heating pad 220 volt
-
Hi there
I have mounted the heating pad under the aluminium bed (620x620x4mm). It's a 1200 watt, 220 volt pad, powered by a relay (with a 24 volt coil) driven by the "heated bed" contacts on the Duet2 wifi board.
I tuned it to a temperature of 45°C as I currently have a normal glass plate that may not hold up to 60°C.
It seems to work... but I can hear the relay being activated/deactivated all the time and would like to avoid damage.
Is there any way I can operate it in a less 'wobbly' way?
I attach the config.g file:
; Communication and general M111 S0 ; Debug off M550 P"Quadra 600" ; Machine name and Netbios name (can be anything you like) ;*** Networking M552 S1 ; Turn network on M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet M555 P2 ; Set output to look like Marlin G21 ; Work in millimetres G90 ; Send absolute coordinates... M83 ; ...but relative extruder moves ; Drives M569 P0 S0 ; X Axis - physical drive 0 goes forwards M569 P1 S0 ; Y Axis - physical drive 1 goes forwards M569 P3 S0 ; Extrusor - physical drive 3 goes forwards M569 P5 S0 ; Z1 Axis - physical drive 5 goes forwards M569 P6 S0 ; Z2 Axis - physical drive 6 goes forwards M569 P7 S0 ; Z3 Axis - physical drive 7 goes forwards M569 P8 S0 ; Z4 Axis - physical drive 8 goes forwards M584 X0 Y1 Z5:6:7:8 E3 ; set drive mapping M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X80 Y80.00 Z800.00 E102.16 ; set steps per mm ;Default M203 X6000 Y6000 Z300 E1200 I30 M203 X18000 Y18000 Z900 E1200 ; set maximum speeds (mm/min) ;Default M201 X500 Y500 Z20 E250 M201 X1250 Y1250 Z20 E2000 ; set accelerations (mm/s^2) ;Default M566 X900 Y900 Z12 E120 P0 M566 X900.00 Y900.00 Z12.00 E120.00 ; set maximum instantaneous speed changes (mm/min) M906 X1275 Y1875 Z1875 E1275 I30 ; set motor currents (mA) and motor idle factor in per cent (60-90% of nominal current) M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X602 Y602 Z605 S0 ; set axis maxima ; Endstops M574 X1 S1 P"xstop" ; configure active-high endstop for low end on X via pin xstop M574 Y1 S1 P"ystop" ; configure active-high endstop for low end on Y via pin ystop M574 Z1 S1 P"duex.e2stop+duex.e3stop+duex.e4stop+duex.e5stop" ; configure active-high endstop for low end on Z via pin duex.e2stop+duex.e3stop+duex.e4stop+duex.e5stop ;M574 Z1 S1 P"duex.e5stop" ; Emergency Stop M950 J1 C"!duex.e6stop" M581 P1 T0 C0 S0 ; Filament runout sensor M591 D0 P2 C"e0stop" S1 ; filament monitor connected to E0 endstop M669 K0 ; select Kinematics Y to react with X and Z ; ZProbe -- BL-Touch M558 P9 C"^zprobe.in" H5 F90 T10800 ;A10 S0.005 ; set Z probe type to bltouch and the dive height + speeds probe up to 5 times until 2 consecutive readings are within 0.005, if none average of 5M307 H3 A-1 C-1 D-1 M950 S0 C"duex.pwm5" ; create servo pin 0 for BLTouch G31 P25 X-25 Y-70 Z2.7 ;Z2.656 ; set Z probe trigger value, offset and trigger height M557 X1:601 Y1:602 S26:35 ; define mesh grid M671 X-115:-115:715:715 Y130:470:470:130 s2 ; Z leadscrews are at Z2 (-115.130) Z2 (-115.470), Z3 (715.470), Z4 (715.130) ; Bed Heaters M308 S0 P"bedtemp" Y"thermistor" T100000 B4092 ; configure sensor 0 as thermistor on pin bedtemp M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0 ;M307 H0 B0 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit M307 H0 R0.420 C563.0 D4.59 S1.00 B0 M140 H0 ; map heated bed to heater 0 M143 H0 S120 ; set temperature limit for heater 0 to 120C ;M140 H-1 ; disable heated bed (overrides default heater mapping) ; Extruder Heaters M308 S1 P"e0temp" Y"thermistor" T100000 B4092 ; A"MK8" ; configure sensor 1 as thermistor on pin e0temp M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1 ;M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit M307 H1 R2.084 C273.4 D13.20 S1.00 V24.2 M143 H1 S280 ; set temperature limit for heater 1 to 280C ; Fans M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off M950 F1 C"fan1" Q500 ; create fan 1 on pin fan1 and set its frequency M106 P1 S1 H T45 ; set fan 1 value. Thermostatic control is turned on ; Tools M563 P0 D0 H1 F0 S"Estrusore MK8" ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C ; Miscellaneous M575 P1 S1 B57600 ; enable support for PanelDue M18 Z E0 M208 S1 Z-0.2 T0 -
Don't use a mechanical relay, use a zero crossing DC-AC SSR. This will also allow you to use PID control for the bed heater.
