; set maximum instantaneous speed changes (mm/min) M203 X6000 Y6000 Z180 ; set maximum speeds (mm/min) M201 X500 Y500 Z20 ; set accelerations (mm/s^2) ; Extruders M584 E121.0 ; set extruder mapping M350 E16 I1 ; configure microstepping with interpolation M906 E1600 ; set extruder driver currents M92 E28.09 ; configure steps per mm M566 E120 ; set maximum instantaneous speed changes (mm/min) M203 E3600 ; set maximum speeds (mm/min) M201 E250 ; set accelerations (mm/s^2) ; Kinematics M669 K0 ; configure Cartesian kinematics ; Probes M950 P0 C"121.io0.out" ; Set servo output on Rototoolboard M558 P9 H6 F250:30 T8000 C"^!121.io0.in" ; Set probe input to IO_0 on Rototoolboard G31 P500 X0 Y0 Z0 ; set Z probe trigger value, offset and trigger height ; Endstops M574 X1 S3 ; configure X axis endstop M574 Y1 S3 ; configure Y axis endstop M574 Z1 S2 ; configure Z axis endstop M915 X Y R0 F0 ; Tools M563 P0 S"MainExtruder" D0 F0 ; create Tool 0 using Extruder Drive 0 G10 P0 S0 R0 ; set Tool 0 active and standby temperatures to 0 T0 ; select Tool 0 at startupsend
M98 P"config.g"and see if it reports any errors. I think your tool has a fan defined, but no fan has been defined, so the tool command will error. Remove the 'F0' from the M563 line.Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
