Ah, gotcha! It all makes sense now. Thank you for explaining it to me. Very much appreciated again!
Posts made by BattleDroid
-
RE: Not homing in correct direction.posted in Firmware installation
-
RE: Not homing in correct direction.posted in Firmware installation
Well this is why I asked cause I did't understand I guess. And I could have been getting confused between those. But realistically I guess I just didn't understand that part of the board. But I believe I understand now for the most part. So the jumper can either be 5v/ V_fan supplied by the board. Or V_fan/VIN which would be 24v supplied for the power supply. As for the other jumpers, I still don't quite understand. But I assume they are irrelevant since I'm getting power through VIN and not 5v?
Also sorry I also wasn't too clear earlier too. I was referencing the duet wiki. Jumping back and forth between the wiki, and the diagram of the board. I also realize i quoted the line under it which added the two banks part. But still basically gives the same information.
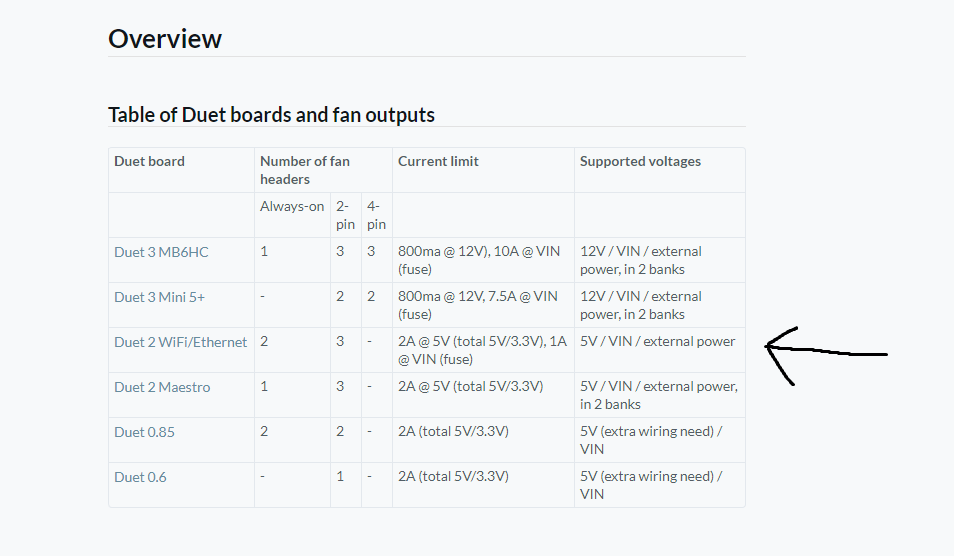
This is why I thought the two always on fans would be different (external power), and the other three would be determined from the jumper. But I was mistaken.
I just want to make sure I properly supply them with 24v and have everything hooked up correctly is all. Just trying to learn it and figure it out best I can. Without messing stuff up. Some things I can be a little slow to learn, others I catch on right away. This I seemed to reread over and just not grasp it.
-
RE: Not homing in correct direction.posted in Firmware installation
I think you summed it up pretty well for me actually. Sorry if I was confusing. I was getting wound up in the supplied voltages. And using the jumper pins. I think I was over thinking it. I couldn't figure out in my head what vin was, but after you wrote it out I think I got it. And seems clear. Its either 5v or vin(24v). I got caught up in the "supported voltages (5V / VIN / external power, in 2 banks)". For some reason I was thrown off about it. But now I realize the external power, in 2 banks is the always on fans. As long as I have the jumper set to vin I should be alright to hook up 24v fans in the pwm slots. Thank you for clearing that up for me, I feel dumb asking that now. Even re reading the wiki makes more sense to me now.
-
RE: Not homing in correct direction.posted in Firmware installation
Hey guys, had a simple question about wiring cooling fans to the duet. Pretty basic but I cant find a definite answer and just want to be sure before I go ahead. Instead of making a new thread ill just post here.
