Connecting a Stepper Driver Expansion to a duet 2 wifi
-
I have some spare/extra parts from a different project and I was wondering if there is any way to connect these parts together for more stepper motors
I have:
-Duet 2 wifi
-Maestro Dual Stepper Driver Expansion Module
-Expansion header breakout boardI have looked through the diagrams but I can't figure it out completely with one i could connect tot the Expansion module because some seem to be either missing
Breakout board / Stepper Driver Expansion Module
E2_STEP / E2_STEP
E2_EN / E2_EN
E2_STOP / ?
E2_DIR / E2_DIR
+3.3V / +3.3V
GND / GND
? / VIN
? / E2_UART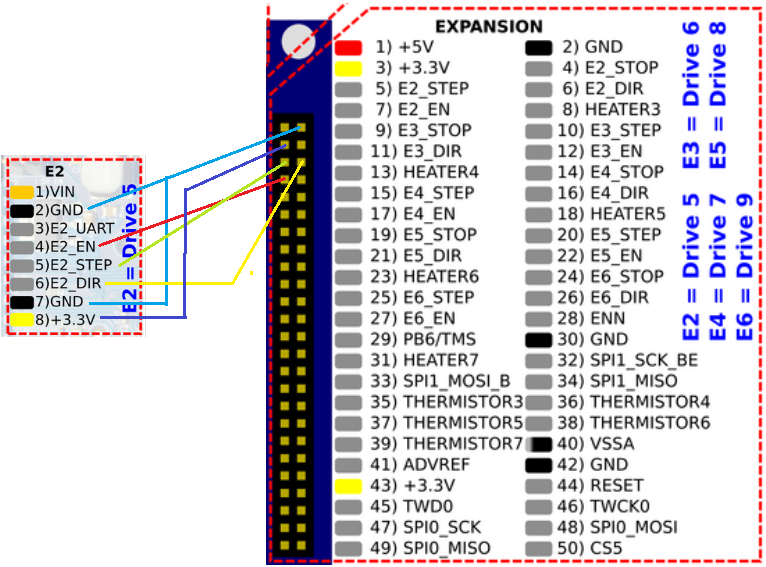
-
If I am understanding correctly, and I may not be because I don't have those parts right in front of me...
VIN would be motor voltage (12 or 24V)
However... it looks to me like one set of that hardware uses SPI to program the chips and the other uses UART. If this is true, they cannot really be lashed up the way you are seeking.
Again... grain of salt...
-
Did you ever get this to work? I have a Duet WIFI and was wondering if I could use the Maestro Stepper Expansion Module as it is much cheaper than the Duex5 and all the Duex2 are out of stock everywhere!
-
this won't fully work as the duet 2 firmware doesn't support different types of drivers. As it has 2660's built in, you couldn't use the 2224's found on the maestro without having a custom build of the firmware.
-
@jay_s_uk thank you for the reply guess I'll just look into getting the maestro and saving my Duet WiFi for another build
-
@Fern528 theres always the LPC/STM32 port if you have any of the supported hardware https://teamgloomy.github.io/supported_boards.html
-
@jay_s_uk I didn't know about this thanks for the info. If I'm understanding this correctly duet boards can drive TMC drivers like the ones that come with the BTT/MKS boards, the drivers in the pololu driver style PCB? I ask because I have plenty of TMC2208/9s.
-
@Fern528 again, the firmware is only built to handle one stepper driver type.
You can drive the 2208/09's but you wouldn't be able to communicate with them so you would have to set the current and steps etc manually.
It would also mean no control over spreadcycle/stealthchop or sensorless homing supportOwns various duet boards and is the main wiki maintainer for the Teamgloomy LPC/STM32 port of RRF. Assume I'm running whatever the latest beta/stable build is
-
@jay_s_uk
Wondering if there is really such a big difference in 2660 and 2209 setup? They are from the same company.
Maybe the current setting only needs a lookup-table to figure out which current-setting for 2660 matches the 2209 current we want?
Or is it pulse timing, too? AFAIK, we can set that for external drivers, why not for 2209?
I'm just curious, because the Duet3-mini comes with an expansion port for two more steppers and I'd like to know, if there's a chance to run this expansion board with Duet2 HW. -
@o_lampe 2660 use SPI for communication, 2209 use 2660.
For the mini 5+ you'll need the expansion board designed for that. -
@jay_s_uk sorry about that had a brain fart moment, I understand now I got confused because the link you provided says those drivers are supported but that's for the LPC boards I assumed it meant RRF in general has support for those and since Duet is running RRF I assumed it could drive them but I get it wasn't designed to support them via hardware well it does but I'd lose a lot of functionality. I get it now it's the same thing with those marlin boards some support the UART, or SPI but never both interfaces because the pins are not broken out, etc. Thanks for all your help Jay, I'm barely learning RRF and getting into the Duet ecosystem.