How to check the real current of the stepper motor
-
@zapta hi was going to do a differentual measurment using 2 channels on the scope with a very small resistor in line e.g 0.01ohms
-
 undefined Phaedrux moved this topic from Beta Firmware
undefined Phaedrux moved this topic from Beta Firmware
-
@moth4017 said in How to check the real current of the stepper motor:
@zapta hi was going to do a differentual measurment using 2 channels on the scope with a very small resistor in line e.g 0.01ohms
I think that should work, assuming the scope's sensitivity and offset or good enough. You can use x1 probe since bandwidth is not an issue. I got recently an OWON HDS242s for similar applications since it's floats when running on battery. BTW, I just tried here the approach with a Amp meter and very slow movement and it seems to work. I got about 950ma DC max with RRF configured to 1200ma (?).
-
Here is a better macro for measuring current. Simplify connect a current meter in series to one of the stepper coils, turn on the printer, home, run the script, and observe how the current changes slowly between negative and positve max currents.
; Assuming x,y are homed. G1 X100 Y100 ; move to starting point M203 I1 ; allow slow movements G1 X103 F1 ; move both motors slowly, corexy version ; G1 X103 Y103 F1 ; cartesian version -
@zapta its ok used you first macro
M906 600 measured max 0.5179mA
M906 1000 Measured max 0.6414mAi tried to test the extruder but couldn't get to extrude for some reason
-
@moth4017 said in How to check the real current of the stepper motor:
@zapta its ok used you first macro
M906 600 measured max 0.5179mA
M906 1000 Measured max 0.6414mAi tried to test the extruder but couldn't get to extrude for some reason
values in Amps not mA
-
@moth4017 bear in mind that when the stepper driver is moving slowly, standstill current reduction will kick in.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
Thanks @dc42. A couple of questions if you don't mind. Having a simple technique to measure actual current would be very useful.
-
The code that @moth4017 used moves 0.001mm every 250ms. Will this kick in the standstill current?
-
What about the code below, will it kick in the standstill current?
G1 X100 Y100 ; move to starting point M203 I1 ; allow slow movements G1 X103 F1 ; move both motors slowly, corexy version- Any suggestion for a reliable way to measure the actual current using simple means?
-
-
@zapta on the TMC2209, standstill will kick in when the frequency of step pulses is less than approx. 12Hz. So the axis speed below which standstill current reduction kicks in depends on your steps/mm. For example, if you have 100 steps/mm, then 12Hz corresponds to 12/100 mm/sec = 0.12mm/sec = 7.2mm/min.
When measuring motor current you can use M917 to set the standstill current to 100% of the running current for a particular axis. At high currents, on the MB6HC and EXP3HC RRF will impose a maximum standstill current below 100%, but this doesn't apply to the Duet 3 Mini.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
Thanks @dc42. I updated the macro to disable standstill current reduction and am getting now very consistent current readings, peaking at ~1250ma with 1200ma configuration (good). This is with a Mini 5.
G1 X100 Y100 ; Starting location M203 I1 ; Allow very slow movements M917 X100 Y100 ; Disable standstill current reduction. G1 X103 F1 ; Move slowly. Moves both motors with coreXYI also ordered this +/-2A meter, may be more visual https://www.aliexpress.com/item/32400650799.html
-
@zapta
M1000 requested measures 0.8379A with you new script<
-
@zapta
ive deleted the macro that contained
; Move slowly to identify peak stepper current.
; Assuming XY are already homed.G90 ; absolute positioning
G1 X100, Y100 ; starting pointG91 ; relative positioning
while iterations < 500
echo "Iteration " ^ {iterations}
;G1 X0.001 Y0.001 ; for cartesian printer
G1 X0.001 ; for core XY printer
G4 P250 ; Wait 250msG90 ; absolute positioning
but it is still continuously running , where would it be hiding so i can stop it
")
-
@moth4017 said in How to check the real current of the stepper motor:
but it is still continuously running , where would it be hiding so i can stop it
It should stop after a minute or two. What I do is pressing on the red STOP button on PanelDue or DWC to reset the machine. This also resets any configuration changes the script may do.
-
@moth4017 said in How to check the real current of the stepper motor:
M1000 requested measures 0.8379A with you new script
I guess it's now a question to the Duet team, is this a reliable measurement and is the result within the expected range.
