Wiring BIQU microprobe to Duet RotoToolBoard
-
@Timothee-Leblond can you show your wiring?
-
-
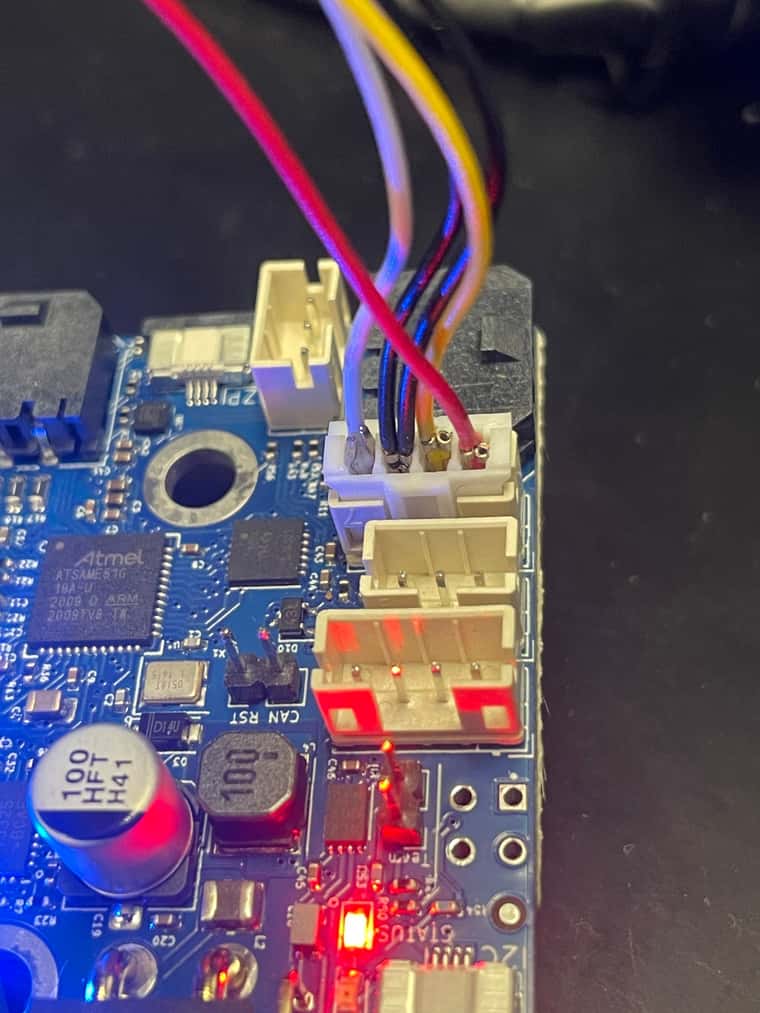
@Timothee-Leblond that wiring looks a little rough. it may well be that a couple of the pins aren't making a full connection.