I have printed some things for my widow. I'm looking to hook up a couple print cooling fans. I cant find an explanation on how to wire it up. I don't get the whole, 5v, VIN?, and external. I understand external being the power supply. Which is 24v. And 5v is basic 5v. I cant seem to find an answer from the wiki or the forum what vin is. Is it as simple as plug and play and then change some config files? I have two fans I'd like to hook up, and then get going. Which are both 24v. But I don't want to just hook them up and have something not right and short the board. Also I cant tell if they are pwm or not, or if you can even get 24v pwm. That's another thing I cant figure out. Its easy to find 12v everything, but 24v seems harder to sort through. I guess you can say I'm hesitant until I can find a proper answer. Possibly overthinking it. Thanks again.
-
RE: Not homing in correct direction.posted in Firmware installation
Gotcha! Well as of right now I had rewired all the wires on the BLtouch. And all seems to be working well! It ended up being the 3 wire cable going to power ground and heater 3. I can now home everything correctly. And all seems to be working thus far. Just working on tuning nozzle height and position with the BLtouch a bit closer. And then I'm going to try to heat up the nozzle and try kicking out some filament before I start calibrating the extruder and making sure everything is dialed in correctly.
Thank you guys for your help. I would not have figured it out without. Very much appreciated.
-
RE: Not homing in correct direction.posted in Firmware installation
So after supper here I took the BLtouch off, and plugged the white and black directly to the board, and then I took the extension cable out and am just using the one cable going to 5v, gnd, and heater3. But I noticed now when I power on the board now. It still probes in and out. But now the red light on the BLtouch is blinking? M401/402 still doesnt work. Does this mean it could be a wiring issue? Also I don't know if it matters but I just have it sitting on the control box upside down since the white and black are pretty short.