-
@zapta I would expect it to be closer than that, it should be less than 10% out.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 so where does this leave us? is it lower that it should be or within acceptable parameter's
-
@moth4017 i tried the current measure on the extruder not using the script but setting the extrude speed to 0.001mm/s the highest reading i got was 0.1347A
m906
Motor current (mA) - X:1000, Y:1000, Z:600, E:1200, idle factor 30%
PM M913
Motor current % of normal - X:100, Y:100, Z:100, E:100 -
@moth4017, as reported in a previous post, I got X current that seems to be in range so I am trying to identify differences from your configuration.
-
I was measuring an X current on a motor that is connected to the daughter board. [theoretically it should behave exactly like a main board driver since it has direct connection]
-
This is by firmware configuration. It's an older firmware version than yours.
RepRapFirmware for Duet 3 Mini 5+ version 3.4.0beta5 (2021-10-12 13:53:24) running on Duet 3 Mini5plus WiFi (standalone mode)
Board ID: A0L0Y-5296U-D65J0-40KMN-0W03Z-HBTQS- [long shot in the dark] The Mini 5 uses on board current sense resistors so theoretically if the value is in connect or a connection is not good, it may increase the actual current without the drive being aware of it.
Not sure if it helps.
")
-
-
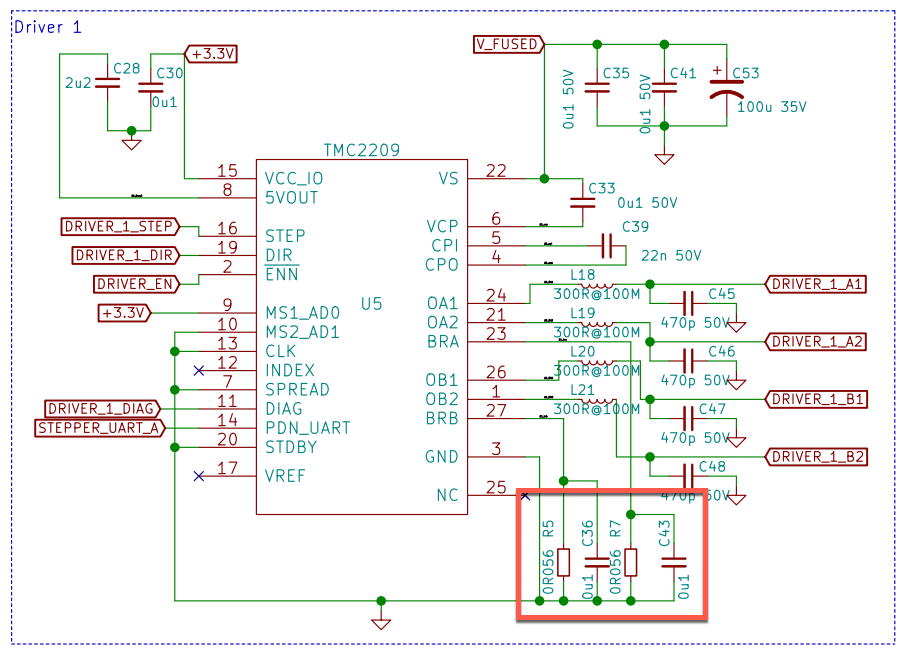
@zapta i notie there is a vref on the tmc do you know if this value changes when controlled by the miro ,
-
@moth4017, I am not an expert, but you can try searching the driver's datasheet for 'vref' and 'sense' and see if it helps. It's a smart chip so there are all kind of programming options for the RRF firmware to use.
https://www.trinamic.com/fileadmin/assets/Products/ICs_Documents/TMC2209_Datasheet_V103.pdf
The schematic of the Mini 5 suggests that it uses 56 milliohms resistors for sensing the coil currents.
-
@zapta correct, the sense resistor is 0.056 ohms.
There are a few factors that may cause the current to be inaccurate:
- The internal resistance of the BRA and BRB pins needs to be taken into account. We assume this is 0.02 ohms, as specified on the datasheet.
- The driver reference voltage has a tolerance of +/- 5%
- The current will be rounded to the nearest multiple of approx. 74mA, usually down (up only if the next multiple is really close). This means that if you set 1000mA then the current setting requested from the driver will be 962mA.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com