Core XY high speed closed loop tuning
-
Hi,
i need help tuning my XY motors on my corexy, i want to run them in closed loop. I want to run 250mm/s 10K-20Kmm² for printing and 800-1000mm/s 50K-60K for travel with 3000 Jerk. The problem now is that the pid tune for printing moves isns't good for travel moves. For now i use a p therm off 30 should i increase it or is it better to increase the A and V therm?
-
@Tech_Sam03 please post the plots from the closed loop plugin using your current PID values, showing the number of steps, the PID terms and the total error; at both your print speed and proposed travel speed.
Are you using 48V power to the motors?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
Yes, i run them at 48V!
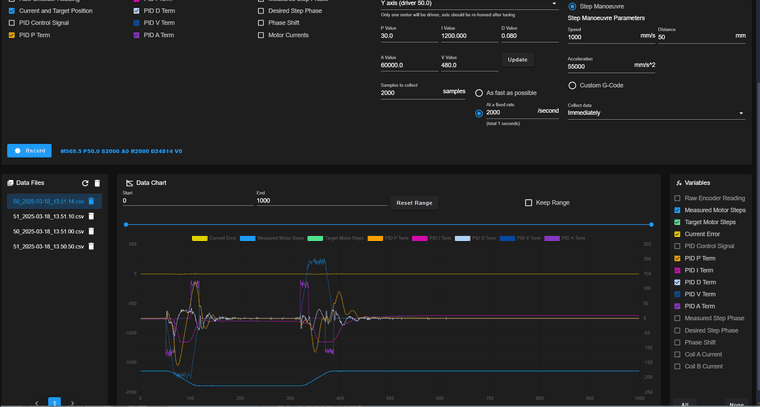
This is X axis print speed:

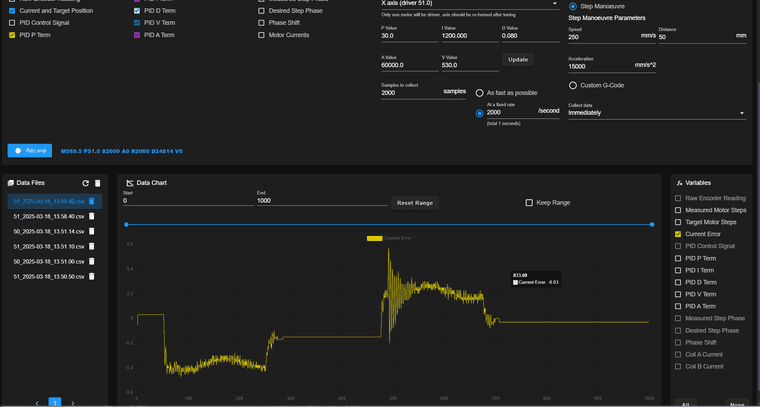
(X-Print)51_2025-03-18_13.50.50.csvY axis print speed:

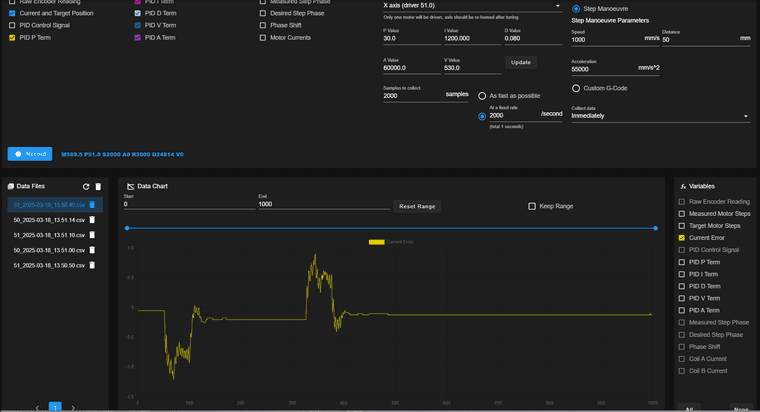
(Y-Print)50_2025-03-18_13.51.00.csvX axis travel speed:

(X-Travel)51_2025-03-18_13.51.10.csvY axis travel speed:
(Y-Travel)50_2025-03-18_13.51.14.csvThis is in open loop:
-
I wanted to get in touch again. I've put the closed loop project on hold for a while and now I want to get back to it. My main problem is the big error when accelerating and decelerating.
-
@Tech_Sam03 what amount of error are you are getting when accelerating and decelerating, and is it during printing moves, travel moves, or both?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
About */-~1.5 Steps of error in the closed Loop Tuning Plugin. I have set my error boundary to E2:3. I don't get any messages while printing, but I do get them when traveling.
-
@Tech_Sam03 thank you. Is this with the Pid A term optimised for travel moves or for printing moves? What acceleration are you using for travel moves?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42
I use a travel acceleration of 40k mm/s. I tuned it between travel and printing Speed. -
I did a quick, rough tuning to see if I was making any mistakes.
Step 1 Speed and Accels
Speed too low
Speed OkStep 2 A therm

A too low (A30.000)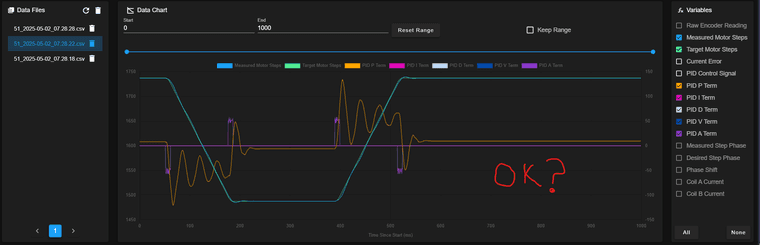
A therm is ok(A40.000)
A too heigh odd spikes in P therm(A50.000)Step 3 V therm

V too low(V300)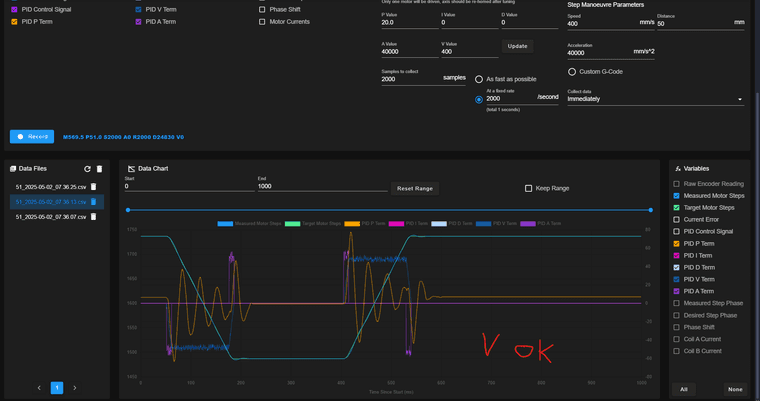
V ok(V400)
V too high(V500)Step 4 D therm

D ok(D0.1)
D better but to loud(D0.2)Step 5 I therm

P20 A40.000 V400 D0.1 I0 Current tune no steady error. Do i even need a I therm because i dont really have a steady-state error?
I500
I1000
I1500System specs:
-Version 3.6.0-RC3
-LDO 42STH48-2504AC i pressed in a longer shaft in the rotor to fit an encoder to the back
-48V
-2500A for the motors
-AMT10E3 encoder 2000PPR -
@Tech_Sam03 before you added the D term you had a lot of ringing in the P term. You would also have seen this in the Current Error had you plotted it. That's an indication that the P term is too large. A small amount of ringing can be countered by adding a small D term, but as you discovered, larger D terms make the motor noisier.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
This is the plot befor adding the D therm

Should i use 30-50% off the current P therm and test again?
-
@Tech_Sam03 you may not need to reduce the P term by as much as that. Try 50 to 70% of the current value.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
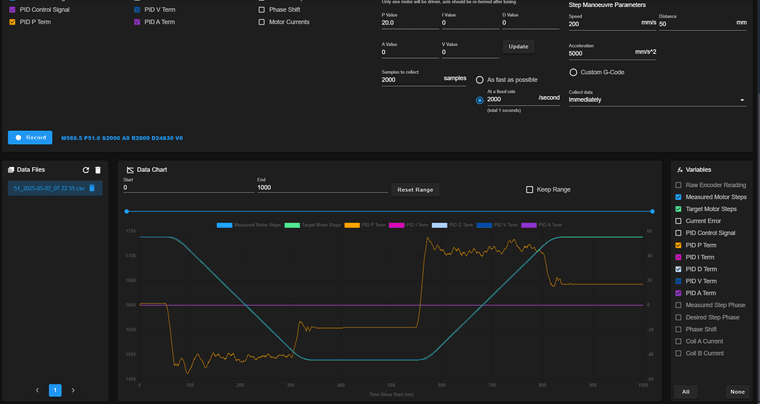
I tried a P therm of 15. But i get those high peaks (Error/PID) in the accelereation segments of the move.
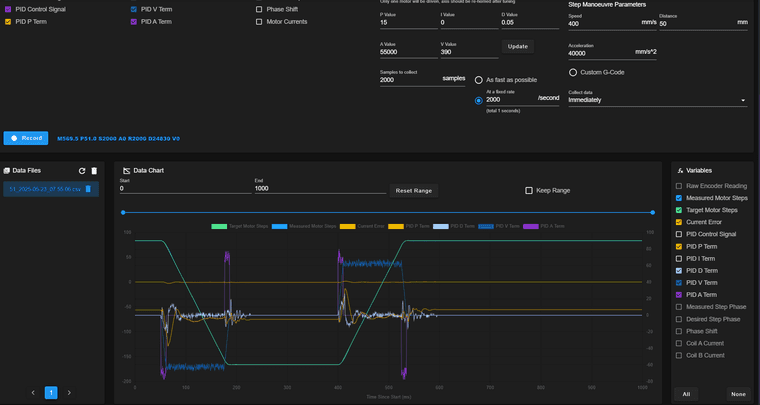
-
@Tech_Sam03 that plot suggests that the A term was too low or the maximum motor current too low.