-
Hi All,
I'm a real newbie on 3d printers and RepRap.
I am trying to setup a BLTouch on and ender3 and I get this error when the extruder is about to touch the bed:
G32 Error: Probe was not triggered during probing move; bed.g M561 ; clear any bed transform G29 ; probe the bed and enable compensatio; homez.g G91 ; relative positioning G1 H2 Z5 F6000 ; lift Z relative to current position G1 H1 Z-255 F1800 ; move Z down until the endstop is triggered G92 Z0 ; set Z position to axis minimum (you may want to adjust this); homeall.g ; called to home all axes G91 ; relative positioning G1 H2 Z5 F6000 ; lift Z relative to current position G1 H1 X-240 Y-240 F1800 ; move quickly to X and Y axis endstops and stop there (first pass) G1 H2 X5 Y5 F6000 ; go back a few mm G1 H1 X-240 Y-240 F360 ; move slowly to X and Y axis endstops once more (second pass) G1 H1 Z-255 F360 ; move Z down stopping at the endstop G90 ; absolute positioning G92 Z0 ; set Z position to axis minimum (you may want to adjust this); General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves ; Network M552 S0 M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0 S0 ; physical drive 0 goes forwards using default driver timings M569 P1 S0 ; physical drive 1 goes forwards using default driver timings M569 P2 S1 ; physical drive 2 goes forwards using default driver timings M569 P3 S0 ; physical drive 3 goes forwards using default driver timings M584 X0 Y1 Z2 E3 ; set drive mapping M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X80.00 Y80.00 Z400.00 E93.00 ; set steps per mm M566 X900.00 Y900.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min) M203 X12000.00 Y12000.00 Z600.00 E1200.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z20.00 E250.00 ; set accelerations (mm/s^2) M906 X580 Y580 Z580 E650 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X230 Y230 Z250 S0 ; set axis maxima ; Endstops M574 X1 S1 P"xstop" ; configure active-high endstop for low end on X via pin xstop M574 Y1 S1 P"ystop" ; configure active-high endstop for low end on Y via pin ystop M574 Z1 S1 P"zstop" ; configure active-high endstop for low end on Z via pin zstop ;M591 D0 P7 C"e0stop" S1 R50:130 L7.0 E10 ; BTT Smart Filament Sensor ;M591 D0 P1 S1 ; Filament runout Sensor ; Z-Probe Bltouch ;M950 S0 C"servo0" ; create servo pin 0 for BLTouch ;M558 P9 C"^probe" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds ;G31 P500 X-40 Y-10 Z2.95 ; set Z probe trigger value, offset and trigger height ;M557 X10:180 Y10:210 S40 ; define mesh grid ; Heaters M308 S0 P"bedtemp" Y"thermistor" T100000 B3950 ; configure sensor 0 as thermistor on pin bedtemp M950 H0 C"bed" T0 ; create bed heater output on bed and map it to sensor 0 M301 P21.73 I1.54 D76.55 ; disable bang-bang mode for the bed heater and set PWM limit ;M307 H0 R2 D65 B1 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit M307 H0 A0.425 C0.506 D2.82 S0.50 V0.0 B0 ; NEW M140 H0 ; map heated bed to heater 0 M143 H0 S150 ; set temperature limit for heater 0 to 150C M143 H0 S150 ; set temperature limit for heater 0 to 150C M308 S1 P"e0temp" Y"thermistor" T100000 B3950 ; configure sensor 1 as thermistor on pin e0temp M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1 M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit M143 H1 S300 ; set temperature limit for heater 1 to 300C ; Fans M950 F0 C"fan0" Q1000 ; create fan 0 on pin fan0 and set its frequency M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off M950 F1 C"fan1" Q1000 ; create fan 1 on pin fan1 and set its frequency M106 P1 S0 H1 T60 ; set fan 1 value. Thermostatic control is turned on ; Tools M563 P0 D0 H1 F0 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C ; Custom settings are not defined ; Miscellaneous ;M575 P1 S1 B57600 ; enable support for PanelDue M575 P1 S2 B57600 M552 S1 ; enable network M150 X2 T0 P0 ; jp M918 P1 E4 F1000000 ; BlTouch ; set Z probe type to bltouch and the dive height + speeds M558 P9 H5 F120 T6000 C"^probe" ; Setup Servo0 as servo port on SKR-RRF-E3 M950 S0 C"Servo0" G31 P550 X-40 Y-5 Z2.05 M557 X10:180 Y10:210 S40 ; Filament Sensor M591 D0 P1 S1 -
You need to use G30 to home your Z axis.
