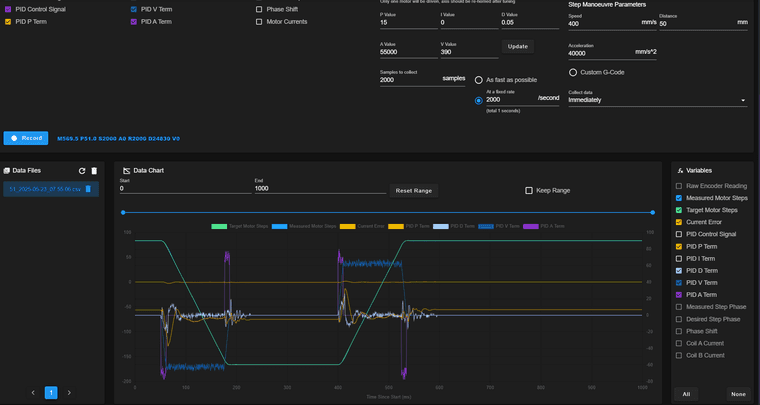
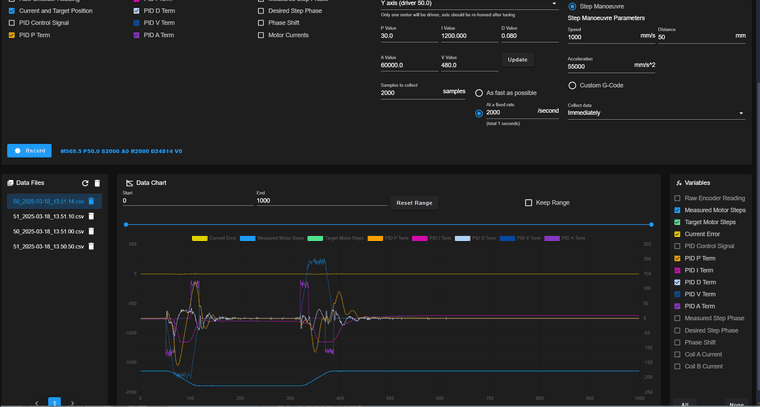
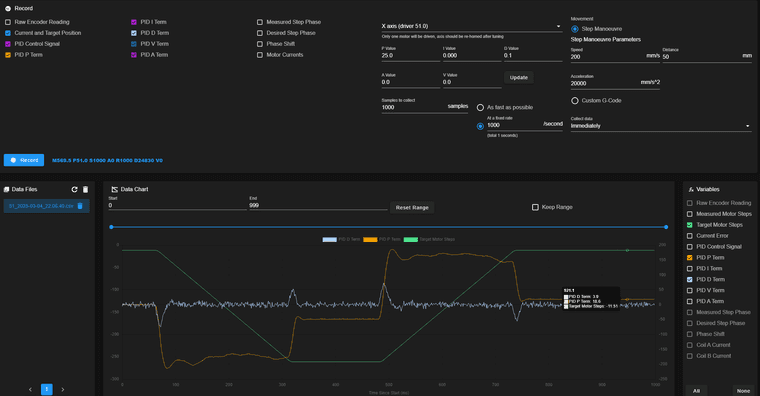
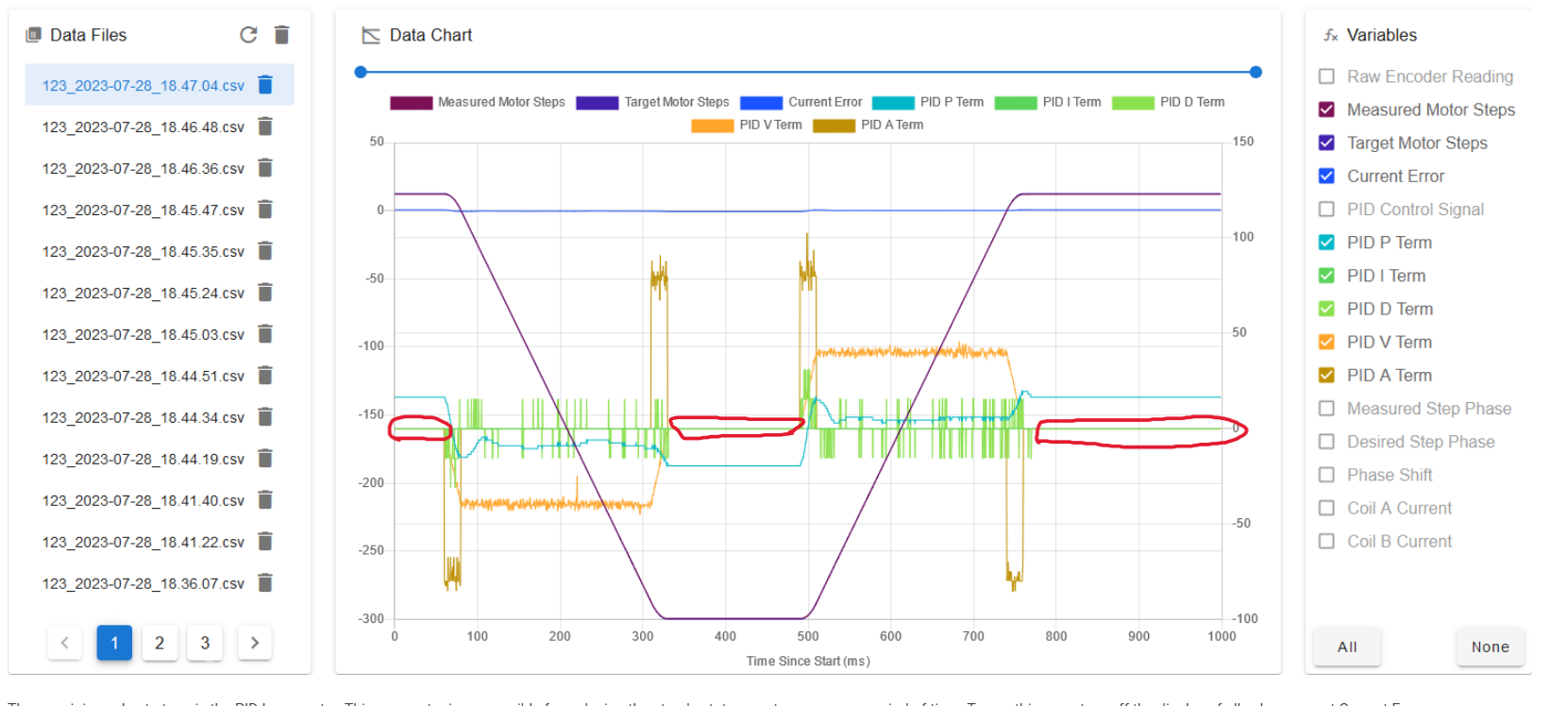
I tried a P therm of 15. But i get those high peaks (Error/PID) in the accelereation segments of the move.
Posts made by Tech_Sam03
-
RE: Core XY high speed closed loop tuningposted in Tuning and tweaking
-
RE: DWC overlay on DSFposted in General Discussion
Days will pass until there is finally a new display🥲 I hope it will be soon…
-