To edit what I just typed. Instead of erasing, so you can see whats going on. I turned power off. Just rotated the bl touch to point down. Turned power back on. It did its probe thing. I entered 401 and it probed out. And m402 probed in. Glad to see it working. So initially it must be a wiring thing like you guys mentioned. But I also ask for the sake of it could the orientation of the bltouch have anything to do with the blinking or what not? Having it upside down?
-
RE: Not homing in correct direction.posted in Firmware installation
I have tried all 3 of those commands for it not to do anything. Just gives me a good green signal at the bottom. I will double check that connection.
Sending m280 commands also leads to nothing moving, just a green bar with it in console.
I did change that pin name to exp.heater3.FIRMWARE_NAME: RepRapFirmware for Duet 2 WiFi/Ethernet FIRMWARE_VERSION: 3.1.1 ELECTRONICS: Duet WiFi 1.02 or later FIRMWARE_DATE: 2020-05-19b2
M98 p"config.g"
HTTP is enabled on port 80
FTP is disabled
TELNET is disabled
Warning: Heater 0 appears to be over-powered. If left on at full power, its temperature is predicted to reach 365C
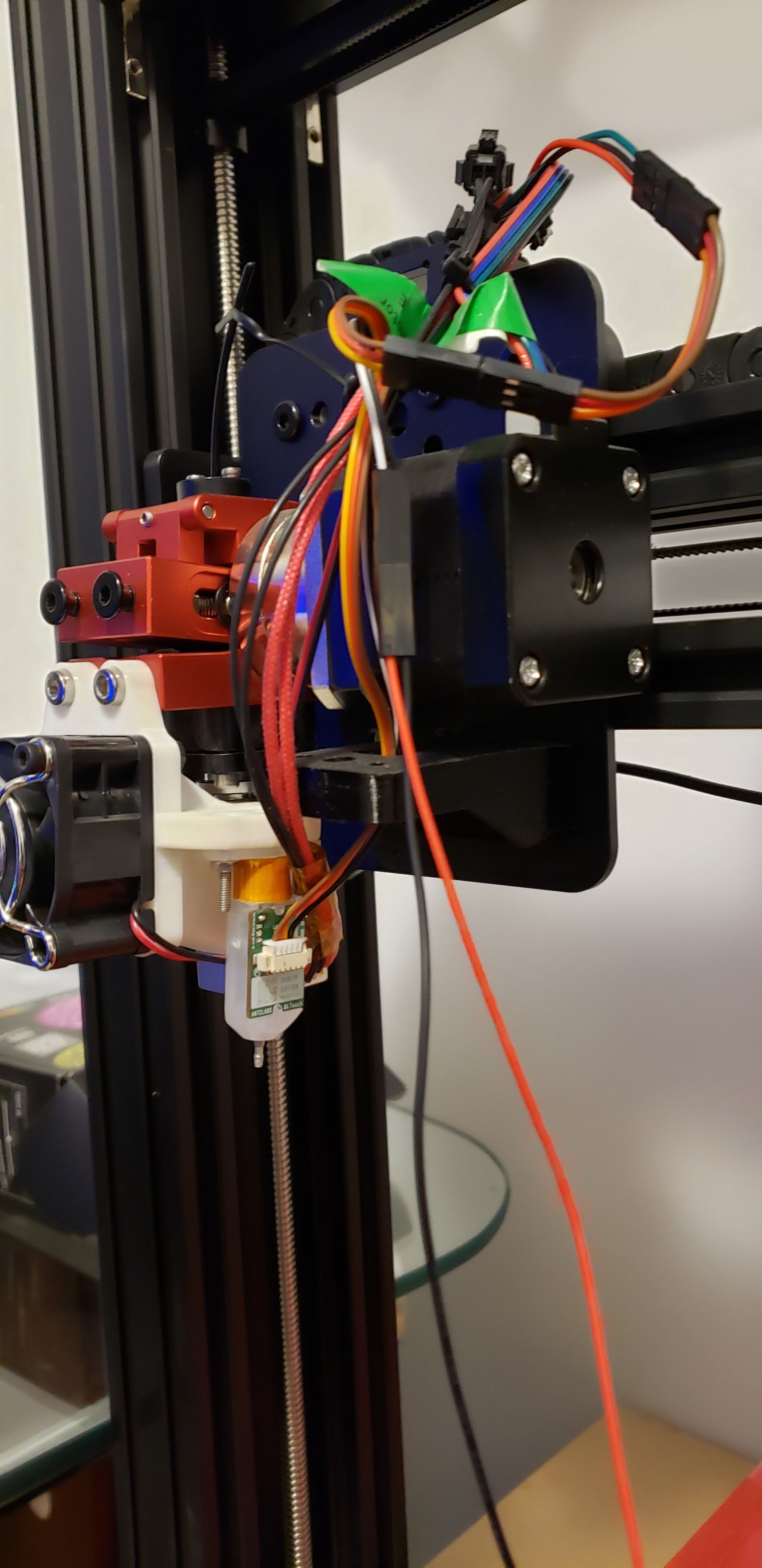
Warning: Heater 0 appears to be over-powered. If left on at full power, its temperature is predicted to reach 203CIll try to figure out a photo of the wiring here. Hopefully it works.

-
RE: Not homing in correct direction.posted in Firmware installation
@fcwilt
Hello,Yes I do have it connected to the 50 pin expansion. 1) +5v 2)GND 8)Heater3 and then connected to zprobe pins: z probe in and ground. Basically just how the wiki shows. I am using duet 2 board.
-
RE: Not homing in correct direction.posted in Firmware installation
Ok reading that, and going back a bit here. Before I can test and calibrate I believe I need to get the probe to retract properly first. I do have both of those macro files in /sys. When I send m401 and m402 nothing seems to happen. Same if I send M280 P0 S10. When I first supply power to the board turning the printer on the probe will deploy and retract twice.
I read through the BLtouch wiki a couple times now, but I believe we covered most of that here already, the labeling for the BLtouch and whatnot. I'm not sure where to look next. Aside from my probe in/out files. Do I need an additional m280 code in the config.g file? -
RE: Not homing in correct direction.posted in Firmware installation
Ok, in relation to that. Do I use how far the probe is from the nozzle? or Nozzle from the probe?