The crimps should be fully inside the housing and locked in placeOwns various duet boards and is the main wiki maintainer for the Teamgloomy LPC/STM32 port of RRF. Assume I'm running whatever the latest beta/stable build is
-
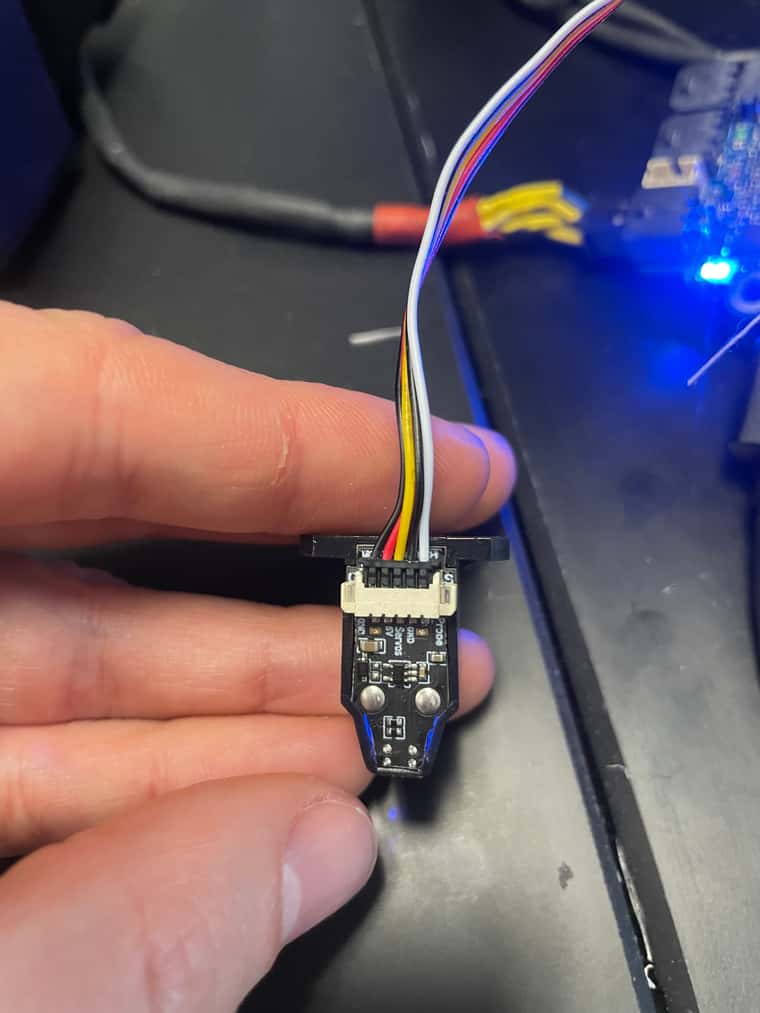
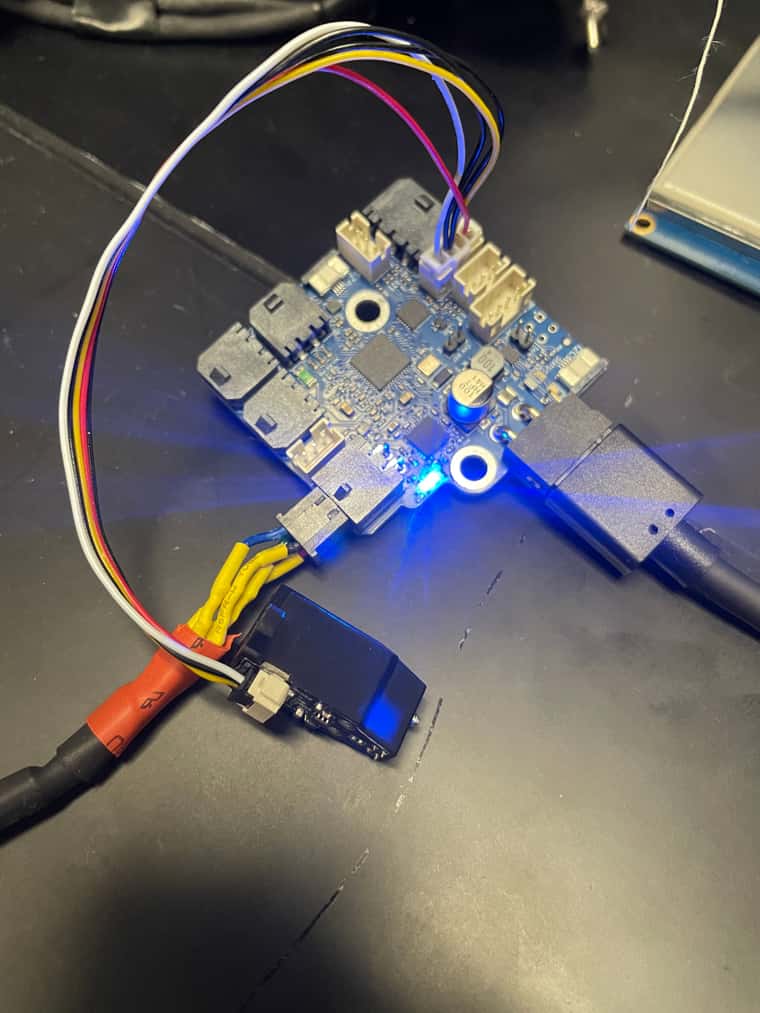
The microprobe is connected to IO_0 as follows:
-White cable to the pin IO_0_out of Roto
-Both black cables to pin GND
-Yellow to pin IO_0
-Red cable to pin 5VWhat triggers me is that the probe is deploying and retracting when I start the motherboard.