-
@Timothee-Leblond said in Wiring BIQU microprobe to Duet RotoToolBoard:
since I plugged-in the Raspberri Pi to get the 5g Wifi - it is now impossible to command the stepper either.
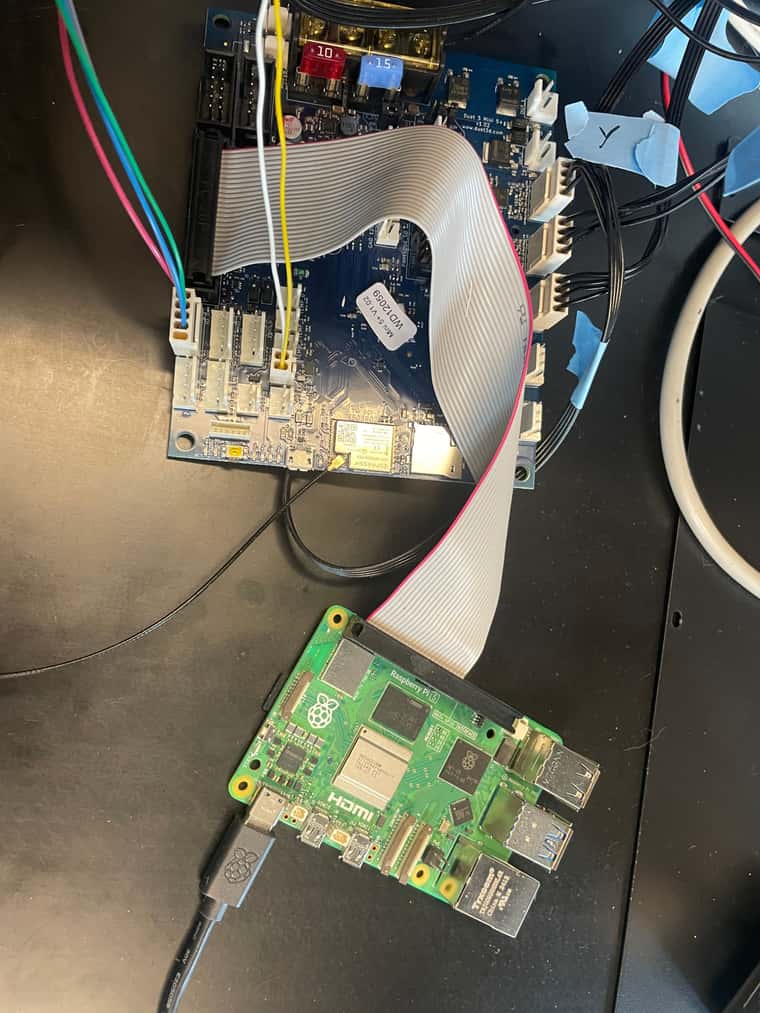
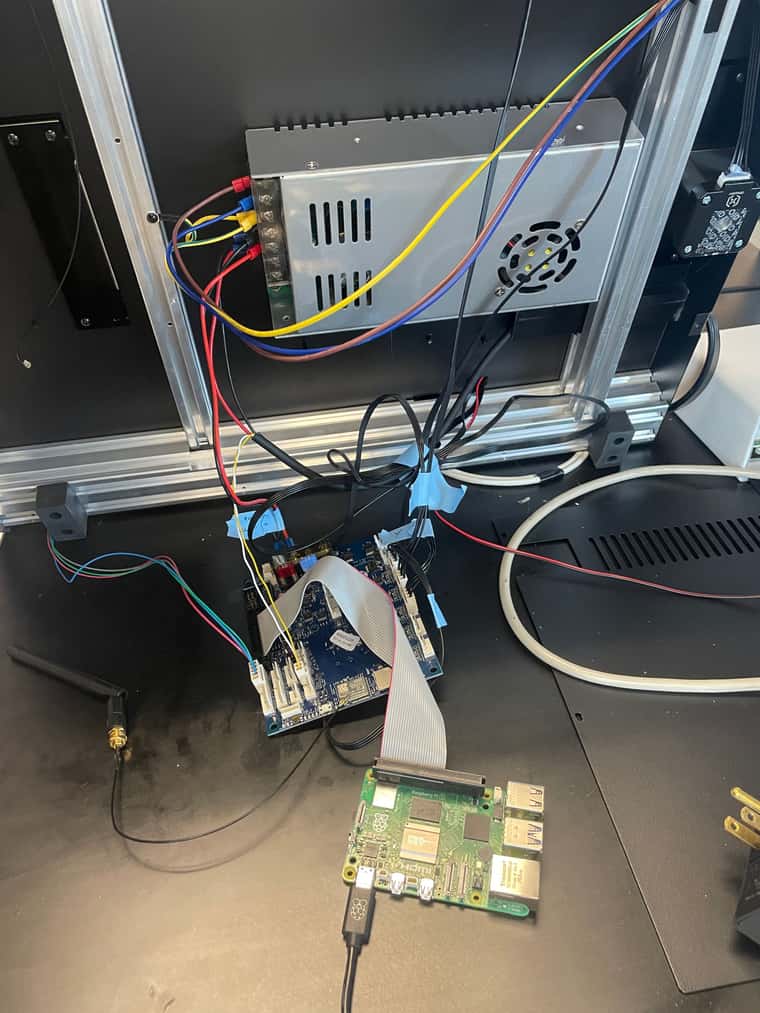
Can you show some photos of your setup please? How is the Pi connected to the Duet and how is it powered?
-
I've been testing two MicroProbes with a Duet 3 Mini 5+.
When power is applied the probe does it's normal self-test.
After that I can issue one probe deploy command M280 P0 S10.
The pin extends, then retracts.
After that the probe no longer responds to any commands but sits there deploying/retracting, seemingly at random.
As I test I replaced it with a BLTouch and that works just as expected.
I think there is something wrong with the design of the MicroProbe.
Frederick
Printers: a E3D MS/TC setup and a RatRig Hybrid. Using Duet 3 hardware running 3.4.6
-
The Pi is connected to the Duet using the big ribbon that came with it. The Pi is powered by a Raspberry Power supply and the Duet by the power supply of my last printer (Artillery Sidewinder x4 plus). The SD card is in the Raspberry. It seems like it is working as I can connect to DWC through wifi which was not possible through the Duet alone (5g network).
