Big cartesian IDEX printer - motor dilemma.
-
Hi,
I'm building full metal IDEX Cartesian printer - all parts milled.
Build volume will be 510x510x700mm.
Will use Duet 3 with toolboards. Love the idea - only 3 thin wires and 2 power wires.Bed will be kinetically coupled with three independent z motors.
Want to archive non print moves about 400-500mm/s.
It's not easy task, but making rigid frame and wide gates belts i think i can do that.
In my actual small Cartesian i can easily archive 450mm/s as non print moves. Only flaw of this is that i must from time to time change belts. But it's working.But i got dilemma with right motor for Y axis.
I was thinking about NEMA23, but regarding motor inertia it could be problematic.Here's my first version of new printer. Don't take seriously some ideas. It's some kind of idea, but as usual in my case over complicated.

Most important here Y axis. As you see, I'm planing use here 2 12mm Gates_LL belts and one NEMA23.
But reading some post on this forum, i see that with NEMA23 it will be problematic to archive such speeds.
I'm thinking about Nema17, but I'm little afraid that it will handle it.
Have you ideas how solve that problem ? -
what about using 2 y nema 17 motors? one for each side?
-
@bartwaw said in Big cartesian IDEX printer - motor dilemma.:
Hi,
I'm building full metal IDEX Cartesian printer - all parts milled.
Build volume will be 510x510x700mm.
Will use Duet 3 with toolboards. Love the idea - only 3 thin wires and 2 power wires.Bed will be kinetically coupled with three independent z motors.
Want to archive non print moves about 400-500mm/s.
It's not easy task, but making rigid frame and wide gates belts i think i can do that.
In my actual small Cartesian i can easily archive 450mm/s as non print moves. Only flaw of this is that i must from time to time change belts. But it's working.But i got dilemma with right motor for Y axis.
I was thinking about NEMA23, but regarding motor inertia it could be problematic.Here's my first version of new printer. Don't take seriously some ideas. It's some kind of idea, but as usual in my case over complicated.
Most important here Y axis. As you see, I'm planing use here 2 12mm Gates_LL belts and one NEMA23.
But reading some post on this forum, i see that with NEMA23 it will be problematic to archive such speeds.
I'm thinking about Nema17, but I'm little afraid that it will handle it.
Have you ideas how solve that problem ?Without doing any math - I think you could potentially get up there - achieve 400-500mm/s with sufficient torque for the shared gantry.
I'm running a Duet2 WiFi + Duex5 on my IDEX machine, so I was a little limited as far as what Nema23 I could select for my Y gantry - I wanted high torque, but also highish speed (300mm/s).
Motor I selected: https://catalog.orientalmotor.com/item/2-phase-bipolar-stepper-motors/60mm-pkp-series-2-phase-bipolar-stepper-motors/pkp264d28a2
The key there being the rated amperage (2.8A/phase) as well as low inductance.
Here are some of my calculations I did to verify if the motor would work for my purposes - important to note the back-emf calculations.

My setup - 2.25:1 gear ratio on the Y-axis, a respectable 96 steps/mm. 20tooth MR3 pulley on the stepper, to a 45tooth MR3 pulley on the Y-axis shaft, down to 25mm pulleys on either end of the shaft - 3mm belt pitch.
For accelerations:
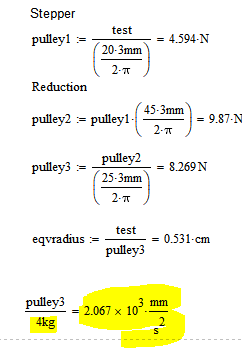
I actually run it at 4000mm/s^2 as the gantry isn't 4kg (yet).
The key is to really sit and calculate it out - find a bunch of reputable motors, determine a target steps/mm, determine your gantry weight, and make sure you are aware of what belts and pulley options you have. Make sure you follow along with the calculations listed here (substitute the correct Vin for Duet3):https://duet3d.dozuki.com/Wiki/Choosing_and_connecting_stepper_motors
FWIW, travels at 300mm/s with sufficient acceleration is quite zippy. Speeds of 300-500mm/s are worthless if you're running at, say 1000mm/s^2, as any travel move will maybe only reach 100mm/s, interior printed line segments won't reach target speeds unless they are sufficiently large.
Another (unrelated) sugestions - make sure you leave plenty of parking space for the two heads (build plate clearance!)- I made my buildplate too large, and sort of designed myself into a corner as far as tool cleaning goes.