-
I agree with you but It's working when the motherboard starts so I'm assuming it should be ok?
I will rewire it for sure to eliminate this doubt. -
@Timothee-Leblond all that means is its getting power. the mainboard doesn't send any signals to it at start
-
Got it. The status led is also blinking red. Do you think my problem could come from this?
If yes, how should I solve this?Thanks for your help,
-
@Timothee-Leblond i would recheck all your wiring first and make sure thats sound and fully connected properly first
Owns various duet boards and is the main wiki maintainer for the Teamgloomy LPC/STM32 port of RRF. Assume I'm running whatever the latest beta/stable build is
-
@jay_s_uk I double checked and rewired everything but I feel the rototoolboard is not communicating with the mainboard. The light is still blinking red.
Prior the installation of the Raspberry Pi, it was working as far as I remember.
-
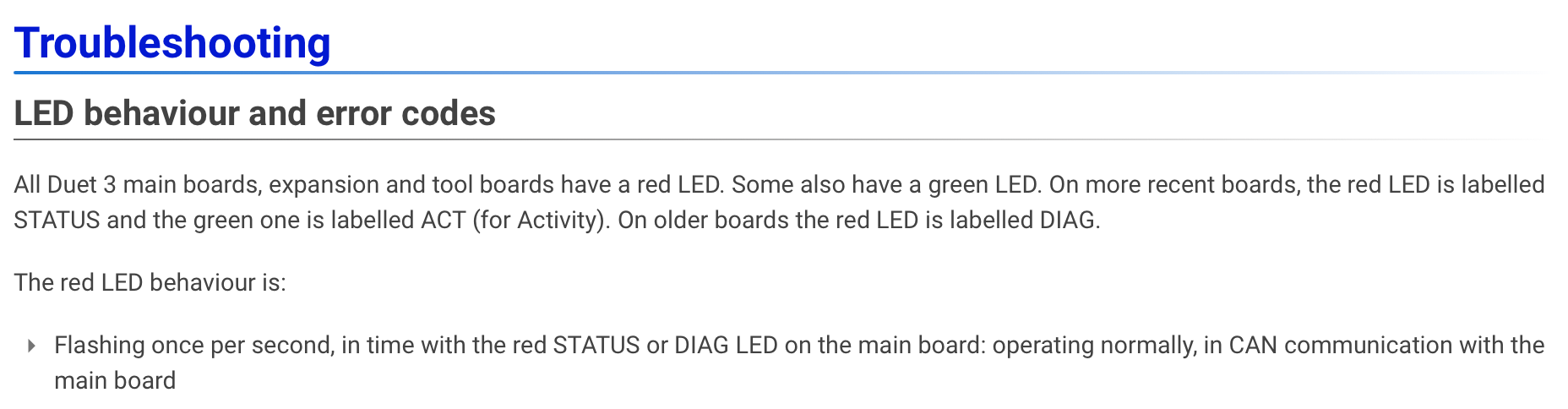
From what I read here, the status LED flashing red once per second at the second is normal and does not indicate a problem.
But I still can't send any command to the Roto Tool Board...