Example: I used
G31 P500 X24.1 Y21.4 Z-4.5 ; set Z probe trigger value, offset and trigger height. The probe being closer to the front of the nozzle(+), and to the right (+).Edit, I just seen the link you added after I replied, reading through that now.
-
RE: Not homing in correct direction.posted in Firmware installation
Also I was messing around with the mesh settings there on the x andy, im changing them more to the center right now.
Edit i think i just realized thats describing the dimensions of where i can probe.
-
RE: Not homing in correct direction.posted in Firmware installation
Ok i will change that.
Does this seem more correct now in my config?
; Z-Probe BLtouch
M950 S0 C"heater3" ;create servo pin 0 for BLTouch
M558 P9 C"^zprobe.in" H5 F200 T6000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X0 Y0 Z2 ; set Z probe trigger value, offset and trigger height
M557 X15:215 Y45:195 S20 ; define mesh grid -
RE: Not homing in correct direction.posted in Firmware installation
@Phaedrux
Sorry thats alot to take in at once. I appologize for being slow. I am using heater pin 3.Here is my homeall while I re read that again.
; homeall.g
; called to home all axes
;
; generated by RepRapFirmware Configuration Tool v3.2.2 on Sat Jan 23 2021 15:36:11 GMT-0600 (Central Standard Time)
G91 ; relative positioning
G1 H2 Z5 F6000 ; lift Z relative to current position
G1 H1 X-375 Y-255 F1800 ; move quickly to X and Y axis endstops and stop there (first pass)
G1 H2 X-5 Y-5 F6000 ; go back a few mm
G1 H1 X-375 Y-255 F360 ; move slowly to X and Y axis endstops once more (second pass)
G90 ; absolute positioning
G1 X15 Y15 F6000 ; go to first bed probe point and home Z
G30 ; home Z by probing the bed; Uncomment the following lines to lift Z after probing
;G91 ; relative positioning
;G1 Z5 F100 ; lift Z relative to current position
;G90 ; absolute positioning -
RE: Not homing in correct direction.posted in Firmware installation
I cant say if I do or not. I did try the M401 and M402 commands which didn't seem to do anything. So I assume not? I will try to look into this more.
-
RE: Not homing in correct direction.posted in Firmware installation
Ah, gotcha. That makes sense now. Thank you. You guys have been super helpful. I just closed about 30 tabs since those questions have been solved for me. haha
I am now trying to see if I can get the probe to work. I am googling how to change the mesh grid(?) when it probes. I noticed when it first tried to probe it wasn't quite on the bed. I am assuming its coordinates on the m557 line. Still searching. The other thing I have to find is why it doesn't deploy the probe when it starts homing. It is lit up, it will kick in and out when I turn the printer on. But I need to find what I change to make it deploy when it goes to home.
-
RE: Not homing in correct direction.posted in Firmware installation
Thank you for confirming. So I changed the high end low end. And set the values to negative. And I cant believe it was that much of a hassle for me for that easy of a fix. I believe I have changed those values before but most likely not both together. Which now kinda makes sense why I was getting the endstop errors. But now I kind of have a better understanding of that. Thank you guys. It is now homing correctly. I will now move on to see if I can get the bl touch to work correctly, that I am also fishing in the dark with.
But as for my other problem. I sent M303 H0 S60. It is now tuning the bed. After it tunes (its been going for about 5-10 mins now) assuming it is good I am to Send M500 to save. Then what is M501? Just to load those parameters when it goes to heat up? Also where at the end of my config should I add M501? Just right at the end?
Also what is a bed slinger? lol
-
RE: Not homing in correct direction.posted in Firmware installation
Thank you for your quick responses. Sorry if I sound daft. When you say high end low end. Example being on my gantry x axis moves left to the (-) end. That would be the low end correct?
So That being said my endstops are on the low end on both my x and y. And i should change (m574 X2) to (m574 X1). Correct?
Then in my home (all)(x)(y) config change the positive values to negative values. Which should change the direction?
