Based on this graph, do I even need input shaping?
-
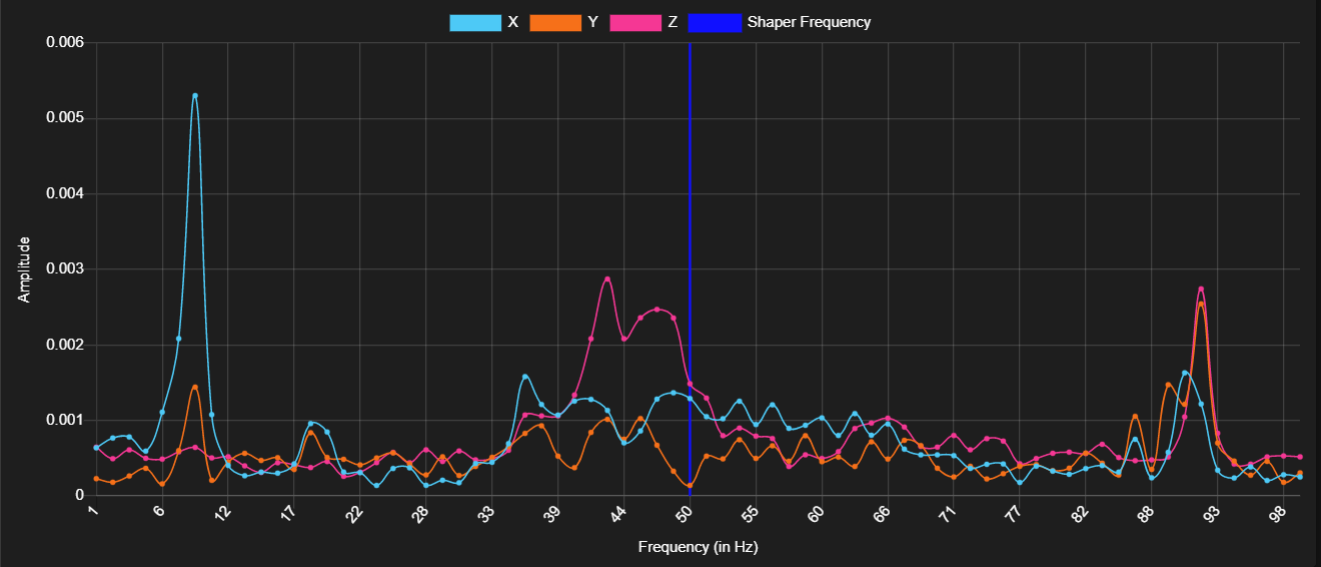
What units is the amplitude measured in? At around 1/1000th between 33Hz and 66Hz, should anything even be noticeable?
Am I interpreting this graph correctly?
-
@gnydick the units are (acceleration in units of 1G) per Hz. However, it's possible that it it missing a scaling factor. If that's the case, then changing the sample time will also change the apparent acceleration/Hz. I'll do some tests when I have time to check whether the scaling factor is being applied.
Do you have any ringing/ghosting apparent on your prints? What sort of printer is it?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 I do have edge ghosting in some places.
It's a railcore II but with so much customization, it can't be considered the same printer anymore. It's running the E3D tool changer, so the gantry is a little heavy.
-
@dc42 bump. Any ideas here?
-
@gnydick which axis did you move to get that plot? Please submit a plot when the other axis (out of X and Y) is moved.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 the input shaping plugin presents 1 graph for multiple moves. Not sure how it combines them. I'll switch to "individual files" and attach below. The first one is X, the second one Y


-
@gnydick the peaks at 10Hz and 14Hz look odd to me. The frequencies are too low to be resonances unless you have a very heavy hot end and very slack belts. My guess is that they are artefacts from the shape of the move.
What X and Y acceleration have you configured? You could try repeating those moves with double the acceleration, to see if those peaks move. Higher acceleration will also make the ringing stronger and easier to see in the plot.
You could also take a print that exhibits ringing and estimate the ringing frequency, by dividing the speed at which the perimeter was printed in mm/sec by the wavelength of the ringing in mm. Then we can see whether that frequency matches something that the accelerometer has picked up.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 I'm not worried about the 10 & 14Hz peaks. My original post mentioned that I'm looking at the local maxima between 33 and 66Hz.
I have a very heavy hot-end, but I don't have slack belts, at least as far as I know.
If I tighten them any more, I suspect I'll start damaging bearings, threads, or something else. The RailCore doesn't have fully constrained bolts on the pulleys.
Oh, and the fact the number are so small, should they even be noticeable?
-
@gnydick I asked what accelerations you have configured because not only could low accelerations account for those low frequency peaks, they might also account for why the values are so low.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@gnydick said in Based on this graph, do I even need input shaping?
,.,.............. I have a very heavy hot-end ..........
That's good in my opinion. Up untill now, I've always used multi input hot ends which are heavy by most people's standards but I've never had any of the ringing, ghosting or other resonance related artefacts that other people complain about. I put that down to the fact that the higher mass results in a lower resonant frequency. This will no doubt be a contentious thing to say but I'm a bit baffled by the current infatuation of reducing mass far below that which is a limiting factor on useable speeds and acceleration, and then having to use all sorts of complicated sensors and algorithms to compensate for the artefacts that this reduced mass produces.
-
@dc42 sorry, I missed that. I've used a wide array and not seen any difference. Anywhere from 1000 to 8000
-
I've tried many different acceleration settings. Tightening belts, super, duper squared and exactly equal belt lengths, etc.
the numbers in the Input Shaping plugin are in the range 10^-4 to 10^-3. How are these values even useful? Wouldn't these amplitudes be imperceptible?
-
@gnydick the scale may be off:
@dc42 said in Based on this graph, do I even need input shaping?:
However, it's possible that it it missing a scaling factor
-
@gnydick did you try my previous suggestion:
You could also take a print that exhibits ringing and estimate the ringing frequency, by dividing the speed at which the perimeter was printed in mm/sec by the wavelength of the ringing in mm. Then we can see whether that frequency matches something that the accelerometer has picked up.
It would be good to confirm whether the edge ghosting you observe matches one of the accelerometer peaks.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
I'll do the measuring soon for you.
In the mean time, what are the expectations for how IS works? What is the unit of the amplitude?
-
@gnydick the units are 1 = gravitational acceleration. As the amplitudes of the peaks in your plot are so small, it may be that your machine doesn't need input shaping.
Input shaping is more effective in RRF 3.6 beta versions than in 3.5.x.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 thanks. Now that you say it's in "G", I knew that, I'm a little embarrassed I forgot that at the time of writing. My last reply.
I measured the wavelength and used that alone as the frequency for input shaping and it seemed to have a little bit of an improvement.
The most improvement is from reducing maximum jerk.
Based on the design, RailCore, X movements have much more inertia to overcome than Y, given I have the e3d tool changer on it.
The input shaping graphs reliably show the difference.
My confusion is how can the amplitude be on the order 10^-4 to 10^-3 and still have such visible artifacts on the print?
-
@gnydick what frequency did you offer from measuring the wavelength of the ringing and knowing the print speed at that point?
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@dc42 ripples were 2mm apart and set it to 30Hz