Maximum jerk and acceleration values?
-
Is the maximum jerk and acceleration values only limited by the step rate of the Duet board being used?
I can't find a maximum value in the documentation, but there is a maximum jerk value of 1200 mm/min listed in the configurator. However, the configurator is usually a couple version of RRF behind.
-
There don't seem to be limits beyond precision of numerical representation. The maximum jerk value in the configurator seems to be a conservative upper bound for real world machines.
A cursory look at the source code seems to imply there are no practical limits to acceleration (
Movement/DriveMovement.hhas acceleration as afloat, so 3.40282e+038A quick practical test on an STM32F407 based board shows that very high, i.e. unreasonable numbers run into precision issues:
M204 P999999999999999999 M204 Maximum printing acceleration 999999984306749440, maximum travel acceleration 20000.0 mm/sec^2Setting print acceleration to 10,000,000,000 I still get the right values back.
Jerk was a bit harder to suss out (it's
InstantDVyou want to grep for), but also seems to be a float (derived from src/Configuration.h which sets default values). -
@oliof Thank you for your response. The max acceleration of my system is 1650mm/s. Any reason as to why I could not set the Jerk to its lowest value and then set my acceleration to this value?
-
@drdflo said in Maximum jerk and acceleration values?:
but there is a maximum jerk value of 1200 mm/min listed in the configurator.
Where is that seen?
-
@drdflo lowest possible jerk value is 0 which would mean a full stop at 90 degree turns before re-accelerating which I think is undesirable.
Acceleration is measured in mm/sec^2 -- is your value the maximum movement speed?
For me it was helpful to play around with the RepRap Calculator for Acceleration to figure out the relationship between acceleration (and deceleration!) and target movement speed.
Consider this example: Acceleration a high but not unattainable 20,000mm/sec^2, target speed 1650mm/sec, and a linear move of 200mm/sec
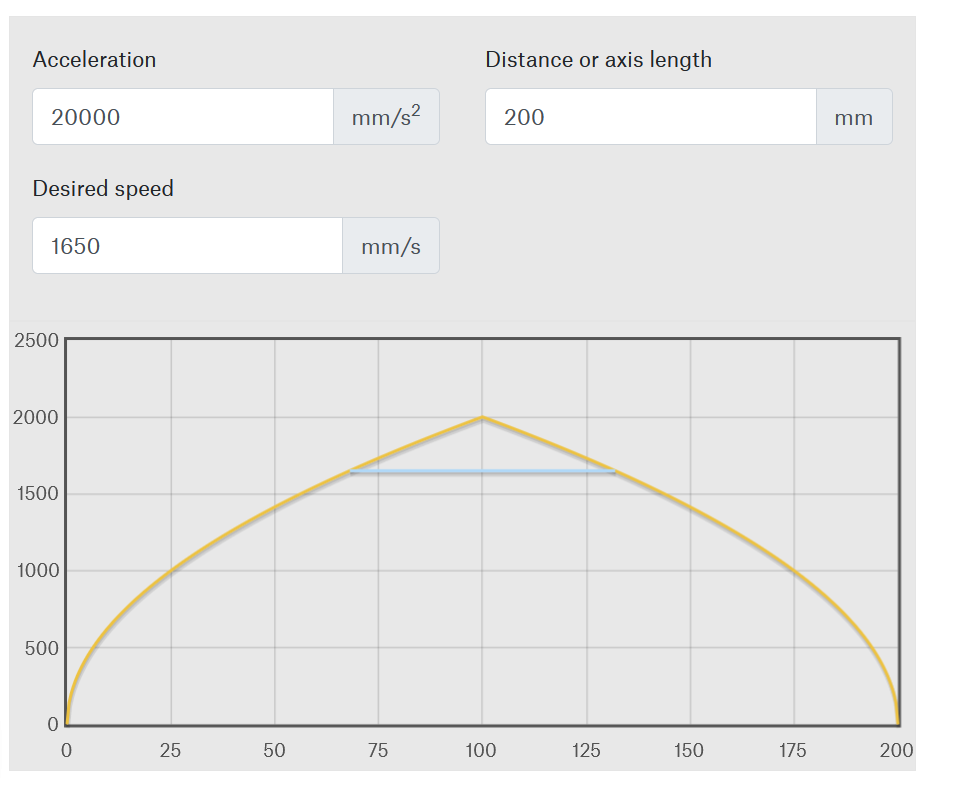 .
