I could use some help
-
@fcwilt it truly is a magic borne of human ingenuity.
The motors didn’t show up today. Bummer. I’m hope for mail on Sunday now.
So could you talk about 24volts versus 12 volts. I know the change would cost me, but what are the hardcore benefits?
Mac
-
@mac said in I could use some help:
@fcwilt it truly is a magic borne of human ingenuity.
The motors didn’t show up today. Bummer. I’m hope for mail on Sunday now.
So could you talk about 24volts versus 12 volts. I know the change would cost me, but what are the hardcore benefits?
Mac
I already addressed that question in my post of 30th June. Scroll up and read the last bit again. Essentially you could get more torque out of the motors and use more powerful heaters. But if 12V gives you enough torque and enough heater power for your printer, you'll not see any benefit.
-
@fcwilt the motors arrived at 8:55 PM.
What, exactly, does RRF want to know about these motors?
What line of the config.g file needs to be edited, and how should it appear with the correct info?
Mac
-
@mac Motor current is all. A good setting is about 85% of the rating. So around 1.2 to 1.3 amps (1200 to 1300 mA) for those motors which are rated at 1.5Amps.
-
@deckingman just finished installing them. It all went well.
-
@mac said in I could use some help:
@deckingman just finished installing them. It all went well.
Once you are ready to test the new steppers remember to:
- execute M564 H0 S0 so you can jog each axis without homing or worrying about axis limits.
- use the jog buttons to verify each axis is moving in the correct direction
In the homing code I posted for you there was an absolute move at the end of each file.
Comment those absolute moves out for now, until we know the homing moves are working.
Frederick
-
@fcwilt my clock says 10:45; I've been up since 2 AM.
I just plugged the power into the machine.
My plan is to use RRF to tell the config.g file about these new motors. I'm still UNCLEAR as to what I should tell it. I'm also unclear about how to code it.
You referred to some code you wrote? Recently, or before?
I'm going to take this one step at a time, and try not to jump forwards without knowing where I'm going.
Mac
-
@mac There is an old adage which goes something like, "catch a man a fish and he'll feed himself for a day, but teach a man how to catch fish and he'll feed himself for life". Now I'm not trying to be disrespectful in any way, and I'll continue to help when I can, but if we carry on like this, you will have an endless list of questions and especially with the time differences due to geographic locations, you are going to have to wait for the answers. That's only going to add to your frustrations.
I'd like to teach you how to fish rather than keep feeing you now and then. So might I respectfully suggest, that you start looking at the documentation https://docs.duet3d.com/. Ian ( @droftarts ) has put a lot of time and effort into it and it really is very user friendly. Just start typing something in the search box at the top (e.g. "stepper motors") and it'll return a host a relevant topics which in turn will give you the information you need - often with actual code examples.
If you get used to doing this, you'll find you get all the answers you need much more quickly. Of course, we fellow users are on the whole a friendly bunch and we'll continue to help as a when our commitments allow. But we only know what we know from reading the documentation (and asking the odd question now and again).
-
@mac Okay, I found the "code." (It was back at 510.)
First, I feel like I have to tell my config.g that these new motors are X, where X is 1.2 - 1.3 amps / 1200 - 1300 mA.
I just set all the the motors to 1200 mA.
NOTE: I keep looking at the Z motor / Steps per mm; it's set at 4000? The Max. Speed Change (mm/s) is set at 1, the Max. Speed (mm/s) is set at 10, and the Acceleration (mm/s-squared) is set at 200? Is that right?
-
@deckingman thanks, contrary to what people believe, I do read the documentation. As for fishing, never caught a fish in my life, but my middle son was a commercial fisherman for 10 years? Fish is way too expensive for my budget.
-
@mac said in I could use some help:
NOTE: I keep looking at the Z motor / Steps per mm; it's set at 4000? The Max. Speed Change (mm/s) is set at 1, the Max. Speed (mm/s) is set at 10, and the Acceleration (mm/s-squared) is set at 200? Is that right?
Don't worry about most of those settings right now.
The only one of initial importance is the steps / mm.
It's easy enough to determine by testing what the value should be. Like before, you command a move of a known length, say, 50mm and measure with a ruler/scale how far it actually moved. From that you can determine the actual value or very close to it.
Frederick
-
@fcwilt I'll put that on the list of checks I'm making.
After I changed the information on the motors (from 600 mA to 1200 mA), and loaded a new config.g to DWC, surprise surprise, the "!^'s" are back on the endstops (05, 06, and 02).
I deleted them, and saved the config.g, and rebooted the machine.
All the motors are 1200 mA now, and the endstops are P"io5.in", P"io6.in" and P"io2.in".
That DO - something command that Ian suggested is gone. I'm going to put it back in (after I find in it in the thread).
Mac
-
@mac
; Drives M569 P0.0 D3 V0 S1 ; physical drive 0.0 goes forwards M569 P0.1 D3 V0 S1 ; physical drive 0.1 goes forwards M569 P0.2 D3 V0 S1 ; physical drive 0.2 goes forwards M569 P0.3 D3 V0 S1 ; physical drive 0.3 goes forwardsThe D3 V0 commands were suggested by Ian.
