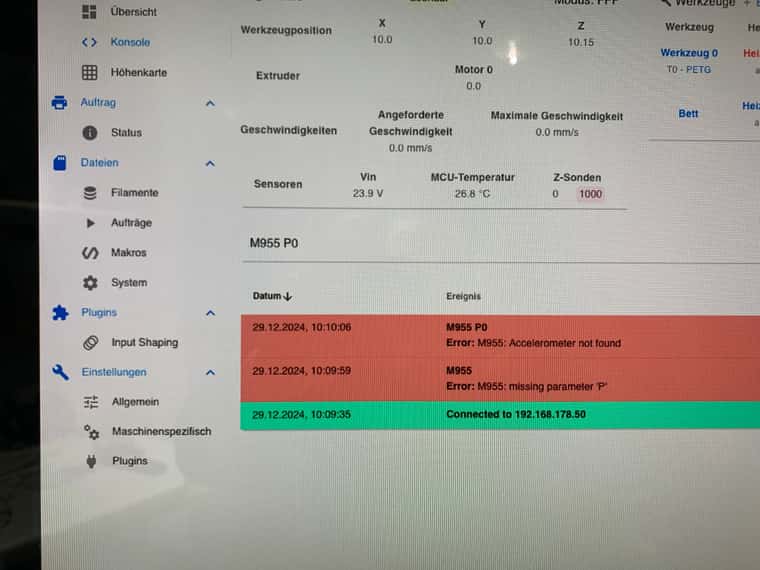
Accelerometer not found
-
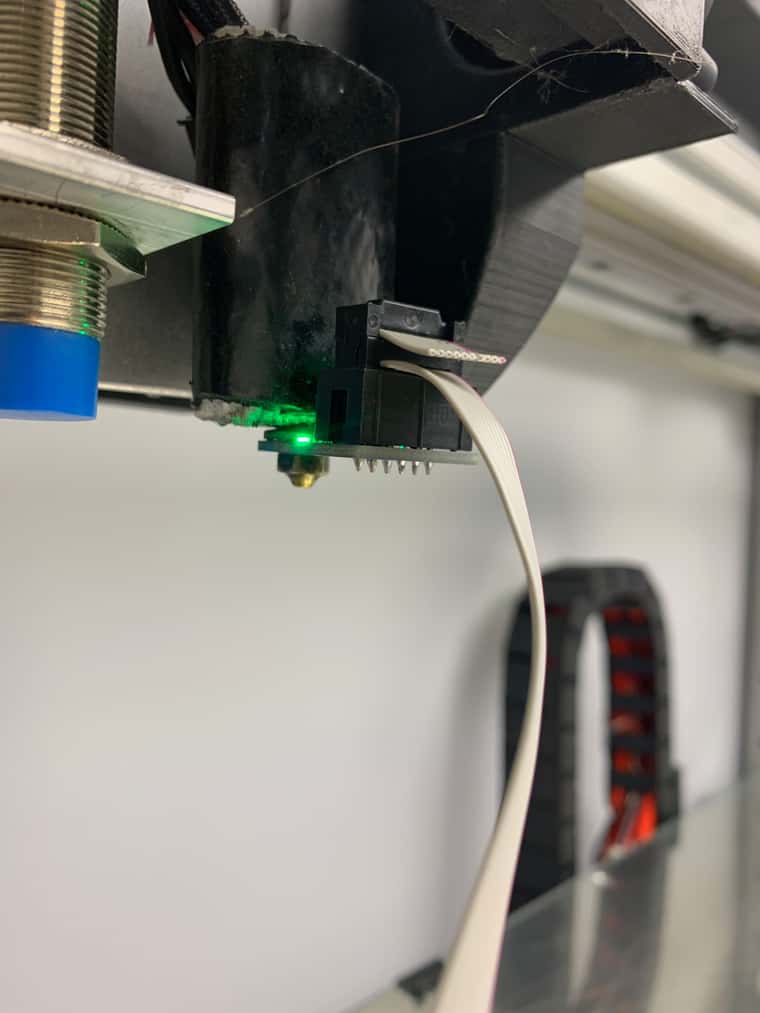
have connected a duet accelerator V 0.2 to my duet 2 wifi dwc 3.4.6 and the control lamp is also green. Then I read that you should unplug the panel, which I did. But the accelerator is still not recognized. What is wrong? I have attached a few pictures!




