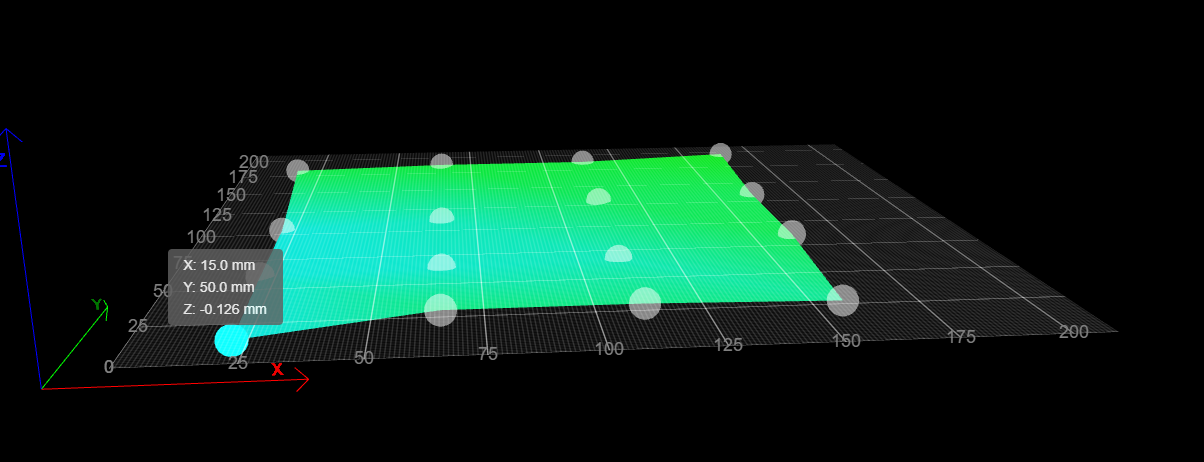
Why my HeightMap have negative values? Its based on my Z offset or something?
Config...
; Configuration file for Duet 3 Mini 5+ (firmware version 3.3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.3.4 on Fri Oct 15 2021 18:08:53 GMT-0300 (Horário Padrão de Brasília)
; General preferences
M575 P1 S1 B57600 ; enable support for PanelDue
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"José Arthur's Printer" ; set printer name
; Network
M552 S1 ; enable network
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet
; Drives
M569 P0.0 S1 D3 V60 ; physical drive 0.0 goes forwards
M569 P0.1 S0 D3 V60 ; physical drive 0.1 goes forwards
M569 P0.2 S0 ; physical drive 0.2 goes forwards
M569 P0.3 S1 ; physical drive 0.3 goes forwards
M569 P0.4 S0 ; physical drive 0.4 goes forwards
M584 X0.0 Y0.1 Z2:4 E0.3 ; set drive mapping
M350 X32 Y32 Z32 E32 I1 ; configure microstepping with interpolation
M92 X160.00 Y160.00 Z3200.00 E830.00 ; set steps per mm
M566 X900.00 Y900.00 Z100.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z300.00 E1200.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z100.00 E250.00 ; set accelerations (mm/s^2)
M906 X1000 Y1000 Z1000 E1000 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout
; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X210 Y210 Z200 S0 ; set axis maxima
; Endstops
M574 X1 S3 ; configure sensorless endstop for low end on X
M574 Y1 S3 ; configure sensorless endstop for low end on Y
M574 Z1 S2 ; configure Z-probe endstop for low end on Z
M915 X S8 F0 R0 ; Set X axis Sensitivity
M915 Y S8 F0 R0 ; Set X axis Sensitivity
; Z-Probe
M950 S0 C"io3.out" ; create servo pin 0 for BLTouch
M558 P9 C"io3.in" H5 F60 T6000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X0 Y50 Z2.7 ; set Z probe trigger value, offset and trigger height
M557 X15:200 Y0:200 S50 ; define mesh grid
; Heaters
M308 S0 P"temp0" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin temp0
M950 H0 C"out0" T0 ; create bed heater output on out0 and map it to sensor 0
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M308 S1 P"temp1" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin temp1
M950 H1 C"out1" T1 ; create nozzle heater output on out1 and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S280 ; set temperature limit for heater 1 to 280C
M307 H0 B0 R0.230 C300.2 D10.67 S1.00 V12.2 ; PID
; Fans
M950 F0 C"out5" Q500 ; create fan 0 on pin out5 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off
M950 F1 C"out4" Q500 ; create fan 1 on pin out4 and set its frequency
M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on
; Tools
M563 P0 D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C
; Custom settings are not defined