Rat rig v-core pro COREXYU
-
Yes
but I have a problem,
it tells me motor
phase a,
phase b,
disconect and the descent bed instead
to go up
c complicated for i find idex markforged ?? I mounted the motor for the carriage and everything
the host is missing,
I understood that duet supported all the modes
slim
I hope to find I will have to transform everything into a CartezienneOui
Mais j'ai un problème,
ça me dit moteur
phase a,
phase b,
déconnecter et le lit de descente à la place
à monterc compliqué car je trouve idex markforged ?? J'ai monté le moteur pour le chariot et tout
l'hôte manque,
J'ai compris que le duo supportait tous les modes
svelte
J'espère trouver que je vais devoir tout transformer en cartezienne -
@neetspeed said in Rat rig v-core pro COREXYU:
it tells me motor
phase a,
phase b,How fast are you trying to move the motors?
Has it always done that, or is that new?
How do you have the motors.@neetspeed said in Rat rig v-core pro COREXYU:
I understood that duet supported all the modes
Anything is possible, but I'm not aware of anyone who has done it yet. Hopefully will have more details soon.
-
c good i forgot the jumpers to disconnect the second motor from z
but nothing to do e1 goes in the wrong directionc bon j'ai oublié les cavaliers pour déconnecter le deuxième moteur de z
mais rien à faire e1 va dans la mauvaise directionut nothing to do e1 goes in the wrong direction -
maybe dc42,
I noticed that he had mentioned this in a suget in a subject on the netpeut-être dc42,
J'ai remarqué qu'il avait mentionné cela dans un suget dans un sujet sur le net -
for bed correction ç OK g32c ok
I miss details and chario u I just have to configure it becomes complicatedpour la correction du lit ç OK g32c ok
Les détails me manquent et chario je dois juste configurer ça devient compliqué -
@neetspeed If E1 is going the wrong way, change direction with M569 P4 'S' parameter.
For the Markforged kinematics, can you post a diagram of your belt layout? You say that it is CoreXY + Markforge U, is that correct? Or do you have two motors for U and V, like a second CoreXY?
If you are running CoreXYUV, use M669 K8. See https://duet3d.dozuki.com/Wiki/Gcode#Section_M669_Set_kinematics_type_and_kinematics_parameters
If you are running CoreXY + Markforge U, you have to work out the transformation matrix. This is how one axis moving affects the others. It's also M669, but with additional parameters for X, Y and U. To do this, you need to work out how each axis moves when the others move. X and Y should be the same as a normal CoreXY, but with an additional value for U. Send M669 to see the current matrix; in CoreXY mode, I get (I have added the comments):
Kinematics is CoreXY, matrix: 1.00 1.00 0 ; This how X, Y and Z motors move when there is a positive X move 1.00 -1.00 0 ; This how X, Y and Z motors move when there is a positive Y move 0 0 1.00 ; This how X, Y and Z motors move when there is a positive Z moveU needs to move when X and Y move. It will probably be something like:
1.00 1.00 0 0 ; This how X, Y, U and Z motors move when there is a positive X move 1.00 -1.00 -1.00 0 ; This how X, Y, U and Z motors move when there is a positive Y move 0 0 1.00 0 ; This how X, Y, U and Z motors move when there is a positive U move 0 0 0 1.00 ; This how X, Y, U and Z motors move when there is a positive Z moveA positive X move shouldn't move the U axis (even though the X and Y motors move). A positive Y move will make the U axis move positively (but may move negatively, so check), so needs -1 to counteract this. A positive U move shouldn't move X or Y. However, this is just a guess! You have the machine in front of you, so should be able to work this out.
This would give an M669 command like:
M669 X1:1:0:0 Y1:-1:-1:0 U0:0:1:0 Z0:0:0:1
Which would replace the one in your config.g.Seeing a picture of your belt setup would help, but I think this is close.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
hi guys
thank you ,
I have exactly this kinematics of belt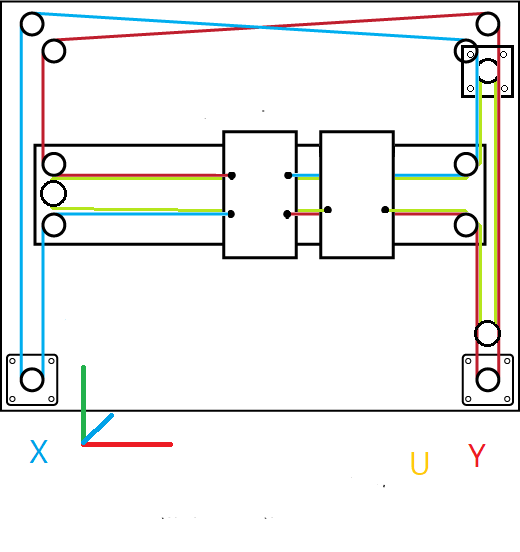
my corexy
m669
kinematics is CoreXY, matrix:
1.00 1.00 0
1.00 -1.00 0
0 0 1.00my first chario, stop 9.5 mm before the charion U, which has the same dimensions as x in mirror, finally I suppose
and I'm not M669, I have M667 S1
salut les gars
Merci ,
J'ai exactement cette cinématique de ceinturemon corexy
m669
la cinématique est CoreXY, matrice:
1,00 1,00 0
1,00 -1,00 0
0 0 1,00mon premier chario, arrêtez-vous à 9,5 mm avant le charion U, qui a les mêmes dimensions que x dans le miroir, enfin je suppose
et je ne suis pas M669, j'ai M667 S1

-
This post is deleted! -
@droftarts said in Rat rig v-core pro COREXYU:
This would give an M669 command like:
M669 X1:1:0:0 Y1:-1:-1:0 U0:0:1:0 Z0:0:0:1
Which would replace the one in your config.g.That looks correct to me except that the U motor values should come after the Z motor values, not before. If you also put parameter K1 in that command it will be this:
M669 K1 X1:1:0:0 Y1:-1:0:-1 U0:0:0:1 Z0:0:1:0then it can replace your M667 command.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@neetspeed, in case you didn't notice, I just corrected my previous reply.
