Wiring BIQU microprobe to Duet RotoToolBoard
-
Hello,
I'm trying to connect a BIQU microprobe V2.0 to my Duet RotoToolBoard.
However, after wiring and seeing the probe deploying and retracting when turn on the Duet3 mini 5+ connected, I cannot control it. Trying to trigger it manually using M401 or M280 P0 S10 do not work and M119 says Z probe non stopped (while probe retracted).Wiring is as follows:
-White cable to the pin IO_0_out of Roto
-Both black cables to pin GND
-Yellow to pin IO_0
-Red cable to pin 5VHere is the section in my config.g file:
M558 P9 H6 F250:30 T8000 C"!^121.io0. in" ; Set probe input to IO_0 on Rototoolboard
M950 P0 C"121.io0.out" ; Set servo output on Rototoolboard
G31 X20 Y0 Z3.3 P25 ; set Z probe trigger value, offset and trigger heightHere is my deployprobe.g file:
M280 P0 S10 ; Deploy probe
G4 P500 ; Pause for 500ms to ensure deploymentHere is my retractprobe.g file:
M280 P0 S90 ; Retract probe
G4 P500 ; Pause for 500msWould you have any idea?
Thank you for your precious help!
Tim
-
@Timothee-Leblond the microprobe isn't a servo so you can't use M280.
You need to use M42. Have you looked at the BTT docs for it? -
@jay_s_uk Thanks for your answer.
Yes indeed, I've been following the doc on Duet's website as well as the teamgloomy tutorial on how to connect a BTT microprobe.
But it's not working as it should.
-
@Timothee-Leblond you have the wrong commands so it won't work.
Can you show me on the teamgloomy wiki on a page for the microprobe it says to use M280?Owns various duet boards and is the main wiki maintainer for the Teamgloomy LPC/STM32 port of RRF. Assume I'm running whatever the latest beta/stable build is
-
@Timothee-Leblond here's the BTT manual for the microprobe v2 https://github.com/bigtreetech/MicroProbe/blob/master/MicroProbe V2 User Manual_20240330.pdf
Owns various duet boards and is the main wiki maintainer for the Teamgloomy LPC/STM32 port of RRF. Assume I'm running whatever the latest beta/stable build is
-
You're right, I was wrong.
I updated everything with the right commands but It is still not working.
-config.g:
M950 P0 C"121.io0.out" ; Set servo output on Rototoolboard
M558 P9 H6 F250:30 T8000 C"^!121.io0 .in" ; Set probe input to IO_0 on Rototoolboard
G31 P500 X0 Y0 Z0 ; set Z probe trigger value, offset and trigger height-deployprobe.g file:
M42 P0 S1 ; Deploy probe
G4 P500 ; Pause for 500ms to ensure deployment-retractprobe.g file:
M42 P0 S0 ; Retract probe
G4 P500 ; Pause for 500ms -
I also created two macros using M42 P0 S1/S0 but there also not working.