DWC overlay on DSFposted in General Discussion
I'm currently in the process of connecting my Duet 5 mini to an SBC. I'm not sure yet whether it makes sense to upgrade my PanelDue (the interface is very outdated) to a 5-inch HDMI touch display. Unfortunately, I can't find any pictures of what DWC looks like on a touch display. Does anyone have some for me?
-
RE: Core XY high speed closed loop tuningposted in Tuning and tweaking
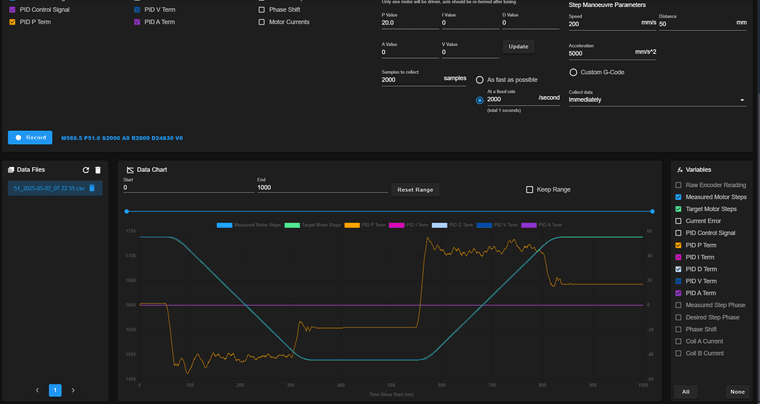
This is the plot befor adding the D therm