-
@mac Okay, TEST No. 1: M119 SEND.
Result: Endstops - X: not stopped, Y: not stopped, A: not stopped, Z probe: not stopped.
TEST No. 2: M119 SEND with each endstop depressed (one at a time).
Result: Endstops - X: at max stop, Y: not stopped, Z: not stopped, Z probe: not stopped.
Result: Endstop - X: not stopped, Y: at max stop, Z; not stopped, Z probe: not stopped.
Result: Endstops - X: not stopped, Y: not stopped, Z; at min stop, Z probe: not stopped.TEST No. 3: Execute M564 H0 S0 to jog each axis, are they going in the correct direction?
M564 H0 S0 executed.
Change to Dashboard.
All jog buttons are available.TEST X: I tried to jog right and left 10mm. Nothing happened.
TEST Y: I tried to jog Y-10. The bed shuddered in place.
TEST Z: I tried to jog Z-5 and Z+5. Z did not move.NOTE: I had to extend the X and Z endstops because I printed out a box for the board, and mounted it on the right Z rail. I don't know if this is possible, or not, but the wire I used to extend the endstops was slightly larger than the original wire.
There is also the possibility that the extensions are shorting out. I'll have to check that.
I'll also check the board to see if I made an error plugging the endstops in.
Given that the M119 tests worked, it seems like the endstops should be working?
RESULTS: X, Y, and Z failed to perform as expected.
TEST No. 4
G91 (sets relative movement, G1 H1 Y-10 F3600 what happens?
G1 H1 Y-10 F3600 SENT
RESULT: Bed shuddered in place.
At this point, I'm going to suspend the test.
Mac
-
@mac Here's my most recent config.g file.
; Configuration file for Duet 3 Mini 5+ (firmware version 3.3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.3.10 on Sun Jul 03 2022 11:18:04 GMT-0700 (Pacific Daylight Time) ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"Frankenstein's Cinderella" ; set printer name ; Network M552 S1 ; enable network M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0.0 D3 V0 S1 ; physical drive 0.0 goes forwards M569 P0.1 D3 V0 S1 ; physical drive 0.1 goes forwards M569 P0.2 D3 V0 S1 ; physical drive 0.2 goes forwards M569 P0.3 D3 V0 S1 ; physical drive 0.3 goes forwards M584 X0.0 Y0.1 Z0.2 E0.3 ; set drive mapping M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X80.00 Y80.00 Z4000.00 E420.00 ; set steps per mm M566 X900.00 Y900.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z600.00 E1200.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z200.00 E250.00 ; set accelerations (mm/s^2) M906 X1200 Y1200 Z1200 E1200 ; set motor currents (mA) M84 S0 ; Disable motor idle current reduction ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X220 Y220 Z240 S0 ; set axis maxima ; Endstops M574 X2 S1 P"io5.in" ; configure switch-type (e.g. microswitch) endstop for high end on X via pin !^io5.in M574 Y2 S1 P"io6.in" ; configure switch-type (e.g. microswitch) endstop for high end on Y via pin !^io6.in M574 Z1 S1 P"io2.in" ; configure switch-type (e.g. microswitch) endstop for low end on Z via pin !^io2.in ; Z-Probe M950 S0 C"io3.out" ; create servo pin 0 for BLTouch M558 P9 C"io3.in" H5 F120 T3600 ; set Z probe type to bltouch and the dive height + speeds G31 P500 X15.875 Y0.625 Z2.5 ; set Z probe trigger value, offset and trigger height M557 X5:190 Y5:215 S10 ; define mesh grid ; Heaters M308 S0 P"temp0" Y"thermistor" T100000 B4092 ; configure sensor 0 as thermistor on pin temp0 M950 H0 C"out0" T0 ; create bed heater output on out0 and map it to sensor 0 M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S33 ; set temperature limit for heater 0 to 33C M308 S1 P"temp1" Y"thermistor" T100000 B4092 ; configure sensor 1 as thermistor on pin temp1 M950 H1 C"out1" T1 ; create nozzle heater output on out1 and map it to sensor 1 M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit M143 H1 S100 ; set temperature limit for heater 1 to 100C ; Fans M950 F0 C"out3" Q500 ; create fan 0 on pin out3 and set its frequency M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off M950 F1 C"out4" Q500 ; create fan 1 on pin out4 and set its frequency M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on ; Tools M563 P0 S"optional" D0 H1 F0 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C ; Custom settings are not defined ; Miscellaneous M501 ; load saved parameters from non-volatile memory M911 S21 R23 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss -
@mac
; Endstops M574 X1 S1 P"io5.in" ; configure switch-type (e.g. microswitch) endstop for high end on X via pin !^io5.in M574 Y1 S1 P"io6.in" ; configure switch-type (e.g. microswitch) endstop for high end on Y via pin !^io6.in M574 Z1 S1 P"io2.in" ; configure switch-type (e.g. microswitch) endstop for low end on Z via pin !^io2.inThey were X2 and Y2 in the newest config.g.