-
@axiom you need 3.5 I think
-
@jay_s_uk
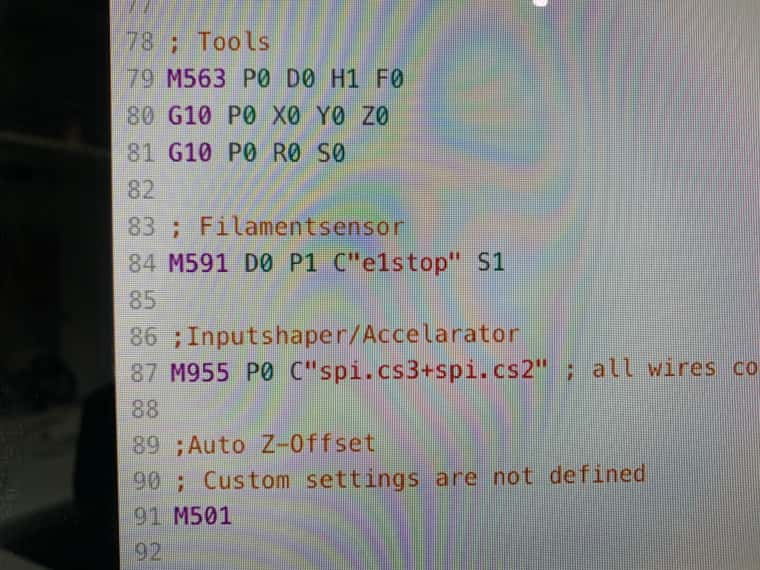
Thankj you.... I updated to 3.5.4, that wasn't the solution, it brings up the error message: macro line 87: Unknown pin name "spi.cs0" -
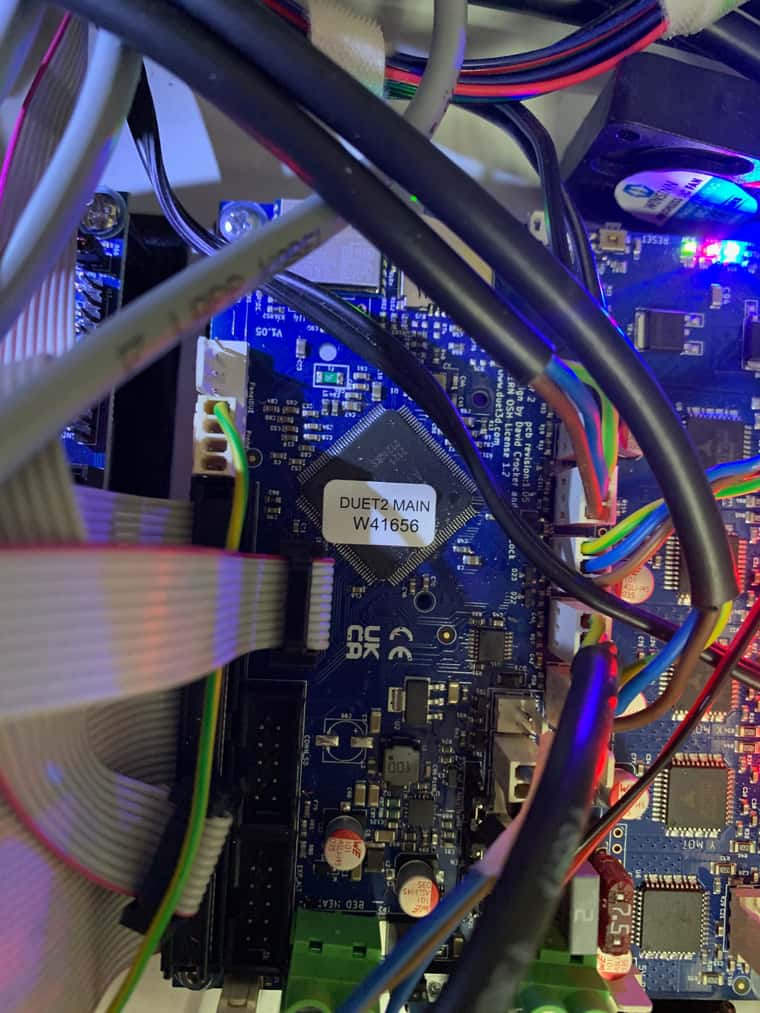
@axiom can you post your whole config please?