Should i use 30-50% off the current P therm and test again?
-
RE: Core XY high speed closed loop tuningposted in Tuning and tweaking
I did a quick, rough tuning to see if I was making any mistakes.
Step 1 Speed and Accels
Speed too low
Speed OkStep 2 A therm

A too low (A30.000)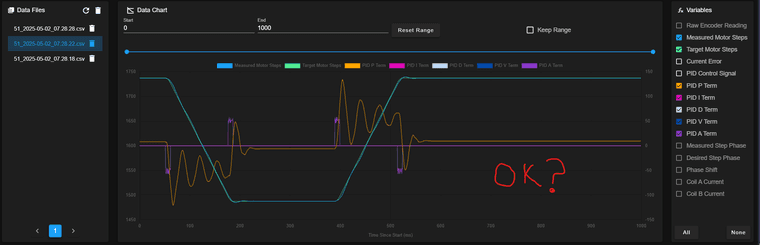
A therm is ok(A40.000)
A too heigh odd spikes in P therm(A50.000)Step 3 V therm

V too low(V300)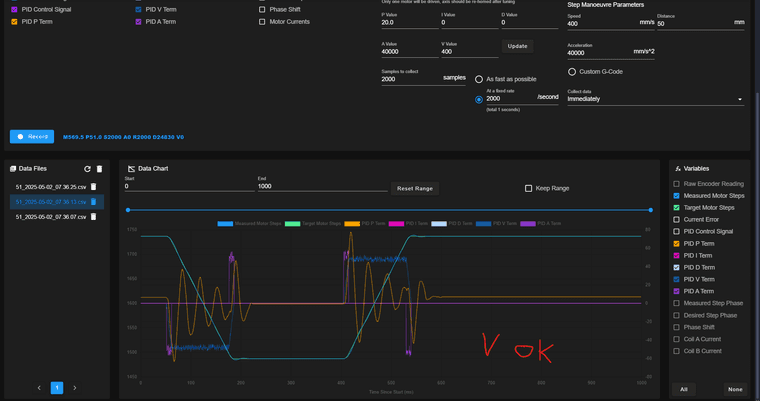
V ok(V400)
V too high(V500)Step 4 D therm

D ok(D0.1)
D better but to loud(D0.2)Step 5 I therm

P20 A40.000 V400 D0.1 I0 Current tune no steady error. Do i even need a I therm because i dont really have a steady-state error?
I500
I1000
I1500System specs:
-Version 3.6.0-RC3
-LDO 42STH48-2504AC i pressed in a longer shaft in the rotor to fit an encoder to the back
-48V
-2500A for the motors
-AMT10E3 encoder 2000PPR -
RE: Core XY high speed closed loop tuningposted in Tuning and tweaking
@dc42
I use a travel acceleration of 40k mm/s. I tuned it between travel and printing Speed. -
RE: Core XY high speed closed loop tuningposted in Tuning and tweaking
About */-~1.5 Steps of error in the closed Loop Tuning Plugin. I have set my error boundary to E2:3. I don't get any messages while printing, but I do get them when traveling.
-
RE: Core XY high speed closed loop tuningposted in Tuning and tweaking
I wanted to get in touch again. I've put the closed loop project on hold for a while and now I want to get back to it. My main problem is the big error when accelerating and decelerating.
-
RE: Core XY high speed closed loop tuningposted in Tuning and tweaking
Yes, i run them at 48V!
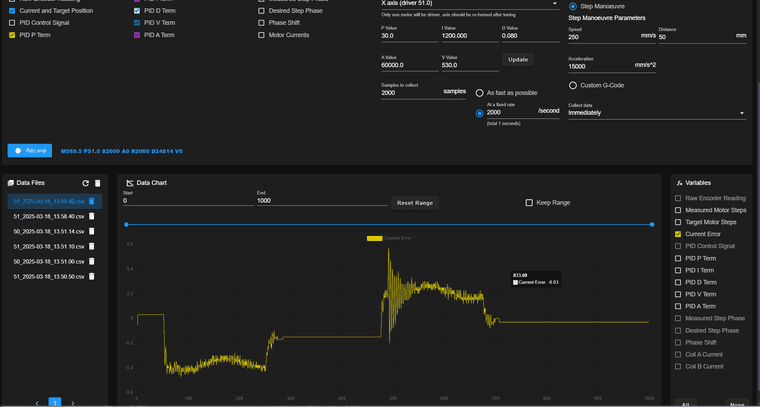
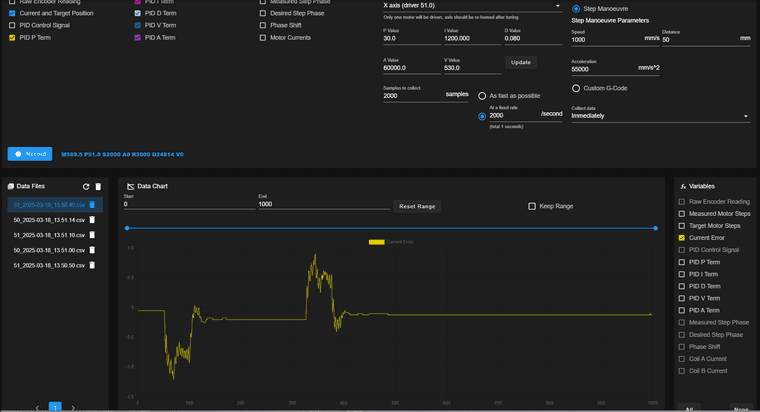
This is X axis print speed:

(X-Print)51_2025-03-18_13.50.50.csvY axis print speed:

(Y-Print)50_2025-03-18_13.51.00.csvX axis travel speed:

(X-Travel)51_2025-03-18_13.51.10.csvY axis travel speed:
(Y-Travel)50_2025-03-18_13.51.14.csvThis is in open loop:
-
Closed loop Auto tuneposted in Firmware wishlist
When can we expect that the closed loop plugin get the autotune feature back?
-
Core XY high speed closed loop tuningposted in Tuning and tweaking
Hi,
i need help tuning my XY motors on my corexy, i want to run them in closed loop. I want to run 250mm/s 10K-20Kmm² for printing and 800-1000mm/s 50K-60K for travel with 3000 Jerk. The problem now is that the pid tune for printing moves isns't good for travel moves. For now i use a p therm off 30 should i increase it or is it better to increase the A and V therm?
-
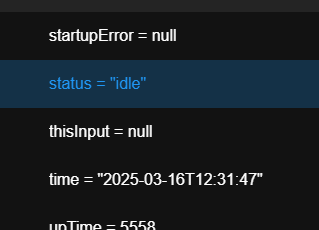
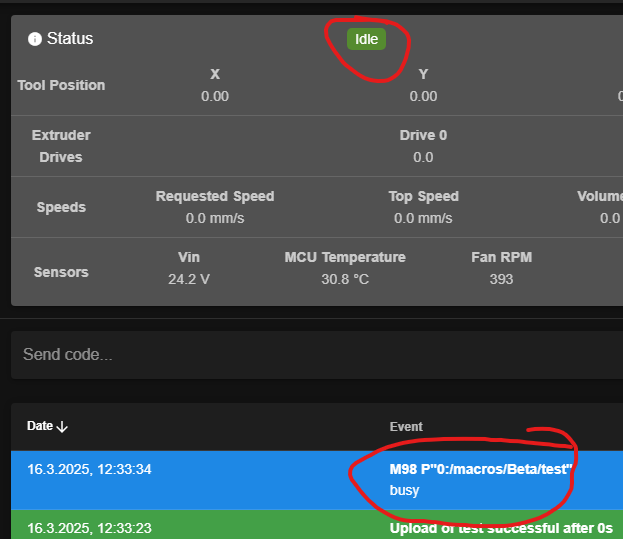
[3.6.0-RC1] state.status incorrectposted in Beta Firmware
In dwc, state.status is displayed as idle as well as in the object model. However, busy is displayed when I query state.status via meta commands.
M122 === Diagnostics === RepRapFirmware for Duet 3 Mini 5+ version 3.6.0-rc.1 (2025-02-28 14:59:42) running on Duet 3 Mini5plus WiFi (standalone mode) Board ID: 9458S-K296U-D65J0-40KMW-LM03Z-R6DMH Used output buffers: 1 of 40 (29 max) === RTOS === Static ram: 94764 Dynamic ram: 95596 of which 392 recycled Never used RAM 50716, free system stack 188 words Tasks: NETWORK(1,nWait 7,16.2%,173) HEAT(3,nWait 6,0.0%,350) Move(4,nWait 6,0.0%,353) TMC(4,nWait 6,0.8%,99) CanReceiv(6,nWait 1,0.1%,771) CanSender(5,nWait 7,0.0%,336) CanClock(7,delaying,0.0%,348) MAIN(1,running,82.0%,402) IDLE(0,ready,0.1%,29) USBD(3,blocked,0.0%,147) AIN(4,delaying,0.8%,261), total 100.0% Owned mutexes: WiFi(NETWORK) === Platform === Last reset 01:37:25 ago, cause: power up Last software reset at 2025-03-14 07:38, reason: User, Gcodes spinning, available RAM 49956, slot 1 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00489000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a === Storage === Free file entries: 20 SD card 0 detected, interface speed: 22.5MBytes/sec SD card longest read time 6.7ms, write time 92.6ms, max retries 0 === Move === Segments created 0, maxWait 0ms, bed comp in use: none, height map offset 0.000, hiccups added 0/0 (0.00/0.00ms), max steps late 0, ebfmin 0.00, ebfmax 0.00 Pos req/act/dcf: 0.00/0/0.00 0.00/0/0.00 0.00/0/0.00 No step interrupt scheduled Driver 0: standstill, SG min 0, r/w errs 0/0, ifcnt 14, reads/writes 45469/14, timeouts 0, DMA errs 0, CC errs 0 Driver 1: standstill, SG min 0, r/w errs 0/0, ifcnt 10, reads/writes 45473/10, timeouts 0, DMA errs 0, CC errs 0 Driver 2: standstill, SG min 0, r/w errs 0/0, ifcnt 10, reads/writes 45472/10, timeouts 0, DMA errs 0, CC errs 0 Driver 3: standstill, SG min 0, r/w errs 0/0, ifcnt 10, reads/writes 45472/10, timeouts 0, DMA errs 0, CC errs 0 Driver 4: standstill, SG min 0, r/w errs 0/0, ifcnt 10, reads/writes 45473/10, timeouts 0, DMA errs 0, CC errs 0 Driver 5: not present Driver 6: not present === Heat === Bed heaters 0 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0 Heater 1 is on, I-accum = 0.0 === GCodes === Movement locks held by null, null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 File2 is idle in state(s) 0 Queue2 is idle in state(s) 0 === CAN === Messages queued 51122, received 303963, lost 0, ignored 0, errs 619, boc 0 Longest wait 2ms for reply type 6062, peak Tx sync delay 959, free buffers 26 (min 25), ts 27703/27702/0 Tx timeouts 0,0,0,0,0,0 === Network === Slowest loop: 205.88ms; fastest: 0.00ms Responder states: MQTT(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) HTTP sessions: 1 of 8 === WiFi === Interface state: active Module is connected to access point Failed messages: pending 0, notrdy 0, noresp 0 Firmware version 2.2.1 Module reset reason: Power up, Vcc 3.40, flash size 2097152, free heap 39188 MAC address f0:08:d1:03:80:57 IP address 192.168.178.65 Signal strength -45dBm, channel 6, mode 802.11n, reconnections 0 Clock register 00002002 Socket states: 0 0 0 0 0 0 0 0 -
RE: Assissted open loop Modeposted in Tuning and tweaking
After extensive testing, I concluded that something was distorting my sensor reading. Since I had two SameSky CUI AMT10E3 capacitive encoders.