-
@dc42 said in Rat rig v-core pro COREXYU:
M669 K1 X1:1:0:0 Y1
 0:-1 U0:0:0:1 Z0:0:1:0
0:-1 U0:0:0:1 Z0:0:1:0I saw the correct version
")
thank you dc42 really
Y, lost half his speed,
but the movement XY works it is necessary I create the axis U
-
Yes you need to create the U axis using the M584 command. https://duet3d.dozuki.com/Wiki/Gcode#Section_M584_Set_drive_mapping
-
speed will recover?
-
@neetspeed said in Rat rig v-core pro COREXYU:
speed will recover?
I don't know why the speed has changed. When you have added the U axis in M584, please post your config.g file.
-
error G28 I dig
config (3).gG28 U
Error: Bad command: '' 'Accueil U en haut de l'axe' ''
Error: G0/G1: insufficient axes homed -
@neetspeed Have you added homing of U to homeall.g, and/or created homeu.g? Or, for now, set the U axis position with G92 U[postition], eg
G92 U100.Ian
-
@neetspeed
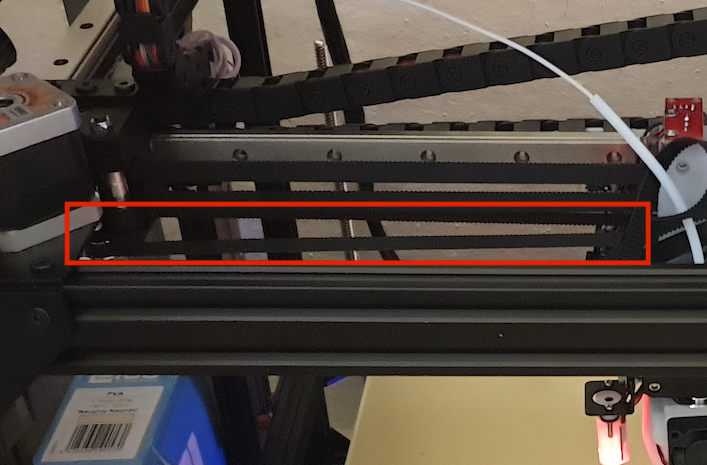
These two belts do not look parallel. I think they are for the CoreXY carriage. This will cause the belt to get tighter as the carriage moves left, and will create LOTS of problems. Belt paths MUST be straight, and at 90º. The only place where they don't have to be straight is at the back, where the X and Y belt cross, like your picture earlier:

Ian
-
no c the U belt
temporary for the moment but x goes first and does not bother thanks -
-
@neetspeed From your config.g this is wrong:
M584 X0 Y1 Z2:4 E3 U3 E4:; deux moteurs Z connectés aux sorties pilote Z et E1You have E3 and U3 using the same driver, Z4 and E4 using same driver, and E4: expects another driver! Where are U axis and the two Extruder axes connected?
c well E8,
for driver 4 of the duex?What do you mean? You want to connect second E to driver 4 of Duex? See here for Duex wiring diagram: https://duet3d.dozuki.com/Wiki/Duex_wiring_diagrams
Remember to define motors with M569. Perhaps try:
M569 P5 S1 ; physical drive 5 goes backwards, E2 on Duex M569 P6 S1 ; physical drive 6 goes backwards, E3 on Duex M569 P7 S1 ; physical drive 7 goes backwards, E4 on Duex M569 P8 S1 ; physical drive 8 goes backwards, E5 on Duex M569 P9 S1 ; physical drive 9 goes backwards, E6 on Duex M584 X0 Y1 Z2:4 U3 E5:6 ; Extruders on Duex E2 and E3Ian