BL touch setup help
-
I'm having trouble setting up a BL touch on my Duet wifi 2 board and Duex Board expansion. It won't respond to homing in the z axis and crashes into the bed. It also doesn't respond to commands like "M280 P0 S10 and M280 P0 S90 ". When i turn on the printer the BL touch deploys and retracts its trigger and then turns red. Here is the config file. I just want to make sure I set up the probes config portion correctly.
; Configuration file for Duet WiFi (firmware version 3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.1.10 on Sat Dec 12 2020 18:09:32 GMT-0500 (Eastern Standard Time) ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"Jumbo" ; set printer name ; Network M587 S"Drexel''s_Nest" P"drakasfam95" I10.0.0.36 M552 S1 ; enable network M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M584 X0 Y1:4 Z2:5:7:8 E3 ; set drive mapping M569 P0 S1 ; physical drive 0 goes forwards M569 P1 S1 ; physical drive 1 goes forwards M569 P2 S1 ; physical drive 2 goes FORwards M569 P3 S0 ; physical drive 3 goes forwards M569 P5 S0 ; physical drive 3 goes forwards M569 P7 S0 ; physical drive 3 goes forwards M569 P8 S0 ; physical drive 3 goes forwards M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X80.00 Y80.00 Z2000.00 E100.00 ; set steps per mm M566 X900.00 Y900.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z20.00 E250.00 ; set accelerations (mm/s^2) M906 X800 Y800 Z800 E800 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X900 Y900 Z900 S0 ; set axis maxima ; Endstops M574 X1 S1 P"xstop" ; configure active-high endstop for low end on X via pin xstop M574 Y1 S1 P"ystop" ; configure active-high endstop for low end on Y via pin ystop M574 Z1 S2 ; configure Z-probe endstop for low end on Z ; Z-Probe ; new probe bl touch M558 P9 C"^zprobe.in" H5 F100 T2000 M950 S0 C"duex.pwm1" G31 X20 Y0 Z3.3 P25 M557 X15:215 Y15:195 S20 ; define mesh grid ; Heaters M140 H-1 ; disable heated bed (overrides default heater mapping) M308 S0 P"e0temp" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin e0temp M950 H0 C"e0heat" T0 ; create nozzle heater output on e0heat and map it to sensor 0 M307 H0 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit M143 H0 S260 ; set temperature limit for heater 0 to 260C ; Fans ; Tools M563 P0 D0 H0 S"Main" ; define tool 1 G10 P0 X0 Y0 Z0 ; set tool 1 axis offsets G10 P0 R0 S0 ; set initial tool 1 active and standby temperatures to 0C ; Custom settings are not defined ; Miscellaneous M501 ; load saved parameters from non-volatile memory M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss -
@drak
I'm using heater7; Z-Probe M558 P9 C"^zprobe.in" H2 F100 T8000 A5 ; set Z probe type to bltouch and the dive height + speeds M950 S0 C"exp.heater7" ; create servo pin 0 for BLTouch G31 P500 X 57.5 Y-10.5 Z 1.6 ; set Z probe trigger value, offset and trigger height 1.7 M557 X65:275 Y50:290 S30 ; define mesh grid .. 30 , 60 , 80 -
Your BLT config looks fine.
Please post the results of M115 and a picture of the wiring.If the probe is not extending and retracting when the commands are issued, I would suspect wiring.
-
@paulhew
M115 results:

I did solder wires to extend the BL Touch cables but i checked the continuity with a multimeter and everything seemed to be okay.
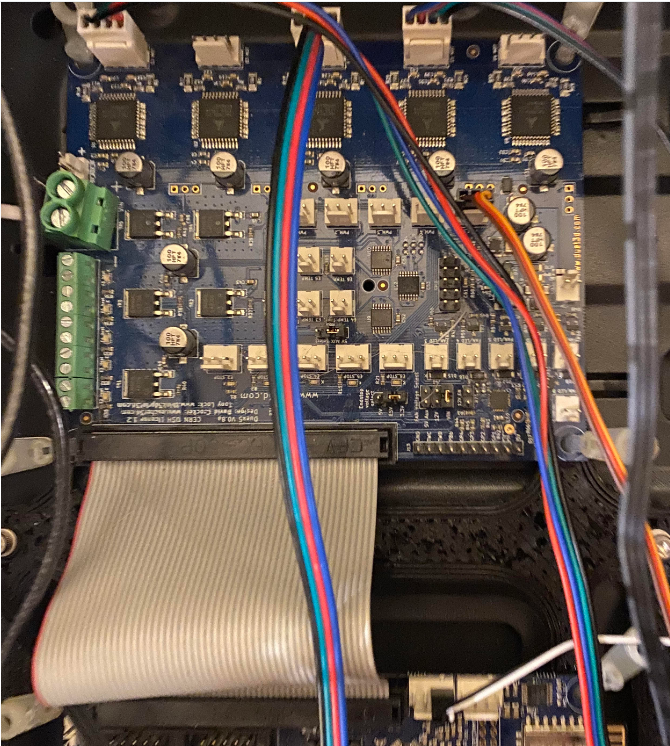
Here is a picture of the wiring
-
@drak you have it plugged into duex.pwm5, not duex.pwm1. See the wiring diagram here:
https://duet3d.dozuki.com/Wiki/Duex_wiring_diagrams
Either plug it in to duex.pwm1, or change config.g toM950 S0 C"duex.pwm5"Ian
-
Looks like you're on 3.1.1, should probably update the firmware to 3.2.2