I set them to 2500PPR and mounted them. Now closed loop runs whisper quiet. Here are two examples:
-
RE: Assissted open loop Modeposted in Tuning and tweaking
I run two LDO 42SHT48-2504AC Steppers. I connected a quadrature encoder with 1000PPR for testing and now they are completly silent also the d therm goes almost to zero at motor standstill. Is it maybe electrical noise that interrupt the magnetic encoder signal?
-
RE: Assissted open loop Modeposted in Tuning and tweaking
@T3P3Tony
@dc42
I found the problem!!!the load noise is caused by a slight misplacement of the encoder, if I turn the motor another 90 degrees the noise disappears completely when I slightly move the pcb. Is there a good way to align the encoder pcb? Also the D therm goes almost to zero when the motors are standing still!
Here is a video:
encoder.mp4 -
Input shaping on Expansion Boardposted in Documentation
Hi,
This page describes the reasons for using input shaping and the support for input shaping in RepRapFirmware. Note, as at firmware version 3.4, input shaping is only applied to axis motors driven directly from the Duet3 main board, not to axis motors driven from CAN-connected expansion boards.
I saw that input shaping in the documentation does not work for expansion board driven axis, but I think I saw in the forum that this is fixed with firmware Version 3.5.
-
RE: Assissted open loop Modeposted in Tuning and tweaking
@T3P3Tony
@dc42 I followed your instructions and it helped a little, but the loud noise persists. Here are some videosP=25 D=0.1
D0.1.mp4
P=25 D=0.0
D0.0.mp4
Driver in spreadcycle
spreadcycle.mp4Also, what I noticed is that when standing still my d therm oscillates slightly which is not visible in the tuning plot in the duet documentation guide.
-
RE: Assissted open loop Modeposted in Tuning and tweaking
I tried a P therm of 10/15/20/25/30/40. Smaller P therms with smaller D therms were quieter but still loud.Also a high A therm makes it also noisy. What I noticed was that if I put light pressure with a finger on the axis when it is stationary, the noise almost completely disappears. It's the same at slow speeds. At first I thought it was oscillations from a too high D therm, so I tried to go down to a D therm of only 0.01, but then my P therm oscillates a bit +/- ~5 .Then they are actually very quiet. How much oscillation is ok for the P therm?