-
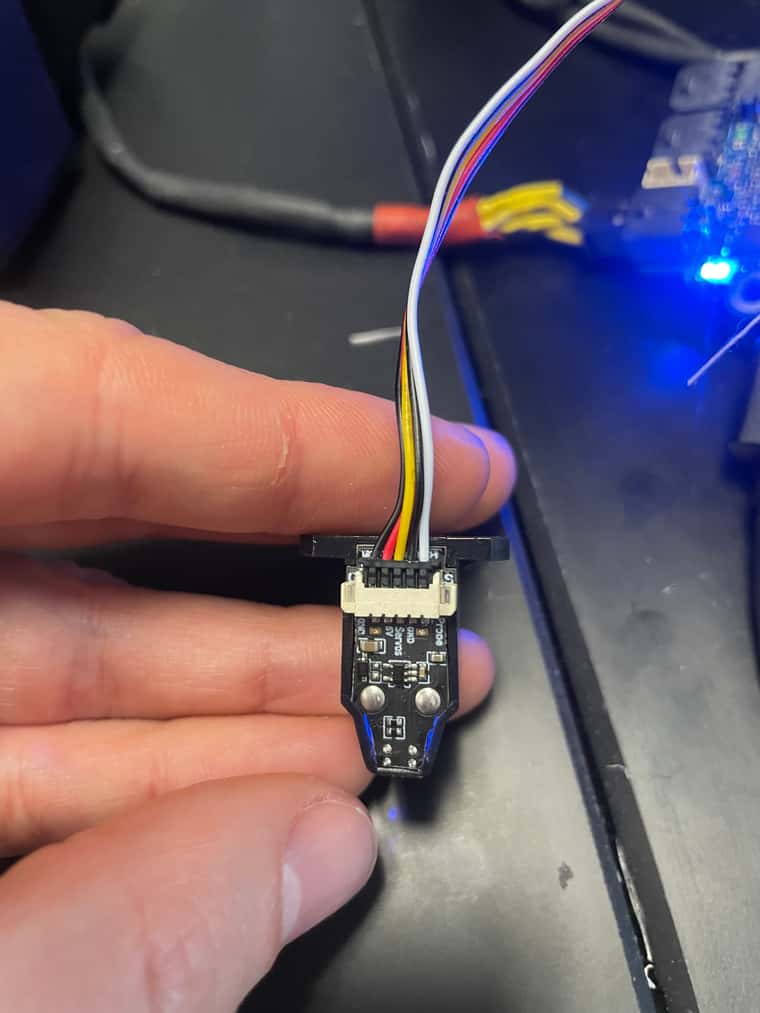
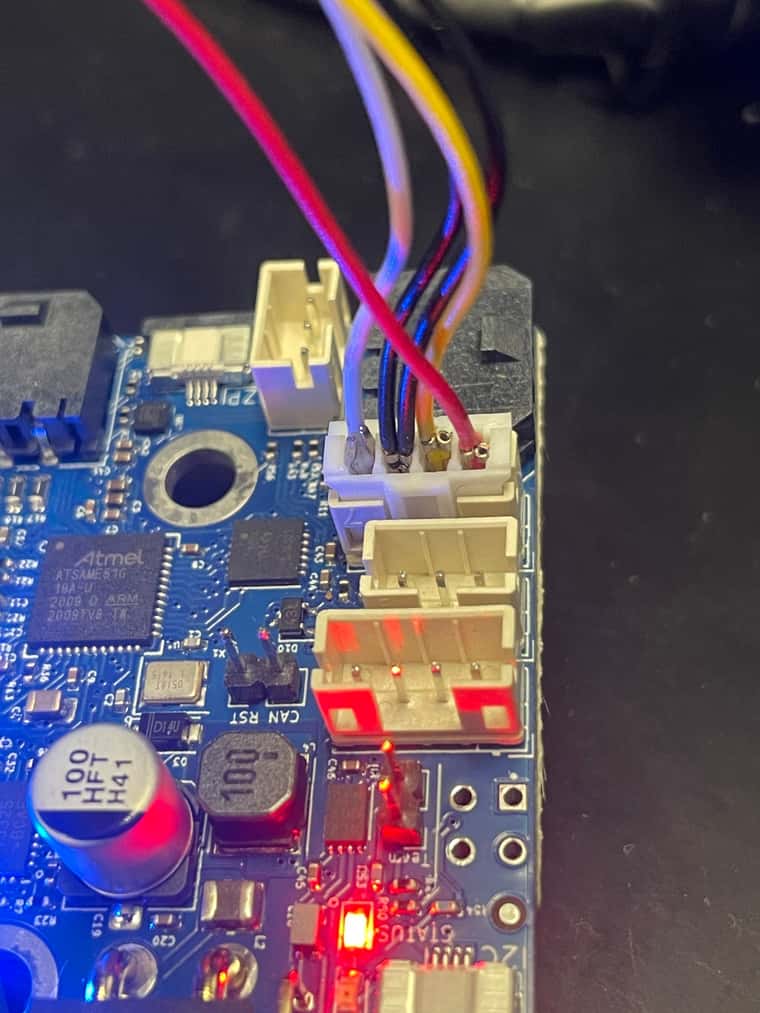
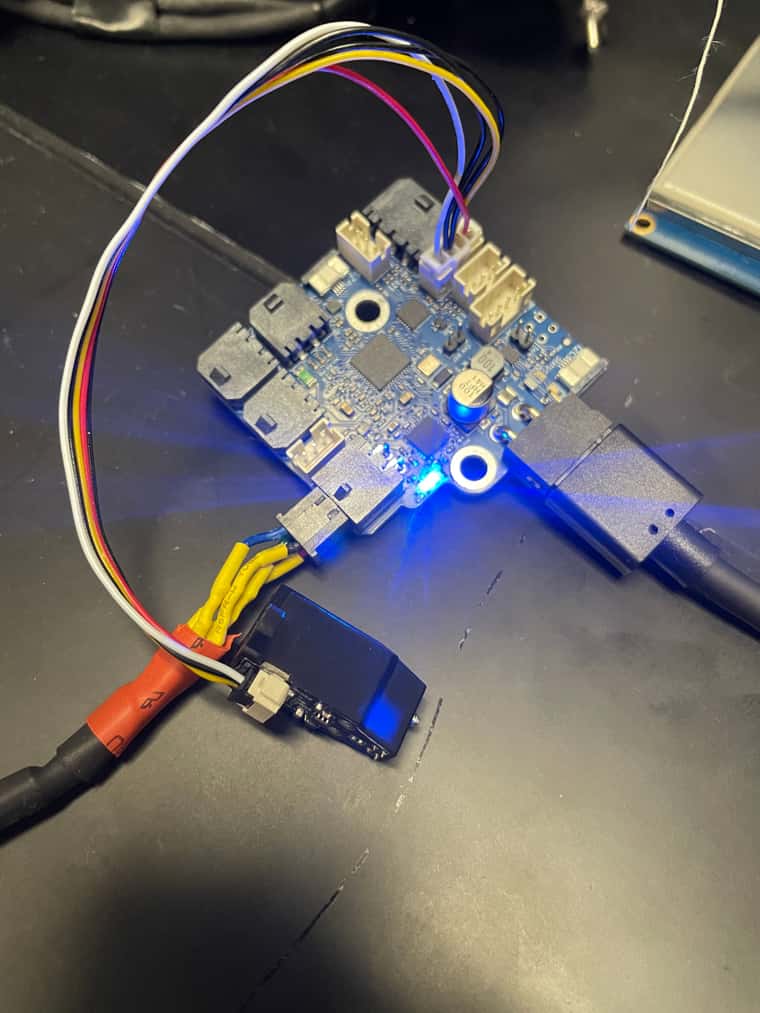
@Timothee-Leblond can you show your wiring?
-
-
@Timothee-Leblond that wiring looks a little rough. it may well be that a couple of the pins aren't making a full connection.
The crimps should be fully inside the housing and locked in placeOwns various duet boards and is the main wiki maintainer for the Teamgloomy LPC/STM32 port of RRF. Assume I'm running whatever the latest beta/stable build is
-
The microprobe is connected to IO_0 as follows:
-White cable to the pin IO_0_out of Roto
-Both black cables to pin GND
-Yellow to pin IO_0
-Red cable to pin 5VWhat triggers me is that the probe is deploying and retracting when I start the motherboard.
-
I agree with you but It's working when the motherboard starts so I'm assuming it should be ok?
I will rewire it for sure to eliminate this doubt. -
@Timothee-Leblond all that means is its getting power. the mainboard doesn't send any signals to it at start
-
Got it. The status led is also blinking red. Do you think my problem could come from this?
If yes, how should I solve this?Thanks for your help,
-
@Timothee-Leblond i would recheck all your wiring first and make sure thats sound and fully connected properly first
Owns various duet boards and is the main wiki maintainer for the Teamgloomy LPC/STM32 port of RRF. Assume I'm running whatever the latest beta/stable build is
-
@jay_s_uk I double checked and rewired everything but I feel the rototoolboard is not communicating with the mainboard. The light is still blinking red.
Prior the installation of the Raspberry Pi, it was working as far as I remember.