Replace these lines in your homez.g and homeall.g
G1 H1 Z-255 F1800 ; move Z down until the endstop is triggered
with
G30 -
I'm trying different G30 configuration but the head will go on the home position and hit multiple time the z switch and it will error again.
tried:
G30; G30 X50 Y50;; homez.g ; called to home the Z axis G91 ; relative positioning G1 H2 Z5 F6000 ; lift Z relative to current position ;jp; G1 H1 Z-255 F1800 ; move Z down until the endstop is triggered G30 X50 Y50;JP ADDED G92 Z0 ; set Z position to axis minimum (you may want to adjust this) ; Uncomment the following lines to lift Z after probing ;G91 ; relative positioning ;G1 Z5 F100 ; lift Z relative to current position ;G90 ; absolute positioning; homeall.g ; called to home all axes ; G91 ; relative positioning G1 H2 Z5 F6000 ; lift Z relative to current position G1 H1 X-240 Y-240 F1800 ; move quickly to X and Y axis endstops and stop there (first pass) G1 H2 X5 Y5 F6000 ; go back a few mm G1 H1 X-240 Y-240 F360 ; move slowly to X and Y axis endstops once more (second pass) ;jp; G1 H1 Z-255 F360 ; move Z down stopping at the endstop G30 X50 Y50 ; JP ADDED G90 ; absolute positioning G92 Z0 ; set Z position to axis minimum (you may want to adjust this) ; Uncomment the following lines to lift Z after probing ;G91 ; relative positioning ;G1 Z5 F100 ; lift Z relative to current position ;G90 ; absolute positioning -
@john345463563 said in G32 Error: Probe was not triggered during probing move:
G30 X50 Y50;
That won't work. You need to position the probe first with a G1 X50 Y50 first.
-
Tried that but its still hitting the z switch
https://www.veed.io/view/2662d068-d4fd-4333-b377-a7714f70bd2a
-
This is my homez and homeall, however
when I click homez I get: Error: Insufficient axes homed for bed probing
When I click homeall I get: G32 Error: Probe was not triggered during probing move
This is what happens in both case: https://www.veed.io/view/2662d068-d4fd-4333-b377-a7714f70bd2a
homez.g
G91 ; relative positioning G1 H2 Z5 F6000 ; lift Z relative to current position ;JP REMOVED; G1 H1 Z-255 F1800 ; move Z down until the endstop is triggered G31 X50 Y50 ;JP ADDED G30 X50 Y50 ;JP ADDED G92 Z0 ; set Z position to axis minimum (you may want to adjust this)homeall.g
G91 ; relative positioning G1 H2 Z5 F6000 ; lift Z relative to current position G1 H1 X-240 Y-240 F1800 ; move quickly to X and Y axis endstops and stop there (first pass) G1 H2 X5 Y5 F6000 ; go back a few mm G1 H1 X-240 Y-240 F360 ; move slowly to X and Y axis endstops once more (second pass) ;JP COMMENTED G1 H1 Z-255 F360 ; move Z down stopping at the endstop G31 X50 Y50 ; JP ADDED G30 X50 Y50 ; JP ADDED G90 ; absolute positioning G92 Z0 ; set Z position to axis minimum (you may want to adjust this)BlTouch
M918 P1 E4 F1000000 M558 P9 H5 F120 T6000 C"^probe" M950 S0 C"Servo0" G31 P550 X-40 Y-5 Z2.05 M557 X10:180 Y10:210 S40 -
@john345463563 said in G32 Error: Probe was not triggered during probing move:
M558 P9 H5 F120 T6000 C"^probe" M950 S0 C"Servo0"
Where did you get those?
Can you send M122 and M98 P"config.g" in the gcode console in DWC and copy and paste the results here?
Homez gives you an error like that if the X and Y axis aren't homed yet.
@john345463563 said in G32 Error: Probe was not triggered during probing move:
G31 X50 Y50 ;JP ADDEDG30 X50 Y50 ;JP ADDEDG92 Z0 ; set Z position to axis minimum (you may want to adjust this)
this is all still incorrect.