-
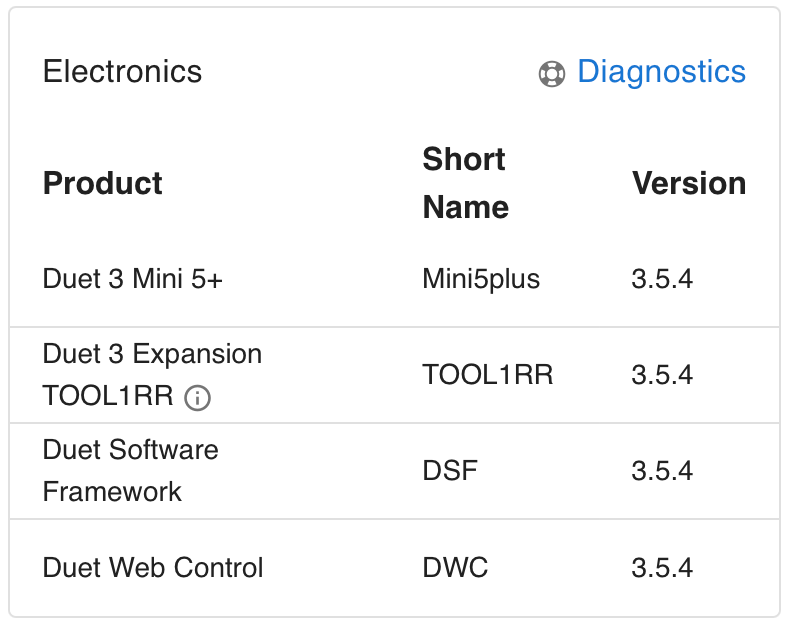
@Timothee-Leblond Does the Roto board show up in DWC > Settings > Machine specific > Electronics? What firmware version does it report there, and CAN bus address? Then post your full config.g.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
Sending a M122 B121 command works. It shows a communication between both Roto and Duet3.
-
@droftarts Here is what I have:
-
@Timothee-Leblond What commands are you trying to send to the Roto board? Is it just the probe commands, or does the stepper motor you connected not work? And please post your full config.g.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
I do have one stepper motor as well as my BTT microprobe connected to the Roto board.
I first wanted to verify if the microprobe was working using command like M42 S0 S1/S0 before trying to home anything. However, I cannot control it.In the past I successfully managed to control the stepper sending it extrusion commands but since I plugged-in the Raspberri Pi to get the 5g Wifi - it is now impossible to command the stepper either.
Here is my config.g:
config.g -
@Timothee-Leblond your config.g:
; Default config.g template for DuetPi ; Replace this with a proper configuration file (e.g from https://configtool.reprapfirmware.org) ; Display initial welcome message M291 P"You are operating an SBC image in standalone mode. Please see <a href=""https://www.duet3d.com/StartHere"" target=""_blank"">here</a> further information." R"Welcome to your new Duet 3!" S1 T0 ; Enable PanelDue M575 P1 B57600 S1 ; Enable network ; M552 P0.0.0.0 S1 ; Configuration file for RepRapFirmware on Duet 3 Mini 5+ Ethernet ; executed by the firmware on start-up ; ; generated by RepRapFirmware Configuration Tool