. -
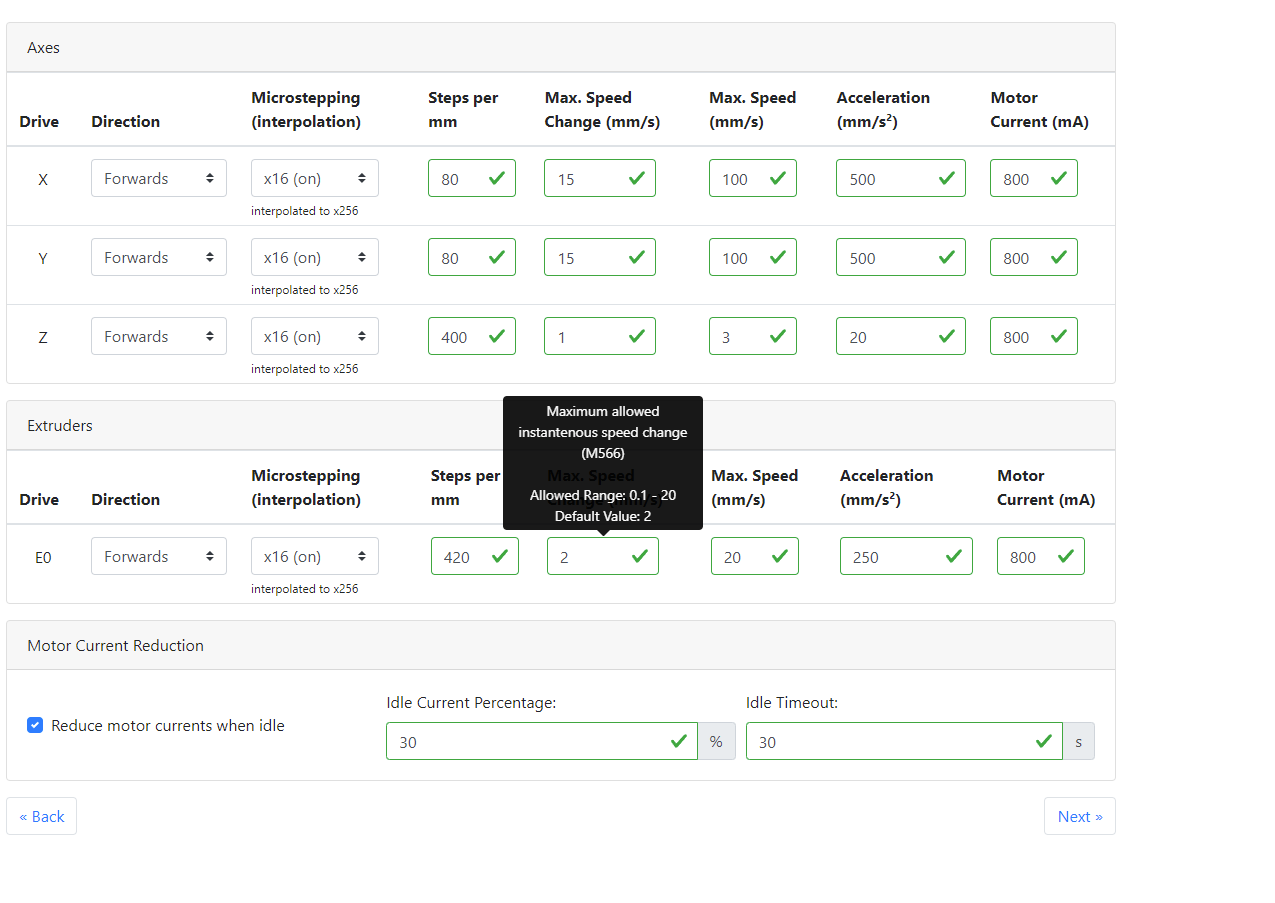
@Phaedrux - See the below picture. If you hover over maximum allowed speed change a tip box appears with an allowed range: 0.1 - 20mm/s
@oliof This question is actually in regard to an earlier forum post, where I am controlling mirror galvanometers with the step pulses output by the expansion header of a duet wifi. I had to simplify the original post by getting right to my question here. The maximum speed of a galvanometer is given in volts per second, which of course corresponds to the angle of the mirror. I am unable to find a maximum acceleration value for galvanometers. For the purpose of this question I converted the rate at which the angle is changing to surface speed of the laser rastering. That 150V/s corresponds to 1650mm/s. In my reply I accidentally confused myself by saying acceleration when I meant velocity. If I set my acceleration to 1650 mm/s then the system won't be able to go over that 150V/s limit - at least that is my thought.
-
@drdflo then you want to set the maximum feedrate to 99,000 (1650x60, RRF uses mm/min here). If you then set jerk to the same value you will be able to make instantaneous changes within the speed limit -- no idea if galvos can do that.
I have no idea about galvos other than "whee flippy mirrors!" so I don't know what jerk or acceleration settings would be appropriate.
-
Jerk does influence the effectiveness of input shaper. In Klipper it’s recommended to not go over 4 mm/s. The Duet documentation does not state absolute numbers but I recall that it’s also recommended to stay as low as possible so the shaper work effectively.
The max acceleration is influenced by the weight of your print head, axis etc and geometry in general. With CoreXY you tend to have higher acceleration limits without causing too much ringing. -
@argo I don't think Input Shaping will be relevant for galvos.
-
Well if you try to maximise acceleration and print speeds it should be considered imo.
-
@Argo DrDFlo is talking about tiny mirrors being positioned to put lasers in the right position. They aren't accelerated and moved and excited like a normal FDM print head where input shaping surely can help.
-
@drdflo said in Maximum jerk and acceleration values?:
@Phaedrux - See the below picture. If you hover over maximum allowed speed change a tip box appears with an allowed range: 0.1 - 20mm/s
@oliof This question is actually in regard to an earlier forum post, where I am controlling mirror galvanometers with the step pulses output by the expansion header of a duet wifi. I had to simplify the original post by getting right to my question here. The maximum speed of a galvanometer is given in volts per second, which of course corresponds to the angle of the mirror. I am unable to find a maximum acceleration value for galvanometers. For the purpose of this question I converted the rate at which the angle is changing to surface speed of the laser rastering. That 150V/s corresponds to 1650mm/s. In my reply I accidentally confused myself by saying acceleration when I meant velocity. If I set my acceleration to 1650 mm/s then the system won't be able to go over that 150V/s limit - at least that is my thought.
So what you're seeing there for the jerk range is a reflection of the max speed for that axis which is 20mm/s.