Also a few more responses since Ive been typing. Cant keep up. Sorry.
To confirm in my head believe I have the closest left of the bed is my zero. Thats how it was before, and thats how my reprap prusa is as well. So when they home normally the gantry goes left, bed goes back, and then normally the nozzle would zero on a sensor. But this time around im hoping to get the bl touch working. And use that with this printer.
-
Not homing in correct direction.posted in Firmware installation
Hi guys, kinda somewhat new here. But have been searching through the forums for a while now. Trying to fix the some of problems I have on my own by trying other peoples problems, but non seem to be the exact problem(s) I'm having. Nor can I find the solutions to my problems, hence why I am here. I am not so good with firmware. Hopefully this is the right spot to post. I have a few problems concerning the board and my printer.
So about my printer. I have a completely stock Tevo: Black widow. And I am using a Duet 2 Wifi board. Stock endstop sensors. With BL Touch.
So since I have tried switching to this board and what not, it has not been up and running yet. I have 2 problems so far that I have reached.
(1) Where I am at is I can disable home (M564 H0 S0) and physically through dashboard move all my axis in the correct direction. ( X+ to the right, y- to the back, z+ up) Where I am stuck is when I home X or Y they go in the wrong direction. After tinkering more I have got the endstops to work correctly when triggered. Now its just more less changing the direction of X and Y when they home. I cant seem to find a proper answer through the forum to fix my issue. Before when I would try to change settings in config I would usually end up with "failed to enable endstops", or nothing would move. etc.
(2) My second problem I have encountered trying to get it all to work, is that when I try to Heat up the bed I get a "heater 0 fault: temperature rising much more slowly than the expected 1.7 C/sec". Although it is heating up slowly, I'm not sure on this matter as I've spent more time trying to figure out the other axis problem first, but I figured I would post it anyways since I'm already here. I am still using the mosfet that came with the printer originally. I imagine that is the culprit and I'm missing something. I feel I might just take it out of the equation for now until I can get the rest of the printer running properly.
The printer has run fine in the past before this board. As of right now I have not tried the bl touch, or my extruder. The extruder itself heats up fine. but havent tried extruding filament yet. Thanks in advance for your help. I will post my config.g under this as well.
; Configuration file for Duet WiFi (firmware version 3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.2.2 on Sat Jan 23 2021 15:36:10 GMT-0600 (Central Standard Time); General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"My Printer" ; set printer name; Network
M552 S1 ; enable network
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet; Drives
M569 P0 S1 ; physical drive 0 goes forwards
M569 P1 S0 ; physical drive 1 goes forwards
M569 P2 S0 ; physical drive 2 goes forwards
M569 P3 S1 ; physical drive 3 goes forwards
M584 X0 Y1 Z2 E3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z1600.00 E420.00 ; set steps per mm
M566 X900.00 Y900.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z20.00 E250.00 ; set accelerations (mm/s^2)
M906 X1050 Y1050 Z1050 E1050 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X370 Y250 Z370 S0 ; set axis maxima; Endstops
M574 X2 S1 P"!xstop" ; configure active-high endstop for high end on X via pin !xstop
M574 Y2 S1 P"!ystop" ; configure active-high endstop for high end on Y via pin !ystop
M574 Z1 S2 ; configure Z-probe endstop for low end on Z; Z-Probe
M558 P1 C"zprobe.in+zprobe.mod" H5 F120 T6000 ; set Z probe type to unmodulated and the dive height + speeds
G31 P500 X0 Y0 Z2 ; set Z probe trigger value, offset and trigger height
M557 X15:215 Y15:195 S20 ; define mesh grid; Heaters
M308 S0 P"bedtemp" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin bedtemp
M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0
M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M308 S1 P"e0temp" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin e0temp
M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S280 ; set temperature limit for heater 1 to 280C; Fans
M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off
M950 F1 C"fan1" Q500 ; create fan 1 on pin fan1 and set its frequency
M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on; Tools
M563 P0 D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C; Custom settings are not defined