v3.5.8 on Fri Dec 13 2024 08:59:52 GMT-0500 (Eastern Standard Time) ; General G90 ; absolute coordinates M83 ; relative extruder moves M550 P"Duet 3" ; set hostname ; Accessories M575 P1 S0 B57600 ; configure PanelDue support ; Wait a moment for the CAN expansion boards to become available G4 S2 ; Smart Drivers M569 P0.0 S1 D2 ; driver 0.0 goes forwards (X axis) M569 P0.1 S1 D2 ; driver 0.1 goes forwards (Y axis) M569 P0.2 S1 D2 ; driver 0.2 goes forwards (Z axis) M569 P121.0 S0 D2 ; driver 20.0 goes forwards (extruder 0) ; Motor Idle Current Reduction M906 I30 ; set motor current idle factor M84 S30 ; set motor current idle timeout ; Axes M584 X0.0 Y0.1 Z0.2 ; set axis mapping M350 X16 Y16 Z16 I1 ; configure microstepping with interpolation M906 X800 Y800 Z800 ; set axis driver currents M92 X80 Y80 Z400 ; configure steps per mm M208 X-6:310 Y0:310 Z-5:405 ; set minimum and maximum axis limits M566 X900 Y900 Z12 ; set maximum instantaneous speed changes (mm/min) M203 X6000 Y6000 Z180 ; set maximum speeds (mm/min) M201 X500 Y500 Z20 ; set accelerations (mm/s^2) ; Extruders M584 E121.0 ; set extruder mapping M350 E16 I1 ; configure microstepping with interpolation M906 E1600 ; set extruder driver currents M92 E28.09 ; configure steps per mm M566 E120 ; set maximum instantaneous speed changes (mm/min) M203 E3600 ; set maximum speeds (mm/min) M201 E250 ; set accelerations (mm/s^2) ; Kinematics M669 K0 ; configure Cartesian kinematics ; Probes M950 P0 C"121.io0.out" ; Set servo output on Rototoolboard M558 P9 H6 F250:30 T8000 C"^!121.io0.in" ; Set probe input to IO_0 on Rototoolboard G31 P500 X0 Y0 Z0 ; set Z probe trigger value, offset and trigger height ; Endstops M574 X1 S3 ; configure X axis endstop M574 Y1 S3 ; configure Y axis endstop M574 Z1 S2 ; configure Z axis endstop M915 X Y R0 F0 ; Tools M563 P0 S"MainExtruder" D0 F0 ; create Tool 0 using Extruder Drive 0 G10 P0 S0 R0 ; set Tool 0 active and standby temperatures to 0 T0 ; select Tool 0 at startupsend