-
Hi Frederic,
Even though you cannot control them, are the microprobe working fine during printing?
I'm afraid crashing the printhead on the bed... -
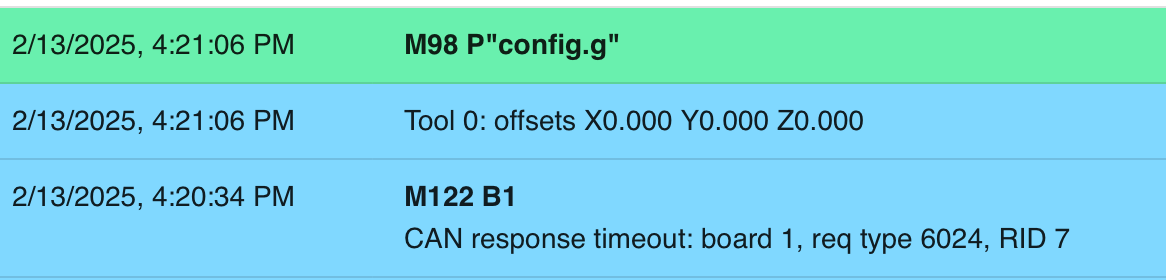
Can you share the results of sending M122, M122 B1 and M98 P'config.g" in the gcode console?
Also please share your full config.g
-
Here is the answer after M98 and M122 B1:
Here is the answer for M122:
console.txtHere is my full config.g:
config-2.g -
Can you try changing
M950 P0 C"121.io0.out" ; Set servo output on Rototoolboard
to
M950 S0 C"121.io0.out" ; Set servo output on Rototoolboard -
Still not working. Commands are sent but no answer.
What triggers me is that the stepper is not moving either although I know it was working. -
Do you think it could have something to do with the Raspberry?
-
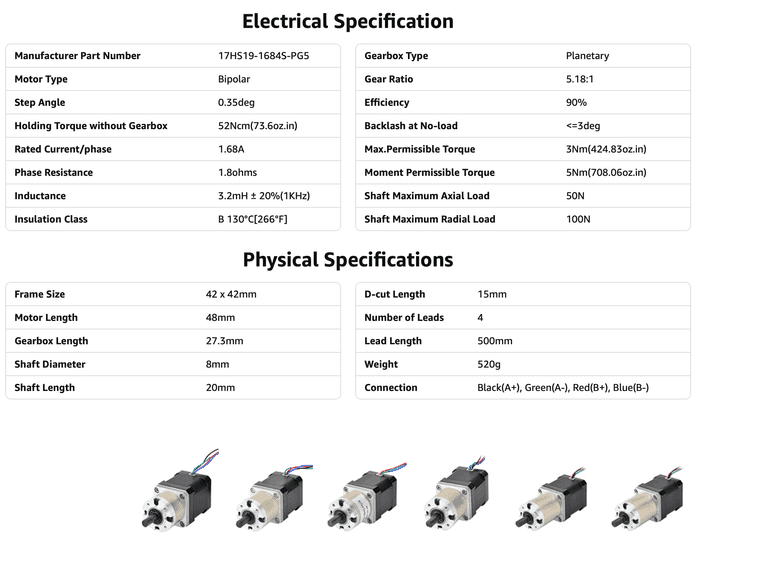
What kind of stepper are you trying to drive?
Your current appears to be set above what the roto board can actually support.
M906 E1600 ; set extruder driver currentsThough I believe the firmware will limit it to 1 amp anyway.
How are you trying to test the stepper? As it is part of a tool, you would need to either heat up the hotend or enable cold extrusion, though I don't see any heaters defined in your config.g.
-
I don't need any heater nor fan on my tool this why I don't have such things.
The cold extrusion command is part of my Gcode file though. However I'm testing the motor in DWC sending extrusion commands like G1 E10 F300. But this isn't working anymore...The motor is this one:
-
Hi,
The probe is not working at all except for the random deploy/retract - which is not a good thing.