I had nothing (I know of) to do with that change. I did research this thread, found Ian's and FcWilt's messages, and changed them to the above, however.
Mac
-
@mac well, I was really hoping that X2, Y2 Z1 code was the problem. I was hoping even more that X1, Y1, Z1 would allow me to jog the bed back 10 mm. No Such Luck. It shuddered in place for a brief moment, and that was that.

-
@mac I've been working on this machine since 2 AM. Putting the new motors in, putting the board in a box, and wiring everything together, putting the bed back together after I reinforced the mounting plate.
All for nothing.
-
@deckingman @droftarts @fcwilt
Here’s something completely different:

That antenna’s from one of my spare quadcopters that isn’t legal to fly anymore. I put it on the Duet Mini 5+ to see if it would work, and / or improve reception. In my opinion it improved reception a lot!
Mac
-
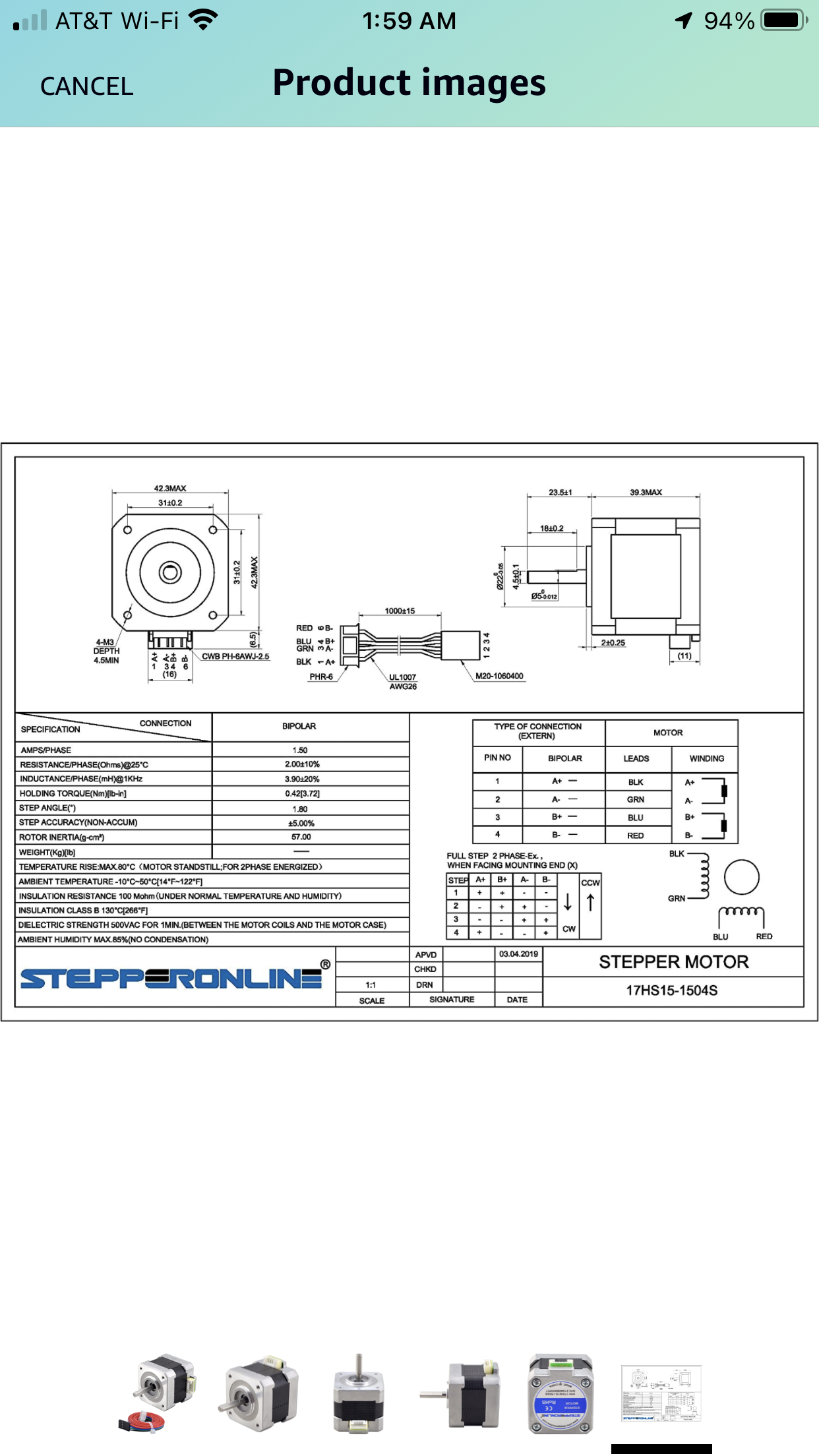
@mac sorry this change hasn’t gone to plan. Did you check the phases on the new motors? Can you take a picture of one of the new motors, of the wiring coming out, and the wiring of the Duet?
Your config looks sensible. You rewired the endstops to NC?
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth