Duet II Ethernet steppers not moving
-
okay long story - short version
was all working fine on RR3, had to send out to to builder to have rewired and new hotend mount for bltouch.came back all rewired, sdcard config blown away, new hotend mount w/ bltouch added
nothing worked

this is a cartesian printer it has dual Z screws, dual Y mgn12, single X mgn12, single extruder
Dual Z is wired to Z and E1, both Y are wired to Y (they spliced the cable), X is of course X, E0 is E0nothing moves when i try to home all....... it acts like its working in the gui, but the motors move nothing.
i reset the config, updated to newest RR3
cat config.g
; Configuration file for Duet WiFi (firmware version 3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.2.2 on Mon Feb 08 2021 15:04:40 GMT+0700 (Indochina Time); General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"BEAST" ; set printer name; Network
M552 P0.0.0.0 S1 ; enable network and acquire dynamic address via DHCP
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S1 ; enable Telnet; Drives
M569 P0 S1 ; physical drive 0 goes forwards
M569 P1 S1 ; physical drive 1 goes forwards
M569 P2 S1 ; physical drive 2 goes forwards
M569 P3 S1 ; physical drive 3 goes forwards
M569 P4 S1 ; physical drive 4 goes forwards
M584 X0 Y1 Z2:4 E3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z800.00 E420.00 ; set steps per mm
M566 X900.00 Y900.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z20.00 E250.00 ; set accelerations (mm/s^2)
M906 X800 Y800 Z800 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X400 Y400 Z400 S0 ; set axis maxima; Endstops
M574 X1 S1 P"xstop" ; configure active-high endstop for low end on X via pin xstop
M574 Y1 S1 P"ystop" ; configure active-high endstop for low end on Y via pin ystop
M574 Z1 S1 P"zstop" ; configure active-high endstop for low end on Z via pin zstop; Z-Probe
M950 S0 C"exp.heater3" ; create servo pin 0 for BLTouch
M558 P9 C"^zprobe.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X0 Y0 Z2.5 ; set Z probe trigger value, offset and trigger height
M557 X15:400 Y15:400 S20 ; define mesh grid; Heaters
M308 S0 P"bedtemp" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin bedtemp
M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0
M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M308 S1 P"e0temp" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin e0temp
M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S280 ; set temperature limit for heater 1 to 280C; Fans
M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off
M950 F1 C"fan1" Q500 ; create fan 1 on pin fan1 and set its frequency
M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on; Tools
M563 P0 D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C; Custom settings are not defined
; Miscellaneous
M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power lossand M122
m122
=== Diagnostics ===
RepRapFirmware for Duet 2 WiFi/Ethernet version 3.2 running on Duet Ethernet 1.02 or later
Board ID: 08DGM-917DA-G4MS4-6J9D4-3S46K-1TZMB
Used output buffers: 1 of 24 (10 max)
=== RTOS ===
Static ram: 23460
Dynamic ram: 68700 of which 40 recycled
Never used RAM 19880, free system stack 206 words
Tasks: NETWORK(ready,186) HEAT(blocked,311) MAIN(running,448) IDLE(ready,19)
Owned mutexes:
=== Platform ===
Last reset 00:00:37 ago, cause: power up
Last software reset at 2021-02-10 11:53, reason: User, GCodes spinning, available RAM 19844, slot 1
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0041f000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a
Error status: 0x00
Aux0 errors 0,0,0
MCU temperature: min 25.0, current 29.0, max 29.2
Supply voltage: min 24.0, current 24.1, max 24.2, under voltage events: 0, over voltage events: 0, power good: yes
Driver 0: position 0, standstill, SG min/max not available
Driver 1: position 0, standstill, SG min/max not available
Driver 2: position 0, standstill, SG min/max not available
Driver 3: position 0, standstill, SG min/max not available
Driver 4: position 0, standstill, SG min/max not available
Driver 5: position 0
Driver 6: position 0
Driver 7: position 0
Driver 8: position 0
Driver 9: position 0
Driver 10: position 0
Driver 11: position 0
Date/time: 2021-02-10 12:18:49
Cache data hit count 52588001
Slowest loop: 123.81ms; fastest: 0.20ms
I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0
=== Storage ===
Free file entries: 10
SD card 0 detected, interface speed: 20.0MBytes/sec
SD card longest read time 1.6ms, write time 0.0ms, max retries 0
=== Move ===
DMs created 83, maxWait 0ms, bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== AuxDDARing ===
Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters = 0 -1 -1 -1, chamberHeaters = -1 -1 -1 -1
=== GCodes ===
Segments left: 0
Movement lock held by null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
Daemon is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty.
=== Network ===
Slowest loop: 173.53ms; fastest: 0.02ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions
HTTP sessions: 1 of 8
Interface state active, link 100Mbps full duplex -
check the fuses
but if you paid someone to do it. he should look into it. -
welp fuses are fine, i checked the board 2 times, then noticed they had removed the jumpers for serial Z, ive replaced them since and now X and Z move fine, Y is being problematic, my guess is because they spliced the two Y motors to a single Y connector, but if the motors are on opposite sides of the frame one moves forwards and one should move back. neither move but now they at least make a sound.