-
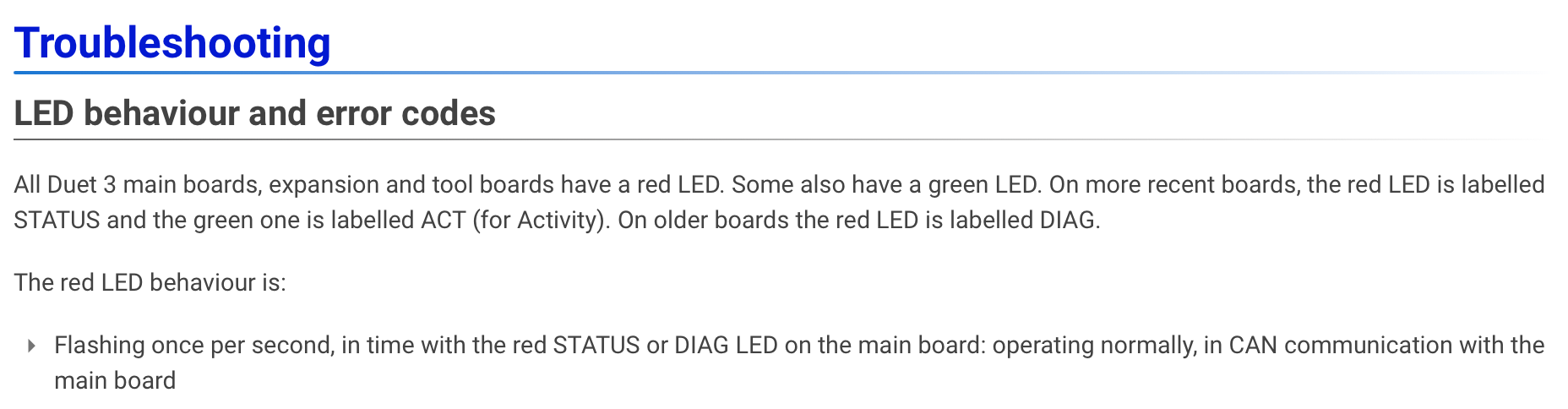
From what I read here, the status LED flashing red once per second at the second is normal and does not indicate a problem.
But I still can't send any command to the Roto Tool Board...
-
@Timothee-Leblond Does the Roto board show up in DWC > Settings > Machine specific > Electronics? What firmware version does it report there, and CAN bus address? Then post your full config.g.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
Sending a M122 B121 command works. It shows a communication between both Roto and Duet3.
-
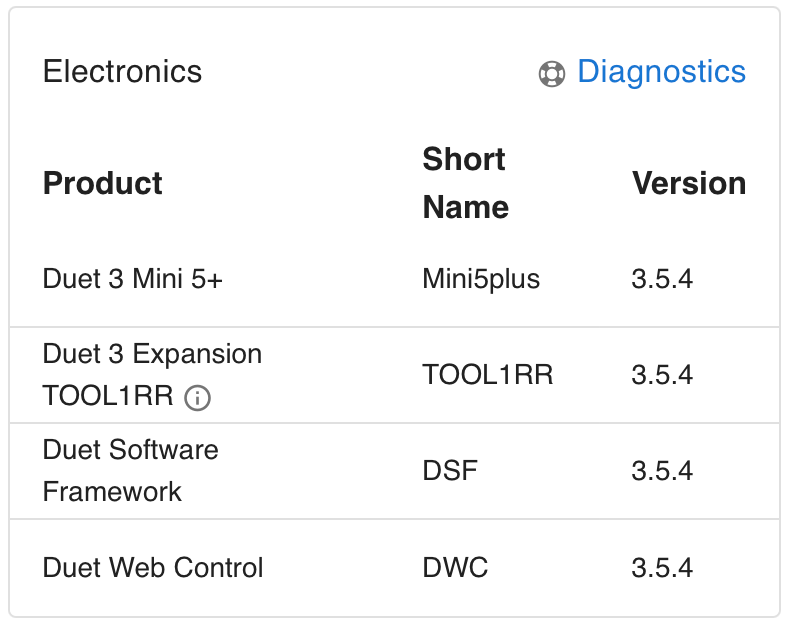
@droftarts Here is what I have: