Hydra 400 - Tool Changing 3D Printer
-


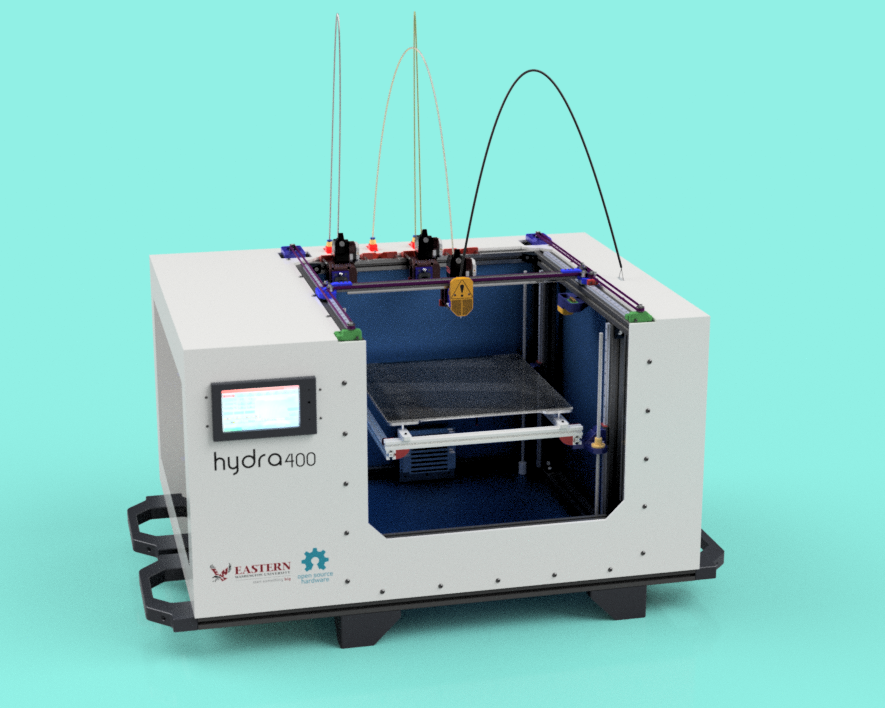
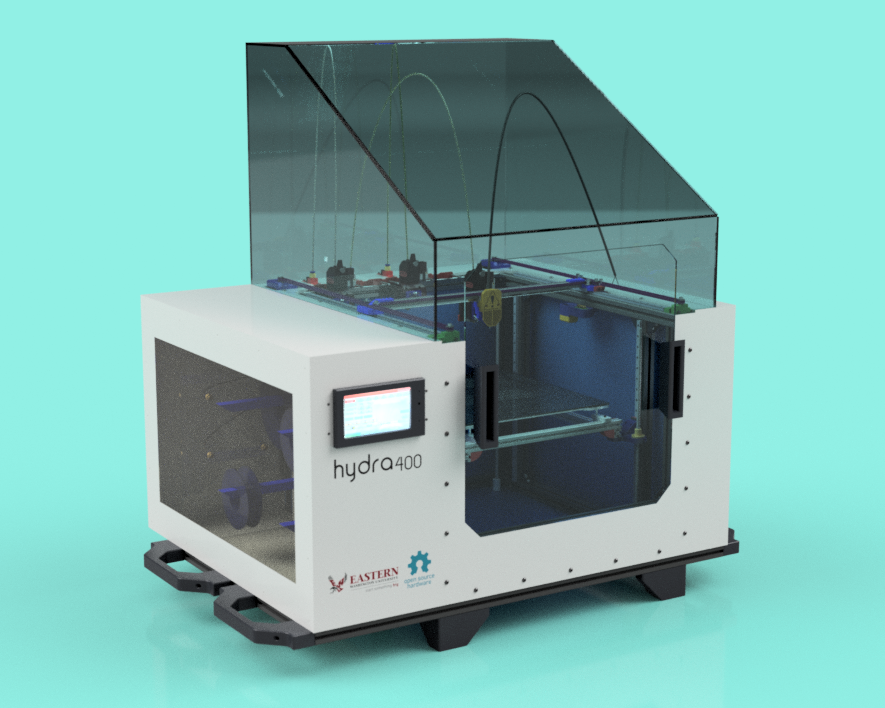
I would like to present the Hydra 400 - a tool changing 3D printer with a 400mm cubed build volume, rigid frame made from 3030 and 3060 aluminum, integrated filament bay, and heated enclosure. We will be using the Duet 2 Wifi with a DueX5 to power all of the steppers and associated things we will be including.
I and my senior capstone team at my university have spent the last 7 weeks designing this, and will build the machine in the fall. The tool changer mechanism we are using can be found here: https://www.thingiverse.com/thing:3365456 all credit goes to the original designer, and many thanks for him releasing it open source. At this point the design is about 95% complete, with some small details here and there that still need to be figured out.
This forum and its community have provided a huge source of inspiration for this project. As project lead, the knowledge gained from this forum and others enabled me to very quickly and efficiently determine the most feasible design choices for our limited amount of time given for design, allowed me to make quick design choices, and effectively demonstrate to our professor that though our scope of work is large, we would be able to deliver upon all of our stated goals.
We are planning on releasing our design files, full bill of material with links to where we are sourcing components, and config.g and Cura machine profiles once we are finished with the project; open source is the whole reason behind the state of the 3D printing industry currently and we would love to contribute to it.
-
@red-sand-robot fantastic looking design. It's worth mentioning that the mechanism you are using is itself inspired by the e3d toolchanger mechanism.
Can't wait to see the completed machine.
-
@t3p3tony Our main inspiration was the e3D ToolChanger! As soon as I saw videos of that I knew i wanted to do something similar for my senior project.
My team and I only have around 8 weeks to do the design of the machine, so that open source cable driven tool changer mechanism seemed like the cheapest, easily made/modified, and most reliable method we could find. It would have added to our scope of work to also design a tool change mechanism from scratch, and although doable it seemed more practical to make use of and modify a preexisting design.
We're using Markforged-style kinematics for the XY axis, and I haven't seen much on the forum about people actually making use of that kinematic class in the firmware so it will be interesting to get that working.