Duet3 6XD input error problems with Clearpath SDSK
-
Hello everyone, I have the following issue. My large-scale 3D printer is equipped with ball screw spindles and ClearPath SDSK motors on all axes, enabling me to achieve high processing speeds. On the Y-axis, there are two motors controlling individual spindles that run synchronously. In case of an error, I need to trigger an error state. I've managed to do this, but an error is also detected when I first move to the home position. Once the axes are in the home position and the event is cleared, I can move the axes to different positions and induce an error through the mechanics. This induced error is properly recognized at the error input, triggering the event. Now, I could create an error macro that activates during this event. The issue is that this macro also executes when I first move to the home position. I believe the problem lies in the state change of the servo motor output during the initial enable command, resulting in an error. How can I handle this problem?
Best regards
Fabian
-
@FS-TOOLS what you could do is have a global variable that you flag as true at the start of the homing sequence and then change it to false once finished homing.
Then your error macro could ignore the error if that global variable is true -
@jay_s_uk Hello jay_s_uk,
this is my homeall.g
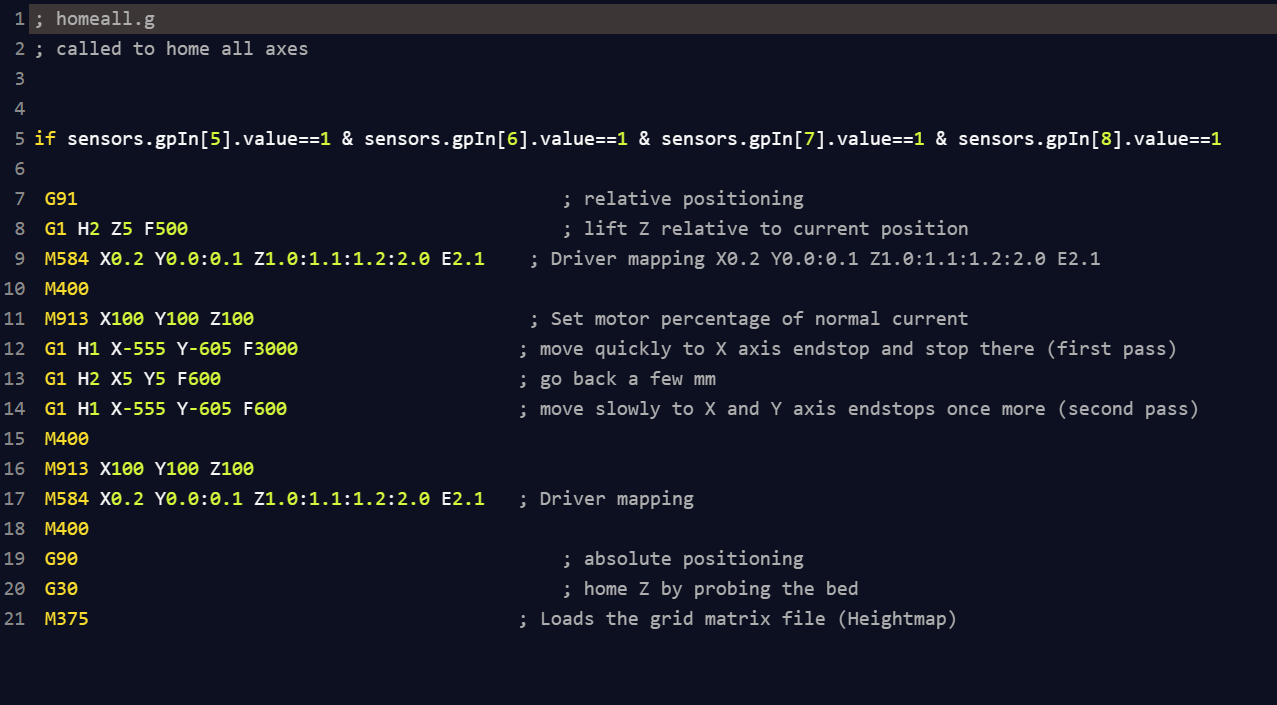
How should this command look like?
Best regards
Fabian
-
@FS-TOOLS something like
if !exists(global.homing) ; checks for the existence of global.homing global homing= true ; if it doesn't exist, set the value to true else set global.homing = true ; if it does exist, set the value to trueat the very beginning
andset global.homing = falseat the very end
then you can you can check its state in the error file
e.g.if !global.homing error stuffthis is worth a read https://docs.duet3d.com/en/User_manual/Reference/Gcode_meta_commands
-
@FS-TOOLS Thank`s a lot.
But is there no way, that the error message doesn`t appers or be indicated at the first homing action?
-
@FS-TOOLS that comes from the drivers I guess so would be outside the control of RRF
-
@jay_s_uk Thank`s for your support!!!!!!!!!!!!!!!