Here's an example of what it should be
homeall.g G91 ; relative positioning G1 H2 Z5 F6000 ; lift Z relative to current position G1 H1 X-240 Y-240 F1800 ; move quickly to X and Y axis endstops and stop there (first pass) G1 H2 X5 Y5 F6000 ; go back a few mm G1 H1 X-240 Y-240 F360 ; move slowly to X and Y axis endstops once more (second pass) G90 ; absolute positioning G1 X150 Y150 F6000 ; move to bed center G30 ; probe zAnd here is an example of what the bltouch config should look like
; Z-Probe M950 S0 C"exp.heater3" ; create servo pin 0 for BLTouch M558 P9 C"^zprobe.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds G31 P500 X0 Y0 Z2.5 ; set Z probe trigger value, offset and trigger height M557 X15:215 Y15:195 S20 ; define mesh grid -
@Phaedrux
Thank you so much for your help!I'm doing some progress, now the extruder will move in the middle on the bed but then I get this error:
Error: Invalid Z probe index Error: in file macro line 8: G30: Z probe 0 not foundand
Error: in file macro line 11: G30: Z probe 0 not found -
Did you also fix up the bltouch config in your config.g?
Can you send M122 and M98 P"config.g" in the gcode console in DWC and copy and paste the results here?
-
M122 returns but M98 P"config.g" erros and the connection is reseted, I am using a BLtouch clone.
; Z-Probe M950 S0 C"exp.heater3" ; create servo pin 0 for BLTouch M558 P9 C"^zprobe.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds G31 P500 X0 Y0 Z2.5 ; set Z probe trigger value, offset and trigger height M557 X15:215 Y15:195 S20 ; define mesh grid>>> m122 SENDING:M122 === Diagnostics === RepRapFirmware for STM32F4 based Boards (biquskr_rrf_e3_1.1) version 3.4.2_101 (2022-09-14 11:00:21) running on STM32F4 Board ID: 21064-0N0JA-JJ5T4-7S18N-GBQS7-40000 Used output buffers: 1 of 40 (23 max) === RTOS === Static ram: 19520 Dynamic ram: 84372 of which 648 recycled Never used RAM 25504, free system stack 161 words CCMRam static ram: 16760 dynamic ram: 19708 free ram 29064 Tasks: NETWORK(ready,11.9%,242) HEAT(notifyWait,0.0%,347) Move(notifyWait,0.0%,361) TMC22xx(delaying,1.7%,135) FSWRITE(notifyWait,0.0%,566) MAIN(running,86.4%,436) IDLE(ready,0.0%,29), total 100.0% Owned mutexes: WiFi(NETWORK) BITIO(TMC22xx) USB(MAIN) === Platform === Last reset 00:14:34 ago, cause: power on/off Last software reset at 2022-11-06 13:21, reason: User, GCodes spinning, available RAM 27092, slot 1 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00454000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a Error status: 0x00 [ERROR] Error status: 0x00 Aux0 errors 0,0,0 Step timer max interval 0 MCU temperature: min 40.8, current 43.6, max 43.6 Supply voltage: min 24.0, current 24.0, max 24.0, under voltage events: 0, over voltage events: 0, power good: yes Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0 Events: 0 queued, 0 completed Driver 0: standstill 2209, SG min 0, reads 49289, writes 8 Driver 1: standstill 2209, SG min 0, reads 49289, writes 8 Driver 2: standstill 2209, SG min 0, reads 49289, writes 8 Driver 3: standstill 2209, SG min 0, reads 49290, writes 8 Driver 4: Driver 5: Driver 6: Driver 7: Driver 8: Driver 9: Driver 10: Driver 11: Driver 12: Driver 13: Date/time: 2022-11-07 15:32:21 Slowest loop: 162.98ms; fastest: 0.09ms === Storage === Free file entries: 10 SD card 0 detected SD card longest read time 1.2ms, write time 0.0ms, max retries 0 === Move === DMs created 83, segments created 0, maxWait 0ms, bed compensation in use: none, comp offset 0.000 === MainDDARing === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === AuxDDARing === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters 0 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0 Heater 1 is on, I-accum = 0.0 === GCodes === Segments left: 0 Movement lock held by null HTTP is idle in state(s) 0 File is idle in state(s) 0 USB is ready with "M122" in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 Daemon is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty === Network === Slowest loop: 20.75ms; fastest: 0.00ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) HTTP sessions: 2 of 8 Uploads/Errors: 0/0 = WiFi = Network state is active WiFi module is connected to access point Failed messages: pending 0, notready 0, noresp 0 Bad header: 0/0 WiFi firmware version 1.25B0-01S-D WiFi MAC address 62:22:32:1d:82:4d WiFi Vcc 3.38, reset reason Turned on by main processor WiFi flash size 4194304, free heap 35192 WiFi IP address 192.168.20.121 WiFi signal strength -68dBm, mode 802.11n, reconnections 0, sleep mode modem Clock register 00004002 Socket states: 0 0 0 0 0 0 0 0>>> M98 P"config.g" SENDING:M98 P"CONFIG.G" HTTP is enabled on port 80 FTP is disabled TELNET is disabled Error: bad model parameters [ERROR] Error: bad model parameters Led port is 0 Pin is already allocated as pwm 48 WiFi module is idle Error: Unknown pin name 'exp.heater3' [ERROR] Error: Unknown pin name 'exp.heater3' Error: Unknown pin name 'zprobe.in' [ERROR] Error: Unknown pin name 'zprobe.in' Error: Invalid Z probe index [ERROR] Error: Invalid Z probe index Error: in file macro line 105: M591: missing parameter 'C' [ERROR] Error: in file macro line 105: M591: missing parameter 'C' -
 undefined Phaedrux moved this topic from General Discussion
undefined Phaedrux moved this topic from General Discussion
-
You didn't mention it was an STM based board. I don't know what the correct pin names for that board would be. But once you find them, it should work once you put them into bltouch probe config. Don't forget to also setup the Deployprobe.g and Retractprobe.g macros in the sys folder.