A normal glass plate will handle high temperatures as long as there is a heat spreader (e.g. aluminium sheet) between the heater and the glass. Bonding the heater directly to the glass is not advisable, but if you do then use borosilicate glass.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
Ok for relay.
This is my bed
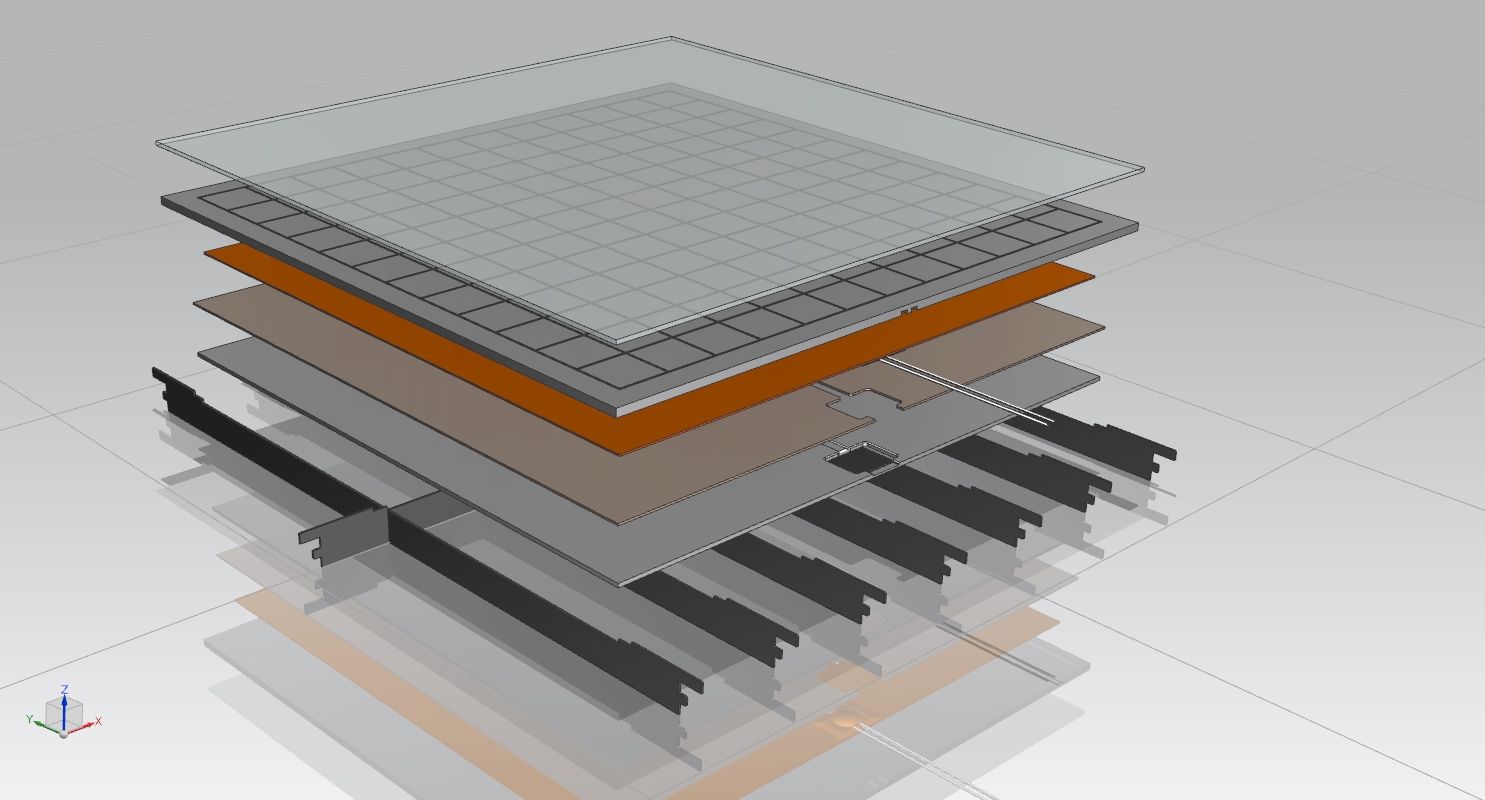
glass
4 mm aluminium plate
heating pad
thermal/electric insulation (mica)
support surface
support grid structure -
@bernardomattiucci, that looks good. I think your glass will be OK up to at least 100C, as long as you don't spill cold water on it while it it hot. I've had my 4mm glass bed on top of 5mm aluminum up to 120C.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 then,
I fitted the "zero crossing DC-AC SSR" instead of the relay and it seems to work.The glass I'm using is very normal window glass... and I've been advised against exceeding 50°C. As soon as I have a chance I would like to put a borosilicate glass or tempered glass top... I don't know which of the 2 is better in terms of material adhesion (mostly PLA). Any advice?
Which command should I give to do autotuning (I can't remember which one I used....
 )
) -
@bernardomattiucci I use for PLA both, borosilicate glass and normal "mirror glass". I have no problems with adhesion...
-
Regular float glass is fine as long as you don't shock it. I use 100C all the time without issues.