-
@jay_s_uk
I'm happy, I took the code from the instructions...if the indicator light on the acelerator lights up green, couldn't it be the wiring?; Configuration file for Duet WiFi (firmware version 3.3) ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.3.16 on Sun May 28 2023 15:23:44 GMT+0200 (Mitteleuropäische Sommerzeit) ; General preferences M575 P1 S1 B57600 ; enable support for PanelDue G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"DUKA1300" ; set printer name ; Network M552 S1 ; enable network M586 P0 S1 ; enable HTTP M586 P1 S1 ; enable FTP M586 P2 S1 ; enable Telnet ; Drives ;M569 P4 R-1 ; Treiber 4 deaktivieren ;M569 P3 R-1 ; Treiber 4 deaktivieren M569 P0 S1 ; physical drive 0 goes forwards M569 P1 S1 ; physical drive 1 goes forwards M569 P2 S1 ; physical drive 2 goes forwards M569 P3 S1 ; physical drive 3 goes forwards M569 P4 S0 ; physical drive 3 goes forwards M569 P5 S1 ; physical drive 3 goes forwards Expansionboard M569 P6 S1 ; physical drive 3 goes forwards Expansionboard M569 P7 S1 ; physical drive 3 goes forwards Expansionboard M569 P8 S1 ; physical drive 3 goes forwards Expansionboard ;M584 X0 Z2 E1 ; set drive mapping ;M584 X0 Z2 E1 ; set drive mapping ;M584 X0:4 Y1 Z2 E3 ; set drive mapping M584 X0:4 Y1 Z5:6:7:8 E3 ; set drive mapping M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X80.00 Y80.00 Z640 E322.58 ; set steps per mm M566 X900.00 Y900.00 Z100.00 E120.00 ; set maximum instantaneous speed changes (mm/min) M203 X6000.00 Y6000.00 Z300.00 E1200.00 ; set maximum speeds (mm/min) M201 X500.00 Y500.00 Z40.00 E250.00 ; set accelerations (mm/s^2) M906 X1800 Y1800 Z1800 E1700 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minima M208 X750 Y643 Z1220 S0 ; set axis maxima ; Endstops M574 X1 S1 P"xstop + e0stop" ; configure switch-type (e.g. microswitch) endstop for low end on X via pin xstop M574 Y1 S1 P"ystop" ; configure switch-type (e.g. microswitch) endstop for low end on Y via pin ystop M574 Z1 S2 ;S1 P"duex.e2stop+duex.e3stop+duex.e4stop+duex.e5stop" ; configure switch-type (e.g. microswitch) endstop for low end on Y via pin ystop ; Z-Probe M558 K0 P5 C"!zprobe.in" H5 F120 T6000 ; set Z probe type to unmodulated and the dive height + speeds (Kapazitiver Sensor) M558 K1 P8 A2 S7 C"duex.e6stop" H5 F80 T3000 G31 P1000 K0 X0 Y-25 Z0.9 ; set Z probe trigger value, offset and trigger height (Kapazitiver Sensor) M557 X0:735 Y-25:573 S35 ; define mesh grid ; Heaters ; Bed M308 S0 P"bedtemp" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin bedtemp M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0 M307 H0 R0.283 K0.463:0.000 D7.17 E1.35 S1.00 B0 ; enable bang-bang mode for the bed heater and set PWM limit M140 H0 ; map heated bed to heater 0 M143 H0 S280 ; set temperature limit for heater 0 to 120C ;Hotend M308 S1 P"e0temp" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin e0temp M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1 M307 H1 R1.797 K0.742:0.000 D7.57 E1.35 S1.00 B0 V23.8 ; disable bang-bang mode for heater and set PWM limit M143 H1 S400 ; set temperature limit for heater 1 to 400C ; Fans M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off M950 F2 C"fan1" Q350 ; create fan 2 on pin fan2 and set its frequency M106 P2 S1 H1 T60 ; set fan 2 value. Thermostatic control is turned on ; Tools M563 P0 D0 H1 F0 ; define tool 1 G10 P0 X0 Y0 Z0 ; set tool 1 axis offsets G10 P0 R0 S0 ; set initial tool 1 active and standby temperatures to 0C ; Filamentsensor M591 D0 P1 C"e1stop" S1 ;R40:120 E3.0 S1 Filament Sensor ;Inputshaper/Accelarator M955 P0 C"spi.cs1+spi.cs0" I10 ; configure accelerometer on mainboard using SPI pins and specify orientation ;Auto Z-Offset ; Custom settings are not defined M501 -
-
@jay_s_uk
wow, thank you so much! That was the solution, now I just have to figure out the input shaping....have a nice Sunday, cheers, Don -
 undefined Phaedrux marked this topic as a question
undefined Phaedrux marked this topic as a question
-
undefined Phaedrux has marked this topic as solved