-
@john345463563 pin names are here
https://teamgloomy.github.io/skr_rrf_e3_pins.html -
I think this is the Out of the Box pin configuration, however this was not working, I believe:
; BlTouch ; set Z probe type to bltouch and the dive height + speeds M558 P9 H5 F120 T6000 C"^probe" ; Setup Servo0 as servo port on SKR-RRF-E3 M950 S0 C"Servo0" G31 P550 X-40 Y-5 Z2.05 M557 X10:180 Y10:210 S40 -
@john345463563 yep, that looks right https://teamgloomy.github.io/skr_rrf_e3_bltouch.html
so i would suggest rechecking your wiring -
@jay_s_uk
with the OOB config the z will hit multiple time on the Z switch when home all:
https://www.veed.io/view/30b310ca-1c11-4b33-a064-c4d5c6d43daf?panel=share; BlTouch M558 P9 H5 F120 T6000 C"^probe" M950 S0 C"Servo0" G31 P550 X-40 Y-5 Z2.05 M557 X10:180 Y10:210 S40homeall.g G91 G1 H2 Z5 F6000 G1 H1 X-240 Y-240 F1800 G1 H2 X5 Y5 F6000 G1 H1 X-240 Y-240 F360 G90 G1 X150 Y150 F6000 G30 -
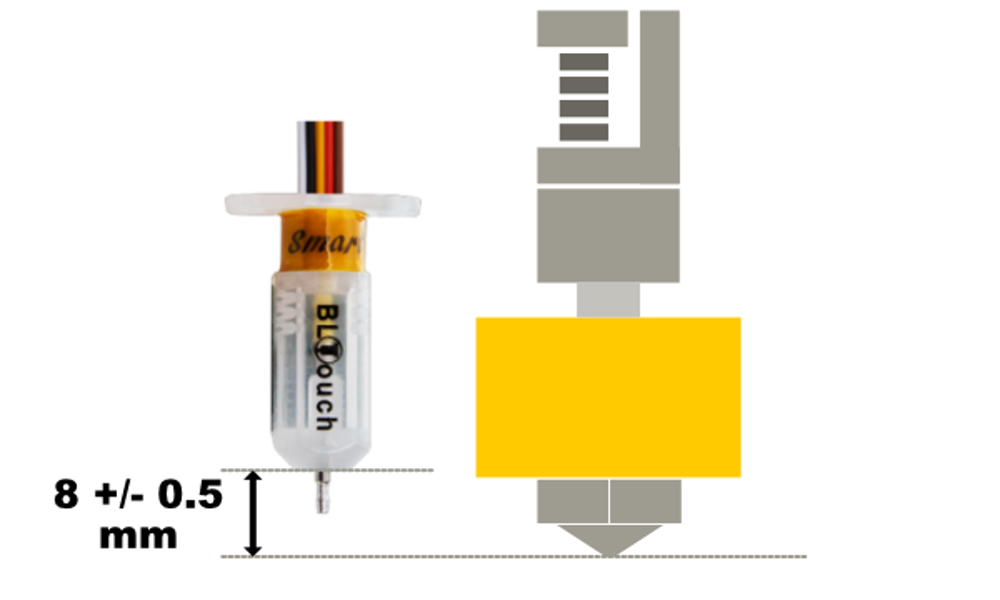
You'll need to physically alter the placement of the BLtouch to lower it down a bit and probably move the z endstop out of the way. The bottom of the BLtouch body should be ~8mm above the nozzle tip to allow for proper trigger height.