Frederick
-
@fcwilt said in Wiring BIQU microprobe to Duet RotoToolBoard:
The probe is not working at all except for the random deploy/retract - which is not a good thing.
My guess is that either you have a bad connection in the control wire between the microprobe and the TOOL1RR, or the microprobe isn't compatible with the 3.3V signal level provided by the TOOL1RR. Have you a specification for the control signal required by the microprobe?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 @Timothee-Leblond It does seem to need a 5V signal, see https://github.com/bigtreetech/MicroProbe/blob/master/MicroProbe V2 User Manual_20240330.pdf.
I would try connecting it to the Mini 5+ servo pin, and changing the probe setup. For wiring, see https://docs.duet3d.com/en/User_manual/Connecting_hardware/Z_probe_BLTouch#wiring but wire the servo control wire (and 5V and GND, if you want) to 5V_PWM header on the Mini 5+. Then change your config to:
; Probes M950 P0 C"out6" ; Set servo output on Mini 5+ M558 P9 H6 F250:30 T8000 C"^!io6.in" ; Set probe input to IO_6 on Mini 5+ G31 P500 X0 Y0 Z0 ; set Z probe trigger value, offset and trigger heightIf possible, test your stepper motor on the Mini 5+ as well. If you can get that working, we can then look at why the Roto board isn't working.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
But what I can see, the pin on the Roto board is a 5V as well?

Sorry for my confusion but could you please point out the recommended pins on the wiring map?
As the wiring manual does indicate any duet board, I do not want to do any mistakes...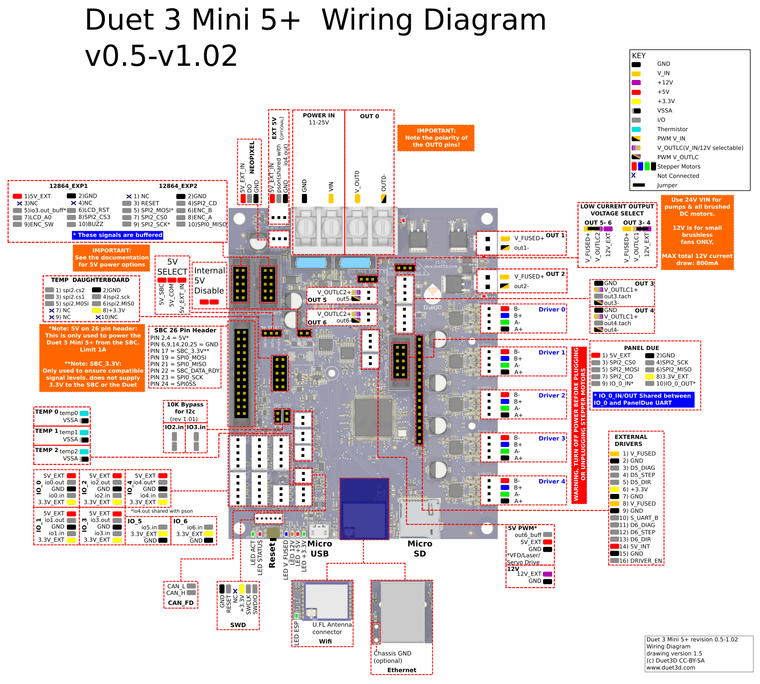
Thank you for your precious help!
-
-
@Timothee-Leblond said in Wiring BIQU microprobe to Duet RotoToolBoard:
But what I can see, the pin on the Roto board is a 5V as well?
The power provided on that pin is 5V but the signal level on the IO0_OUT pin is 3.3V. Most electronics devices these days (including BLTouch) are happy with 3.3V signal levels.
EDIT: according to https://biqu3d.com/blogs/news/biqu-microprobe-new-leveling-technology-that-defines-new-standards the microprobe is compatible with 3.3V control signals.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com