-
@dingo007 said in Duet II Ethernet steppers not moving:
then noticed they had removed the jumpers for serial Z, ive replaced them since and now X and Z move fine, Y is being problematic, my guess is because they spliced the two Y motors to a single Y connector
why would they do that? just use the z connector.
-
@dingo007 said in Duet II Ethernet steppers not moving:
welp fuses are fine, i checked the board 2 times, then noticed they had removed the jumpers for serial Z, ive replaced them since and now X and Z move fine, Y is being problematic, my guess is because they spliced the two Y motors to a single Y connector, but if the motors are on opposite sides of the frame one moves forwards and one should move back. neither move but now they at least make a sound.
You need to find a new builder.
")
Frederick
-
@Veti yeah. nope... sorry never sending it back there again...! even i know better.
-
@dingo007 said in Duet II Ethernet steppers not moving:
@Veti yeah. nope... sorry never sending it back there again...! even i know better.
Well maybe they just wired the Y steppers wrong and they are fighting each other.
That should make quite a bit of noise though.
If you don't like the idea of driving both Y steppers together like that you could use an a pair of external drivers for Y or perhaps Z.
The Duet WiFi has connections available for that on the expansion connector.
I'm using two of these on a printer I am building and so far they are working very well.
Just a thought.
Frederick
-
@fcwilt said in Duet II Ethernet steppers not moving:
Well maybe they just wired the Y steppers wrong and they are fighting each other.
Yes they sound like marbles in a can now, have to figure out the wiring, seems one should go forward, one should go back, i tried reversing 2 wires on one of the motors, didnt seem to help
-
@dingo007 said in Duet II Ethernet steppers not moving:
@fcwilt said in Duet II Ethernet steppers not moving:
Well maybe they just wired the Y steppers wrong and they are fighting each other.
Yes they sound like marbles in a can now, have to figure out the wiring, seems one should go forward, one should go back, i tried reversing 2 wires on one of the motors, didnt seem to help
Separate them and determine the wiring needed for each stepper to move in the correct direction.
Then you can re-connect them both.
Frederick
-
@dingo007 It will also depend if they have wired the two Y motors in series, or parallel (which will need twice the motor current). They may have also mixed up the motor phases of each motor, and/or wired them so one motor goes the wrong direction.
I'd first separate the wiring and find the phase pairs: https://duet3d.dozuki.com/Wiki/Choosing_and_connecting_stepper_motors#Section_Identifying_the_stepper_motor_phases
Assuming motor phase pairs are black/green and red/blue (common, but there's no standard), then decide whether you wire them in parallel or series. We recommend series, though it's a bit more complicated to wire, there is even current distribution across motors, and you don't have to double the motor current.
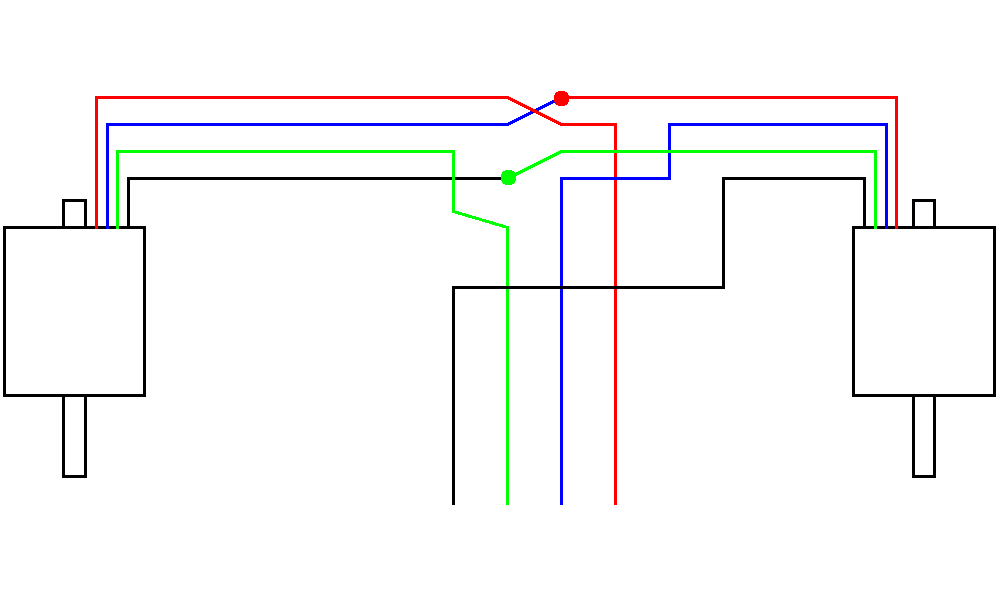
This wiring diagram should cause the motors to turn the same way. If you need them to go the opposite direction, switch one wire pair, eg from
Green > Motor 1 > Black > Green > Motor 2 > Black
to
Green > Motor 1 > Black > Black > Motor 2 > GreenIan
-
So im thinking at this point, Im going to use Z A/B for both motors on Y obviously with one running backwards, and use Y/E1 for the Z screws. just a matter of cutting the cable and adding a new lead for the second Y .....
-
@dingo007 Yupp thats resolved now... all motors working