-
If you raise the print head higher up and then do a homeall can you touch the pin with your finger to see if it stops z motion correctly?
-
Yeah! thats one part of problem if I touch the pin while homing it will not stop the motor check the video:
https://www.veed.io/view/47fba682-59b9-4054-8d5c-fa732df8e43f?panel=sharethe BLTouch wil changing color and at the end it will become red
-
Check the continuity of the signal wire. That's usually the white one that would be going to the "probe" input pin.
-
Thank you so much! @Phaedrux
Great Call! i've inverted 3dTouch white and black wire and now the sensor works.
Now I am Following this:
https://docs.duet3d.com/User_manual/Connecting_hardware/Z_probe_testingI send these commands:
- M561
- M564 S0
- G92 Z0
- G30 S-1 Stopped at height 1.510 mm
- edited in congif.g
---> G31 P550 X-40 Y-5 Z1.51 - Reboted
Now I will like to level the bed and print, i am
- homing X (not configured for BLtouch)
- homing Y (not configured for BLtouch)
- homing Y (not configured for BLtouch)
- HomeAll (not sure why the home is in the middle of the bed)
- True Bed leveling G32 (should I use this or the other?)
- HomeAll (not sure why the home is in the middle of the bed)
I am wondering:
- Is that the correct way of leveling?
- is there something wrong in my configuration?
- I am also wondering why the homeAll is going in the middle?
- should I edit also the homeX, homeY, HomeZ?
- Is there any video/tutorial/info on how to level the bed?
homeall.g
G91 G1 H2 Z5 F6000 G1 H1 X-240 Y-240 F1800 G1 H2 X5 Y5 F6000 G1 H1 X-240 Y-240 F360 G90 ; JP ADDED G1 X150 Y150 ; JP ADDED G30 ; JP ADDEDHomeX,Y,Z
; homex.g HomeX G91 ; relative positioning G1 H2 Z5 F6000 ; lift Z relative to current position G1 H1 X-240 F1800 ; move quickly to X axis endstop and stop there (first pass) G1 H2 X5 F6000 ; go back a few mm G1 H1 X-240 F360 ; move slowly to X axis endstop once more (second pass) G1 H2 Z-5 F6000 ; lower Z again G90 ; absolute positioning; homex.g ; homey.g HomeY G91 ; relative positioning G1 H2 Z5 F6000 ; lift Z relative to current position G1 H1 Y-240 F1800 ; move quickly to Y axis endstop and stop there (first pass) G1 H2 Y5 F6000 ; go back a few mm G1 H1 Y-240 F360 ; move slowly to Y axis endstop once more (second pass) G1 H2 Z-5 F6000 ; lower Z again G90 ; absolute positioning ; homez.g HomeZ G91 ; relative positioning G1 H2 Z5 F6000 ; lift Z relative to current position G1 H1 Z-255 F1800 ; move Z down until the endstop is triggered G92 Z0 ; set Z position to axis minimum (you may want to adjust this)config.g
M558 P9 H5 F120 T6000 C"^probe" M950 S0 C"Servo0" G31 P550 X-40 Y-5 Z1.51 M557 X50:180 Y50:210 S40config-override.g
; config-override.g file generated in response to M500 at 2021-01-20 10:10 ; This is a system-generated file - do not edit ; Heater model parameters M307 H0 R2.429 C140.000:140.000 D5.50 S1.00 V0.0 B0 M307 H1 R2.429 C140.000:140.000 D5.50 S1.00 V0.0 B0 ; Workplace coordinates G10 L2 P1 X0.00 Y0.00 Z0.00 G10 L2 P2 X0.00 Y0.00 Z0.00 G10 L2 P3 X0.00 Y0.00 Z0.00 G10 L2 P4 X0.00 Y0.00 Z0.00 G10 L2 P5 X0.00 Y0.00 Z0.00 G10 L2 P6 X0.00 Y0.00 Z0.00 G10 L2 P7 X0.00 Y0.00 Z0.00 G10 L2 P8 X0.00 Y0.00 Z0.00 G10 L2 P9 X0.00 Y0.00 Z0.00 M486 T0M486 S-1