M98 P"config.g"and see if it reports any errors. I think your tool has a fan defined, but no fan has been defined, so the tool command will error. Remove the 'F0' from the M563 line.Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
-
@Timothee-Leblond said in Wiring BIQU microprobe to Duet RotoToolBoard:
since I plugged-in the Raspberri Pi to get the 5g Wifi - it is now impossible to command the stepper either.
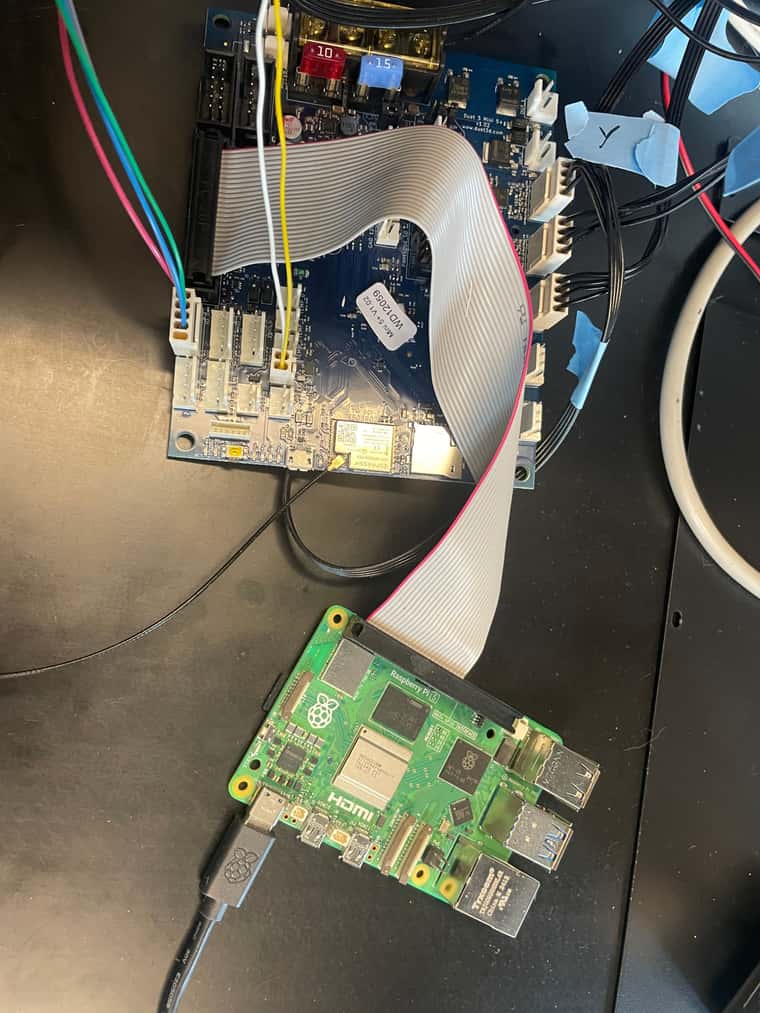
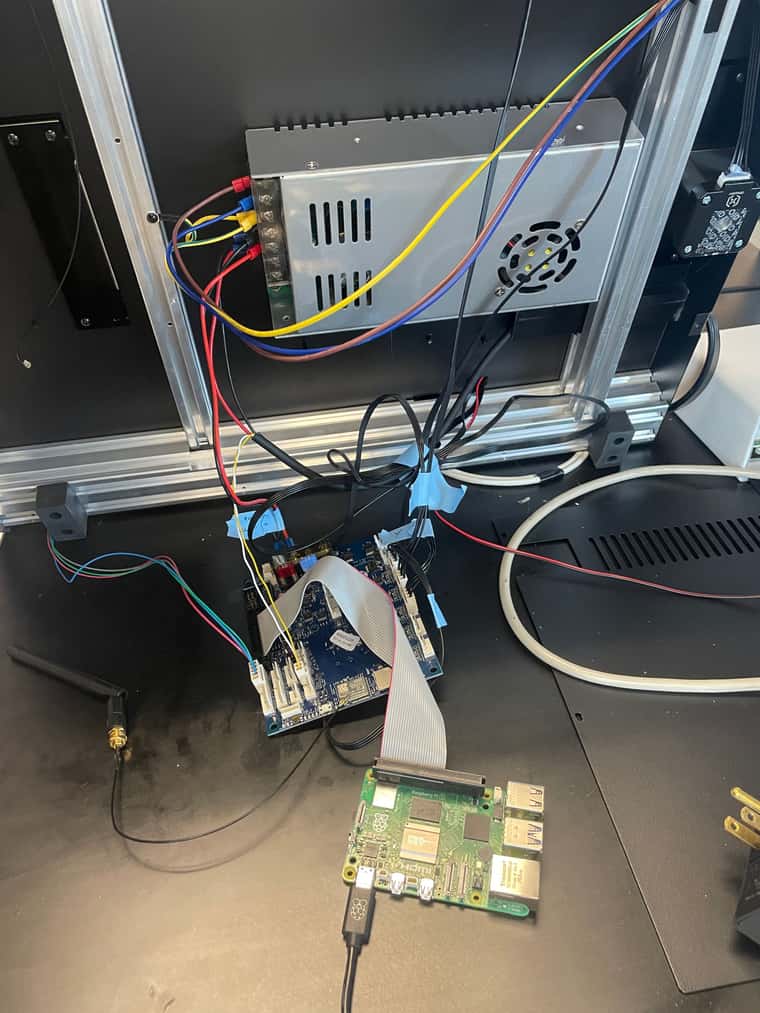
Can you show some photos of your setup please? How is the Pi connected to the Duet and how is it powered?
-
I've been testing two MicroProbes with a Duet 3 Mini 5+.
When power is applied the probe does it's normal self-test.
After that I can issue one probe deploy command M280 P0 S10.
The pin extends, then retracts.
After that the probe no longer responds to any commands but sits there deploying/retracting, seemingly at random.
As I test I replaced it with a BLTouch and that works just as expected.
I think there is something wrong with the design of the MicroProbe.
Frederick
Printers: a E3D MS/TC setup and a RatRig Hybrid. Using Duet 3 hardware running 3.4.6
-
The Pi is connected to the Duet using the big ribbon that came with it. The Pi is powered by a Raspberry Power supply and the Duet by the power supply of my last printer (Artillery Sidewinder x4 plus). The SD card is in the Raspberry. It seems like it is working as I can connect to DWC through wifi which was not possible through the Duet alone (5g network).